 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenGait: A Transformer-Based Model for Human Gait Anomaly Detection and Normative Twin Generation
Apr 02, 2026Gait analysis provides an objective characterization of locomotor function and is widely used to support diagnosis and rehabilitation monitoring across neurological and orthopedic disorders. Deep learning has been increasingly applied to this domain, yet most approaches rely on supervised classifiers trained on disease-labeled data, limiting generalization to heterogeneous pathological presentations. This work proposes a label-free framework for joint-level anomaly detection and kinematic correction based on a Transformer masked autoencoder trained exclusively on normative gait sequences from 150 adults, acquired with a markerless multi-camera motion-capture system. At inference, a two-pass procedure is applied to potentially pathological input sequences, first it estimates joint inconsistency scores by occluding individual joints and measuring deviations from the learned normative prior. Then, it withholds the flagged joints from the encoder input and reconstructs the full skeleton from the remaining spatiotemporal context, yielding corrected kinematic trajectories at the flagged positions. Validation on 10 held-out normative participants, who mimicked seven simulated gait abnormalities, showed accurate localization of biomechanically inconsistent joints, a significant reduction in angular deviation across all analyzed joints with large effect sizes, and preservation of normative kinematics. The proposed approach enables interpretable, subject-specific localization of gait impairments without requiring disease labels. Video is available at https://youtu.be/Rcm3jqR5pN4.
Estimating Trust in Human-Robot Collaboration through Behavioral Indicators and Explainability
Jan 27, 2026Industry 5.0 focuses on human-centric collaboration between humans and robots, prioritizing safety, comfort, and trust. This study introduces a data-driven framework to assess trust using behavioral indicators. The framework employs a Preference-Based Optimization algorithm to generate trust-enhancing trajectories based on operator feedback. This feedback serves as ground truth for training machine learning models to predict trust levels from behavioral indicators. The framework was tested in a chemical industry scenario where a robot assisted a human operator in mixing chemicals. Machine learning models classified trust with over 80\% accuracy, with the Voting Classifier achieving 84.07\% accuracy and an AUC-ROC score of 0.90. These findings underscore the effectiveness of data-driven methods in assessing trust within human-robot collaboration, emphasizing the valuable role behavioral indicators play in predicting the dynamics of human trust.
Graph-based Online Monitoring of Train Driver States via Facial and Skeletal Features
May 09, 2025Driver fatigue poses a significant challenge to railway safety, with traditional systems like the dead-man switch offering limited and basic alertness checks. This study presents an online behavior-based monitoring system utilizing a customised Directed-Graph Neural Network (DGNN) to classify train driver's states into three categories: alert, not alert, and pathological. To optimize input representations for the model, an ablation study was performed, comparing three feature configurations: skeletal-only, facial-only, and a combination of both. Experimental results show that combining facial and skeletal features yields the highest accuracy (80.88%) in the three-class model, outperforming models using only facial or skeletal features. Furthermore, this combination achieves over 99% accuracy in the binary alertness classification. Additionally, we introduced a novel dataset that, for the first time, incorporates simulated pathological conditions into train driver monitoring, broadening the scope for assessing risks related to fatigue and health. This work represents a step forward in enhancing railway safety through advanced online monitoring using vision-based technologies.
Learning and Online Replication of Grasp Forces from Electromyography Signals for Prosthetic Finger Control
May 05, 2025Partial hand amputations significantly affect the physical and psychosocial well-being of individuals, yet intuitive control of externally powered prostheses remains an open challenge. To address this gap, we developed a force-controlled prosthetic finger activated by electromyography (EMG) signals. The prototype, constructed around a wrist brace, functions as a supernumerary finger placed near the index, allowing for early-stage evaluation on unimpaired subjects. A neural network-based model was then implemented to estimate fingertip forces from EMG inputs, allowing for online adjustment of the prosthetic finger grip strength. The force estimation model was validated through experiments with ten participants, demonstrating its effectiveness in predicting forces. Additionally, online trials with four users wearing the prosthesis exhibited precise control over the device. Our findings highlight the potential of using EMG-based force estimation to enhance the functionality of prosthetic fingers.
PRO-MIND: Proximity and Reactivity Optimisation of robot Motion to tune safety limits, human stress, and productivity in INDustrial settings
Sep 10, 2024



Despite impressive advancements of industrial collaborative robots, their potential remains largely untapped due to the difficulty in balancing human safety and comfort with fast production constraints. To help address this challenge, we present PRO-MIND, a novel human-in-the-loop framework that leverages valuable data about the human co-worker to optimise robot trajectories. By estimating human attention and mental effort, our method dynamically adjusts safety zones and enables on-the-fly alterations of the robot path to enhance human comfort and optimal stopping conditions. Moreover, we formulate a multi-objective optimisation to adapt the robot's trajectory execution time and smoothness based on the current human psycho-physical stress, estimated from heart rate variability and frantic movements. These adaptations exploit the properties of B-spline curves to preserve continuity and smoothness, which are crucial factors in improving motion predictability and comfort. Evaluation in two realistic case studies showcases the framework's ability to restrain the operators' workload and stress and to ensure their safety while enhancing human-robot productivity. Further strengths of PRO-MIND include its adaptability to each individual's specific needs and sensitivity to variations in attention, mental effort, and stress during task execution.
The Bridge between Xsens Motion-Capture and Robot Operating System : Enabling Robots with Online 3D Human Motion Tracking
Jun 30, 2023



This document introduces the bridge between the leading inertial motion-capture systems for 3D human tracking and the most used robotics software framework. 3D kinematic data provided by Xsens are translated into ROS messages to make them usable by robots and a Unified Robotics Description Format (URDF) model of the human kinematics is generated, which can be run and displayed in ROS 3D visualizer, RViz. The code to implement the to-ROS-bridge is a ROS package called xsens_mvn_ros and is available on GitHub at https://github.com/hrii-iit/xsens_mvn_ros The main documentation can be found at https://hrii-iit.github.io/xsens_mvn_ros/index.html
Maximising Coefficiency of Human-Robot Handovers through Reinforcement Learning
Jun 12, 2023



Handing objects to humans is an essential capability for collaborative robots. Previous research works on human-robot handovers focus on facilitating the performance of the human partner and possibly minimising the physical effort needed to grasp the object. However, altruistic robot behaviours may result in protracted and awkward robot motions, contributing to unpleasant sensations by the human partner and affecting perceived safety and social acceptance. This paper investigates whether transferring the cognitive science principle that "humans act coefficiently as a group" (i.e. simultaneously maximising the benefits of all agents involved) to human-robot cooperative tasks promotes a more seamless and natural interaction. Human-robot coefficiency is first modelled by identifying implicit indicators of human comfort and discomfort as well as calculating the robot energy consumption in performing the desired trajectory. We then present a reinforcement learning approach that uses the human-robot coefficiency score as reward to adapt and learn online the combination of robot interaction parameters that maximises such coefficiency. Results proved that by acting coefficiently the robot could meet the individual preferences of most subjects involved in the experiments, improve the human perceived comfort, and foster trust in the robotic partner.
An Ergonomic Role Allocation Framework for Dynamic Human-Robot Collaborative Tasks
Jan 19, 2023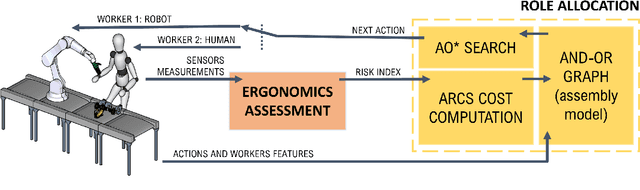
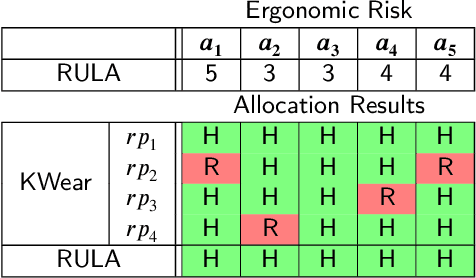

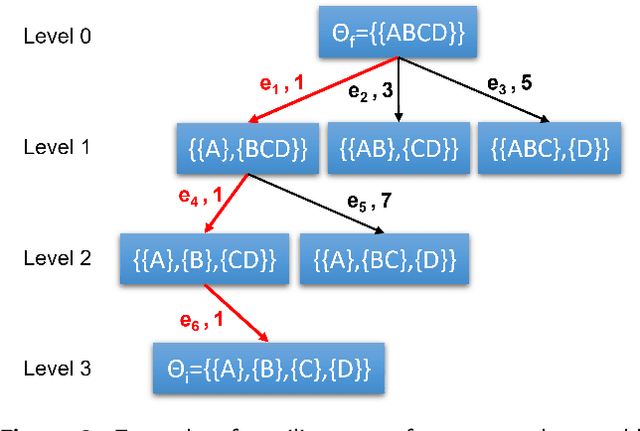
By incorporating ergonomics principles into the task allocation processes, human-robot collaboration (HRC) frameworks can favour the prevention of work-related musculoskeletal disorders (WMSDs). In this context, existing offline methodologies do not account for the variability of human actions and states; therefore, planning and dynamically assigning roles in human-robot teams remains an unaddressed challenge.This study aims to create an ergonomic role allocation framework that optimises the HRC, taking into account task features and human state measurements. The presented framework consists of two main modules: the first provides the HRC task model, exploiting AND/OR Graphs (AOG)s, which we adapted to solve the allocation problem; the second module describes the ergonomic risk assessment during task execution through a risk indicator and updates the AOG-related variables to influence future task allocation. The proposed framework can be combined with any time-varying ergonomic risk indicator that evaluates human cognitive and physical burden. In this work, we tested our framework in an assembly scenario, introducing a risk index named Kinematic Wear.The overall framework has been tested with a multi-subject experiment. The task allocation results and subjective evaluations, measured with questionnaires, show that high-risk actions are correctly recognised and not assigned to humans, reducing fatigue and frustration in collaborative tasks.
ErgoTac-Belt: Anticipatory Vibrotactile Feedback to Lead \\Centre of Pressure during Walking
Jul 08, 2022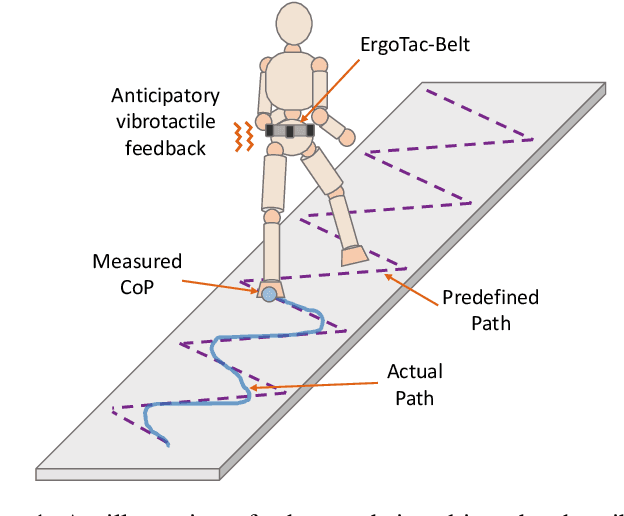
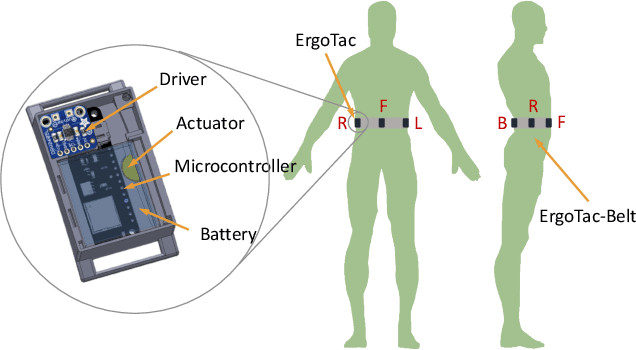
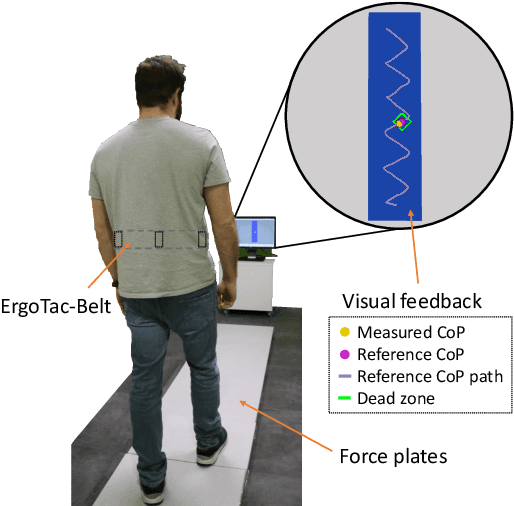
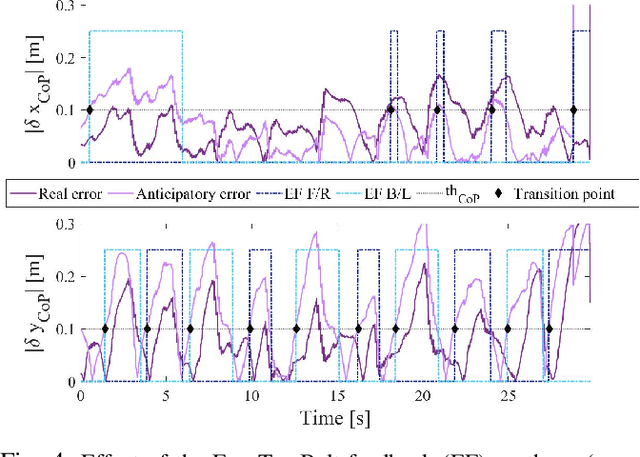
Balance and gait disorders are the second leading cause of falls, which, along with consequent injuries, are reported as major public health problems all over the world. For patients who do not require mechanical support, vibrotactile feedback interfaces have proven to be a successful approach in restoring balance. Most of the existing strategies assess trunk or head tilt and velocity or plantar forces, and are limited to the analysis of stance. On the other hand, central to balance control is the need to maintain the body's centre of pressure (CoP) within feasible limits of the support polygon (SP), as in standing, or on track to a new SP, as in walking. Hence, this paper proposes an exploratory study to investigate whether vibrotactile feedback can be employed to lead human CoP during walking. The ErgoTac-Belt vibrotactile device is introduced to instruct the users about the direction to take, both in the antero-posterior and medio-lateral axes. An anticipatory strategy is adopted here, to give the users enough time to react to the stimuli. Experiments on ten healthy subjects demonstrated the promising capability of the proposed device to guide the users' CoP along a predefined reference path, with similar performance as the one achieved with visual feedback. Future developments will investigate our strategy and device in guiding the CoP of elderly or individuals with vestibular impairments, who may not be aware of or, able to figure out, a safe and ergonomic CoP path.
Performance Analysis of Vibrotactile and Slide-and-Squeeze Haptic Feedback Devices for Limbs Postural Adjustment
Jul 08, 2022
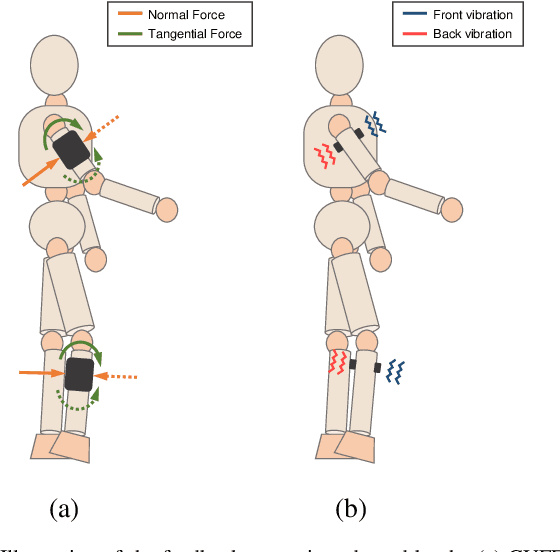
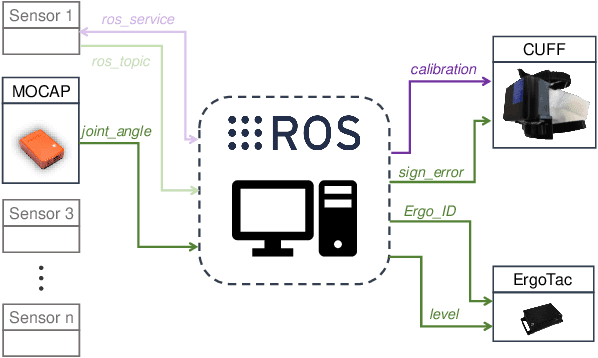
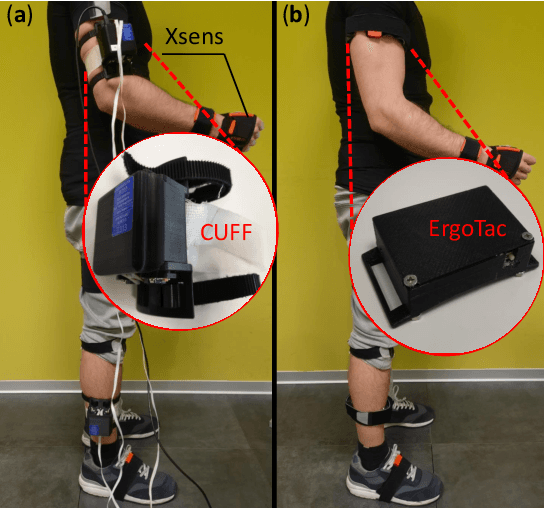
Recurrent or sustained awkward body postures are among the most frequently cited risk factors to the development of work-related musculoskeletal disorders (MSDs). To prevent workers from adopting harmful configurations but also to guide them toward more ergonomic ones, wearable haptic devices may be the ideal solution. In this paper, a vibrotactile unit, called ErgoTac, and a slide-and-squeeze unit, called CUFF, were evaluated in a limbs postural correction setting. Their capability of providing single-joint (shoulder or knee) and multi-joint (shoulder and knee at once) guidance was compared in twelve healthy subjects, using quantitative task-related metrics and subjective quantitative evaluation. An integrated environment was also built to ease communication and data sharing between the involved sensor and feedback systems. Results show good acceptability and intuitiveness for both devices. ErgoTac appeared as the suitable feedback device for the shoulder, while the CUFF may be the effective solution for the knee. This comparative study, although preliminary, was propaedeutic to the potential integration of the two devices for effective whole-body postural corrections, with the aim to develop a feedback and assistive apparatus to increase workers' awareness about risky working conditions and therefore to prevent MSDs.