 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhy you should learn functional basis
Dec 14, 2021
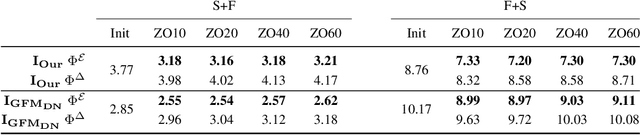
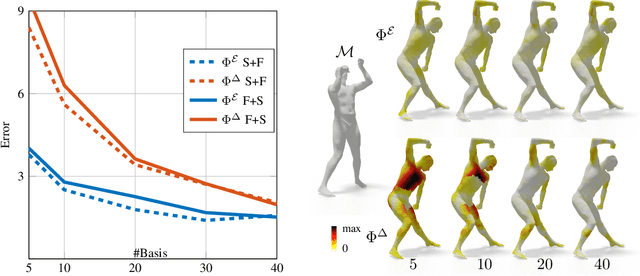
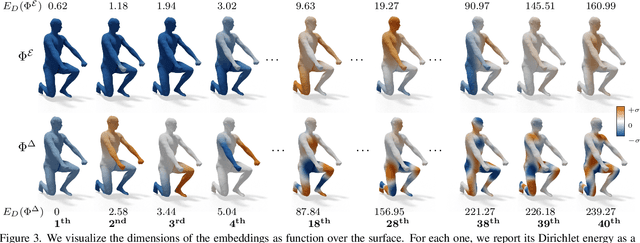
Efficient and practical representation of geometric data is a ubiquitous problem for several applications in geometry processing. A widely used choice is to encode the 3D objects through their spectral embedding, associating to each surface point the values assumed at that point by a truncated subset of the eigenfunctions of a differential operator (typically the Laplacian). Several attempts to define new, preferable embeddings for different applications have seen the light during the last decade. Still, the standard Laplacian eigenfunctions remain solidly at the top of the available solutions, despite their limitations, such as being limited to near-isometries for shape matching. Recently, a new trend shows advantages in learning substitutes for the Laplacian eigenfunctions. At the same time, many research questions remain unsolved: are the new bases better than the LBO eigenfunctions, and how do they relate to them? How do they act in the functional perspective? And how to exploit these bases in new configurations in conjunction with additional features and descriptors? In this study, we properly pose these questions to improve our understanding of this emerging research direction. We show their applicative relevance in different contexts revealing some of their insights and exciting future directions.
Learning to generate shape from global-local spectra
Aug 04, 2021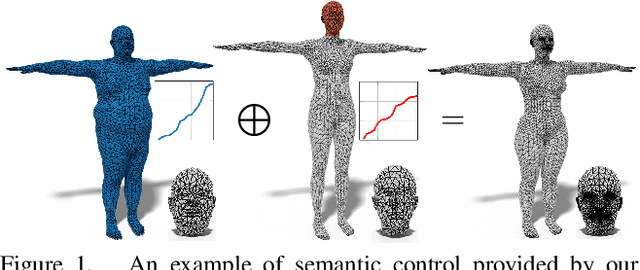
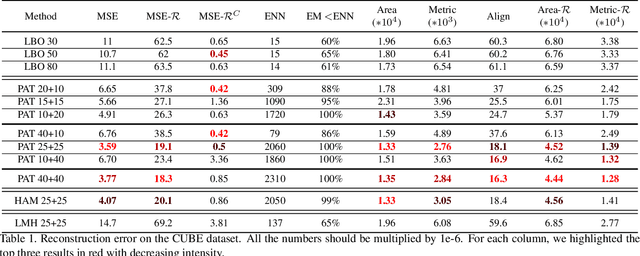
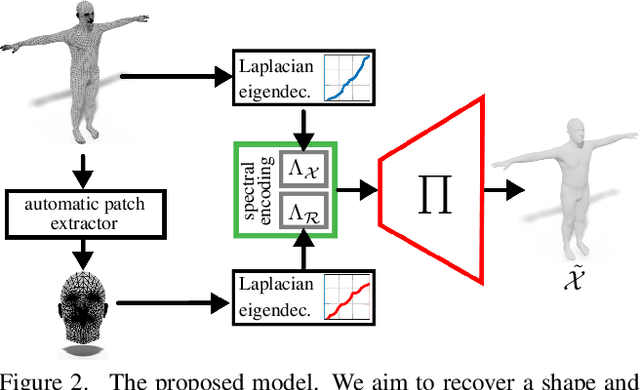
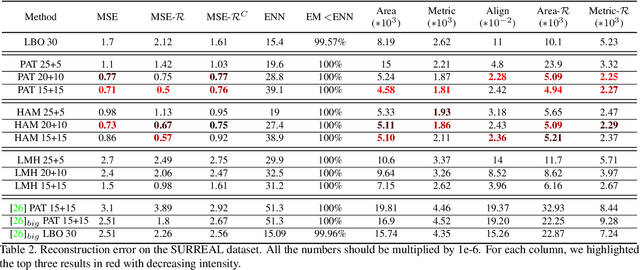
In this work, we present a new learning-based pipeline for the generation of 3D shapes. We build our method on top of recent advances on the so called shape-from-spectrum paradigm, which aims at recovering the full 3D geometric structure of an object only from the eigenvalues of its Laplacian operator. In designing our learning strategy, we consider the spectrum as a natural and ready to use representation to encode variability of the shapes. Therefore, we propose a simple decoder-only architecture that directly maps spectra to 3D embeddings; in particular, we combine information from global and local spectra, the latter being obtained from localized variants of the manifold Laplacian. This combination captures the relations between the full shape and its local parts, leading to more accurate generation of geometric details and an improved semantic control in shape synthesis and novel editing applications. Our results confirm the improvement of the proposed approach in comparison to existing and alternative methods.
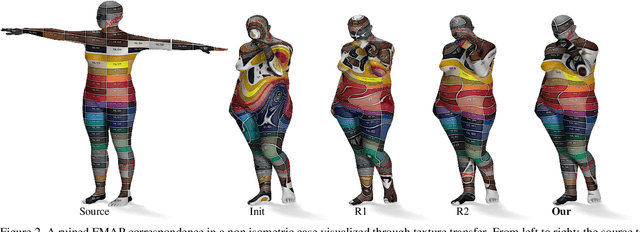
Shape registration in the time of transformers
Jun 28, 2021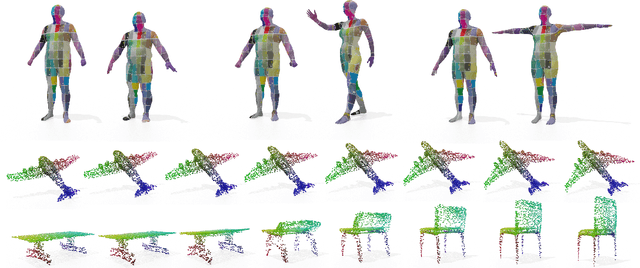
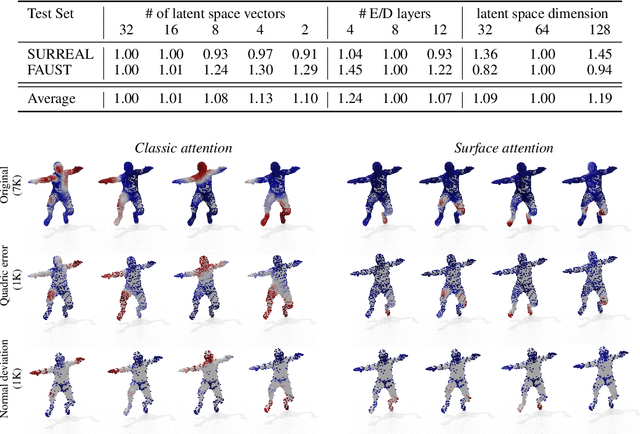
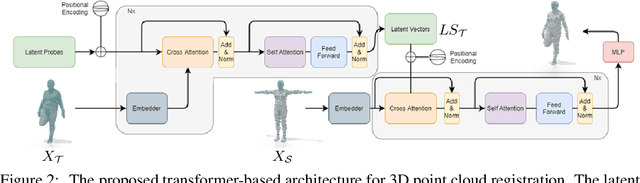
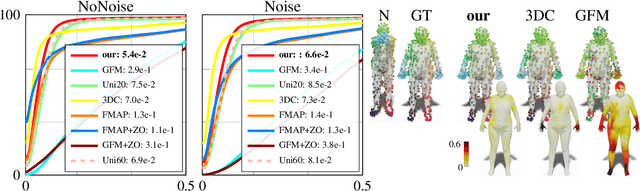
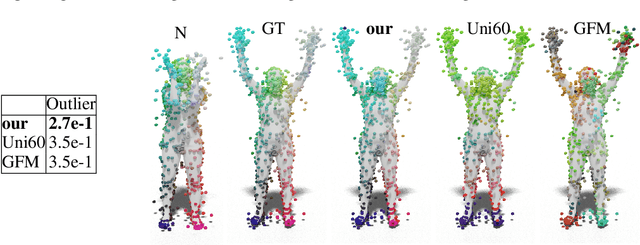
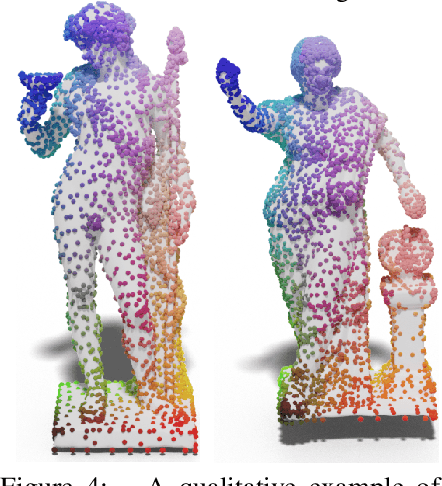
In this paper, we propose a transformer-based procedure for the efficient registration of non-rigid 3D point clouds. The proposed approach is data-driven and adopts for the first time the transformer architecture in the registration task. Our method is general and applies to different settings. Given a fixed template with some desired properties (e.g. skinning weights or other animation cues), we can register raw acquired data to it, thereby transferring all the template properties to the input geometry. Alternatively, given a pair of shapes, our method can register the first onto the second (or vice-versa), obtaining a high-quality dense correspondence between the two. In both contexts, the quality of our results enables us to target real applications such as texture transfer and shape interpolation. Furthermore, we also show that including an estimation of the underlying density of the surface eases the learning process. By exploiting the potential of this architecture, we can train our model requiring only a sparse set of ground truth correspondences ($10\sim20\%$ of the total points). The proposed model and the analysis that we perform pave the way for future exploration of transformer-based architectures for registration and matching applications. Qualitative and quantitative evaluations demonstrate that our pipeline outperforms state-of-the-art methods for deformable and unordered 3D data registration on different datasets and scenarios.
Universal Spectral Adversarial Attacks for Deformable Shapes
Apr 07, 2021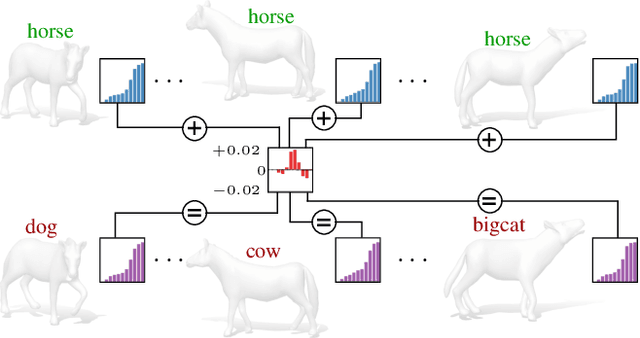
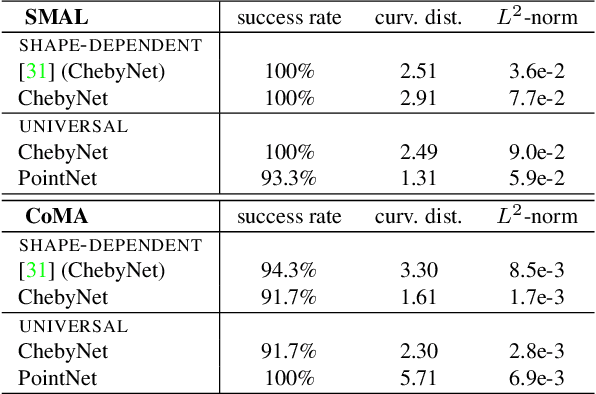
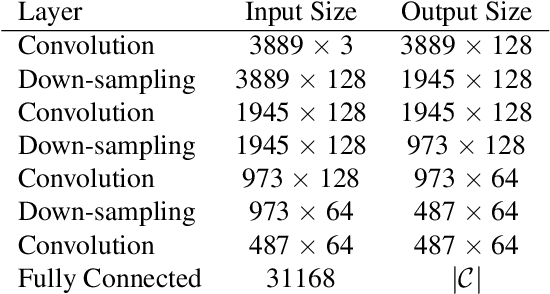
Machine learning models are known to be vulnerable to adversarial attacks, namely perturbations of the data that lead to wrong predictions despite being imperceptible. However, the existence of "universal" attacks (i.e., unique perturbations that transfer across different data points) has only been demonstrated for images to date. Part of the reason lies in the lack of a common domain, for geometric data such as graphs, meshes, and point clouds, where a universal perturbation can be defined. In this paper, we offer a change in perspective and demonstrate the existence of universal attacks for geometric data (shapes). We introduce a computational procedure that operates entirely in the spectral domain, where the attacks take the form of small perturbations to short eigenvalue sequences; the resulting geometry is then synthesized via shape-from-spectrum recovery. Our attacks are universal, in that they transfer across different shapes, different representations (meshes and point clouds), and generalize to previously unseen data.
Spectral Unions of Partial Deformable 3D Shapes
Mar 31, 2021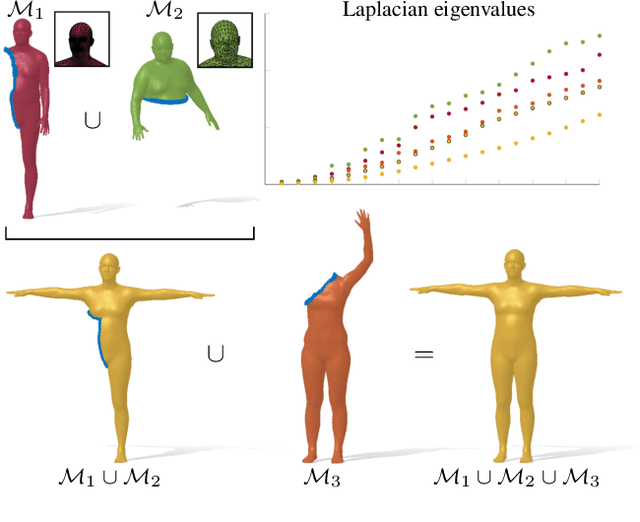
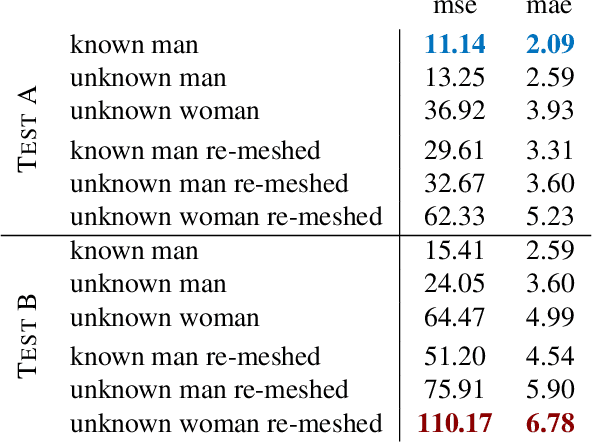
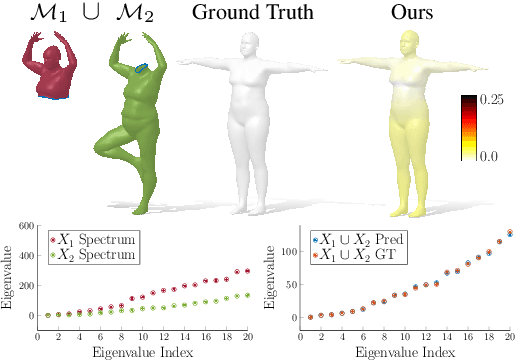
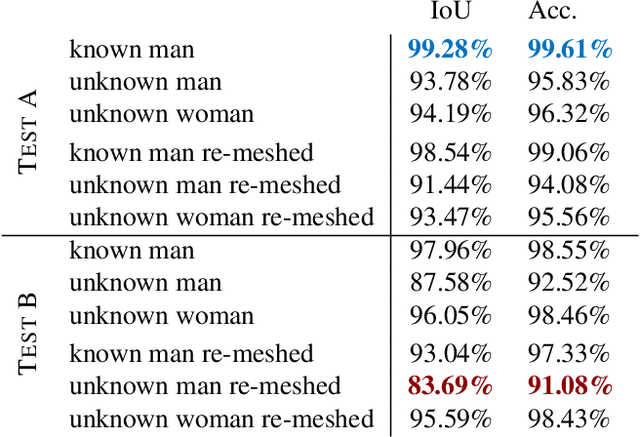
Spectral geometric methods have brought revolutionary changes to the field of geometry processing -- however, when the data to be processed exhibits severe partiality, such methods fail to generalize. As a result, there exists a big performance gap between methods dealing with complete shapes, and methods that address missing geometry. In this paper, we propose a possible way to fill this gap. We introduce the first method to compute compositions of non-rigidly deforming shapes, without requiring to solve first for a dense correspondence between the given partial shapes. We do so by operating in a purely spectral domain, where we define a union operation between short sequences of eigenvalues. Working with eigenvalues allows to deal with unknown correspondence, different sampling, and different discretization (point clouds and meshes alike), making this operation especially robust and general. Our approach is data-driven, and can generalize to isometric and non-isometric deformations of the surface, as long as these stay within the same semantic class (e.g., human bodies), as well as to partiality artifacts not seen at training time.
Learning disentangled representations via product manifold projection
Mar 02, 2021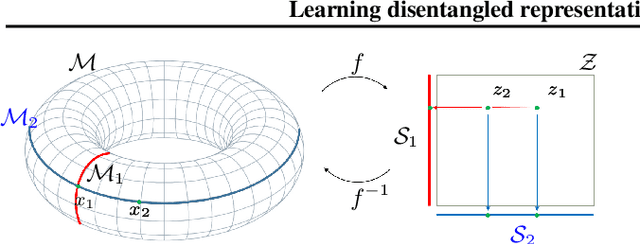
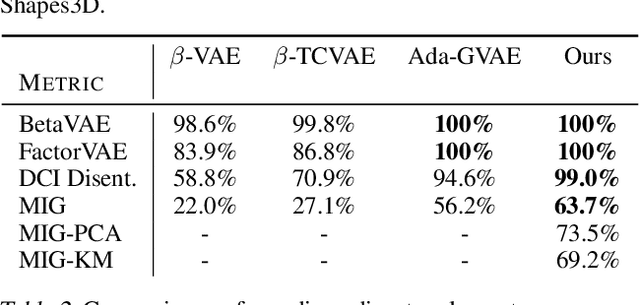
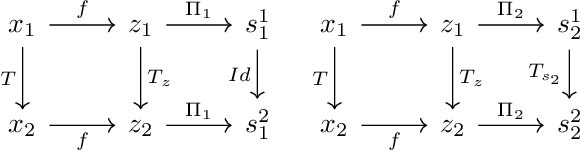
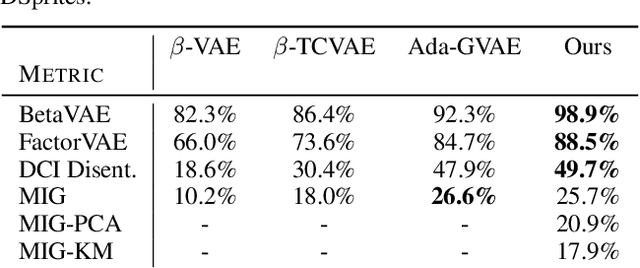
We propose a novel approach to disentangle the generative factors of variation underlying a given set of observations. Our method builds upon the idea that the (unknown) low-dimensional manifold underlying the data space can be explicitly modeled as a product of submanifolds. This gives rise to a new definition of disentanglement, and to a novel weakly-supervised algorithm for recovering the unknown explanatory factors behind the data. At training time, our algorithm only requires pairs of non i.i.d. data samples whose elements share at least one, possibly multidimensional, generative factor of variation. We require no knowledge on the nature of these transformations, and do not make any limiting assumption on the properties of each subspace. Our approach is easy to implement, and can be successfully applied to different kinds of data (from images to 3D surfaces) undergoing arbitrary transformations. In addition to standard synthetic benchmarks, we showcase our method in challenging real-world applications, where we compare favorably with the state of the art.
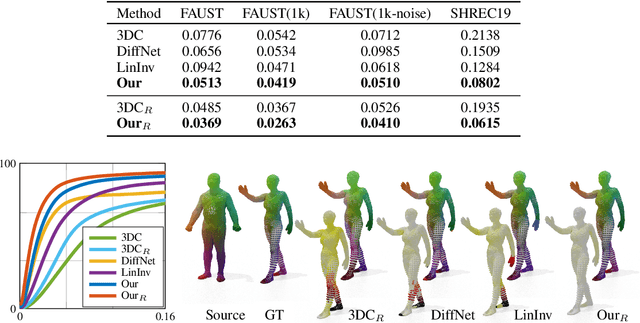
Correspondence Learning via Linearly-invariant Embedding
Oct 25, 2020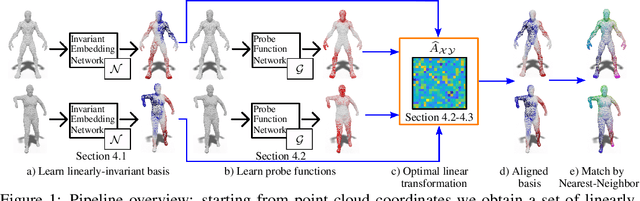
In this paper, we propose a fully differentiable pipeline for estimating accurate dense correspondences between 3D point clouds. The proposed pipeline is an extension and a generalization of the functional maps framework. However, instead of using the Laplace-Beltrami eigenfunctions as done in virtually all previous works in this domain, we demonstrate that learning the basis from data can both improve robustness and lead to better accuracy in challenging settings. We interpret the basis as a learned embedding into a higher dimensional space. Following the functional map paradigm the optimal transformation in this embedding space must be linear and we propose a separate architecture aimed at estimating the transformation by learning optimal descriptor functions. This leads to the first end-to-end trainable functional map-based correspondence approach in which both the basis and the descriptors are learned from data. Interestingly, we also observe that learning a \emph{canonical} embedding leads to worse results, suggesting that leaving an extra linear degree of freedom to the embedding network gives it more robustness, thereby also shedding light onto the success of previous methods. Finally, we demonstrate that our approach achieves state-of-the-art results in challenging non-rigid 3D point cloud correspondence applications.
High-Resolution Augmentation for Automatic Template-Based Matching of Human Models
Sep 19, 2020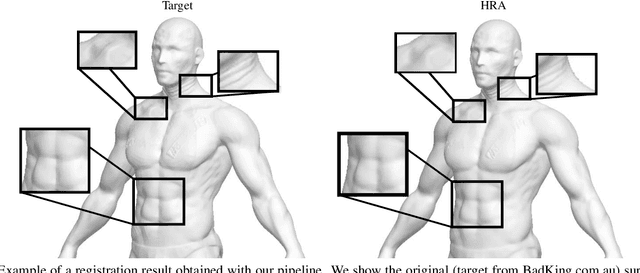
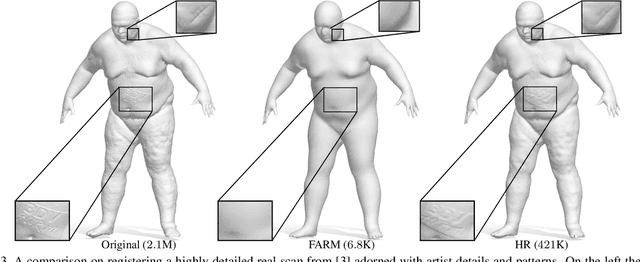
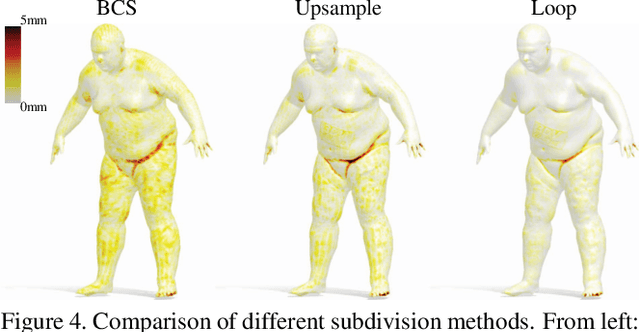
We propose a new approach for 3D shape matching of deformable human shapes. Our approach is based on the joint adoption of three different tools: an intrinsic spectral matching pipeline, a morphable model, and an extrinsic details refinement. By operating in conjunction, these tools allow us to greatly improve the quality of the matching while at the same time resolving the key issues exhibited by each tool individually. In this paper we present an innovative High-Resolution Augmentation (HRA) strategy that enables highly accurate correspondence even in the presence of significant mesh resolution mismatch between the input shapes. This augmentation provides an effective workaround for the resolution limitations imposed by the adopted morphable model. The HRA in its global and localized versions represents a novel refinement strategy for surface subdivision methods. We demonstrate the accuracy of the proposed pipeline on multiple challenging benchmarks, and showcase its effectiveness in surface registration and texture transfer.
Infinite Feature Selection: A Graph-based Feature Filtering Approach
Jun 15, 2020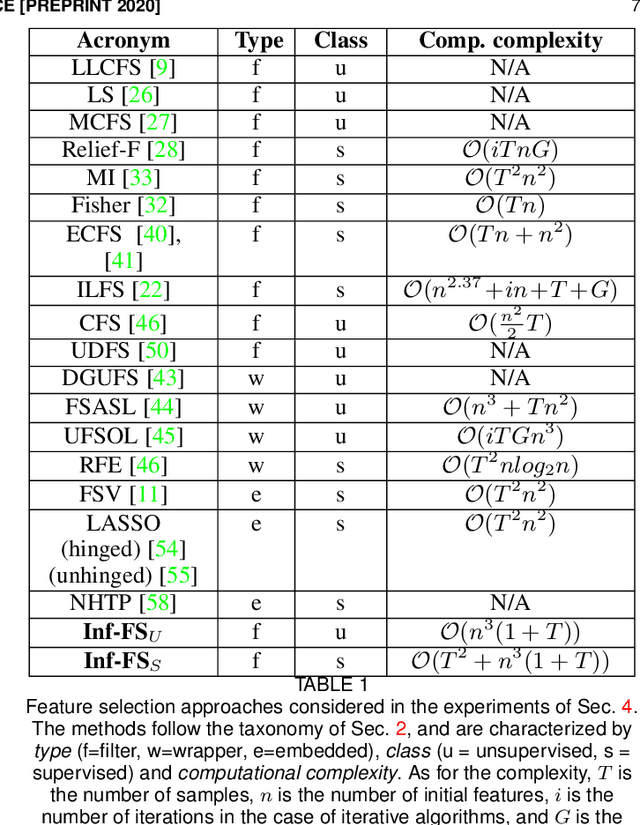
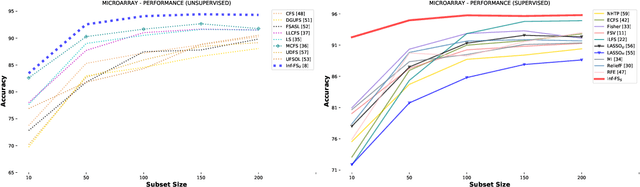
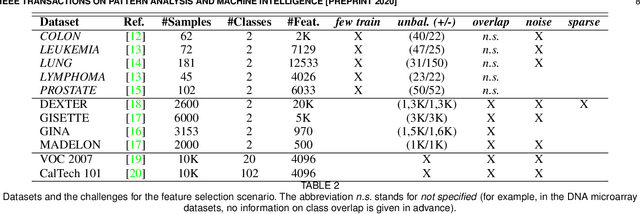
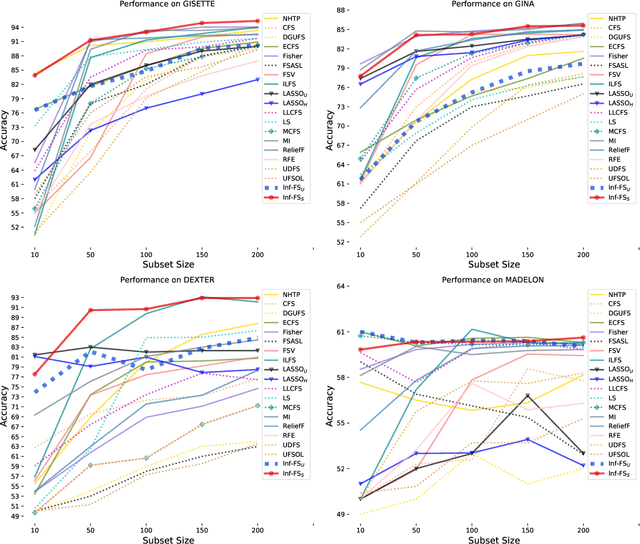
We propose a filtering feature selection framework that considers subsets of features as paths in a graph, where a node is a feature and an edge indicates pairwise (customizable) relations among features, dealing with relevance and redundancy principles. By two different interpretations (exploiting properties of power series of matrices and relying on Markov chains fundamentals) we can evaluate the values of paths (i.e., feature subsets) of arbitrary lengths, eventually go to infinite, from which we dub our framework Infinite Feature Selection (Inf-FS). Going to infinite allows to constrain the computational complexity of the selection process, and to rank the features in an elegant way, that is, considering the value of any path (subset) containing a particular feature. We also propose a simple unsupervised strategy to cut the ranking, so providing the subset of features to keep. In the experiments, we analyze diverse settings with heterogeneous features, for a total of 11 benchmarks, comparing against 18 widely-known comparative approaches. The results show that Inf-FS behaves better in almost any situation, that is, when the number of features to keep are fixed a priori, or when the decision of the subset cardinality is part of the process.
* TPAMI PREPRINT 2020
Instant recovery of shape from spectrum via latent space connections
Apr 19, 2020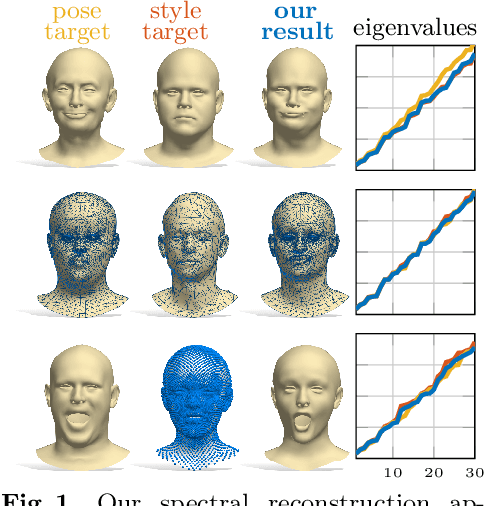
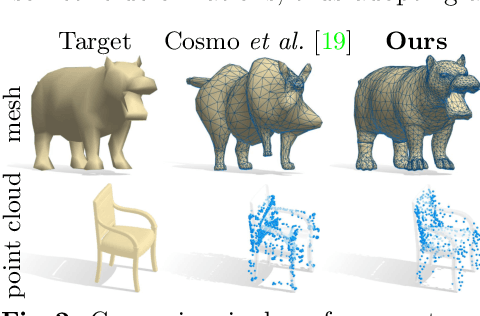
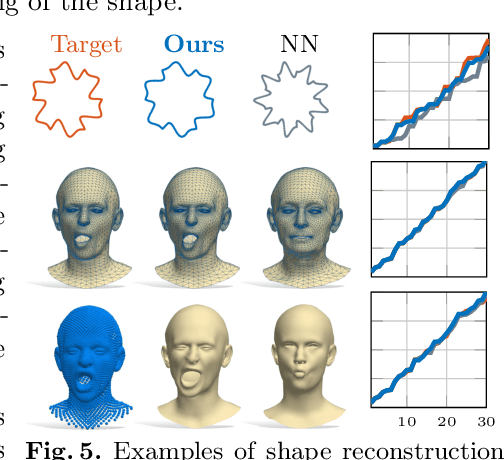
We introduce the first learning-based method for recovering shapes from Laplacian spectra. Given an auto-encoder, our model takes the form of a cycle-consistent module to map latent vectors to sequences of eigenvalues. This module provides an efficient and effective linkage between spectrum and geometry of a given shape. Our data-driven approach replaces the need for ad-hoc regularizers required by prior methods, while providing more accurate results at a fraction of the computational cost. Our learning model applies without modifications across different dimensions (2D and 3D shapes alike), representations (meshes, contours and point clouds), as well as across different shape classes, and admits arbitrary resolution of the input spectrum without affecting complexity. The increased flexibility allows us to provide a proxy to differentiable eigendecomposition and to address notoriously difficult tasks in 3D vision and geometry processing within a unified framework, including shape generation from spectrum, mesh super-resolution, shape exploration, style transfer, spectrum estimation from point clouds, segmentation transfer and point-to-point matching.