 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphology-Consistent Humanoid Interaction through Robot-Centric Video Synthesis
Mar 20, 2026Equipping humanoid robots with versatile interaction skills typically requires either extensive policy training or explicit human-to-robot motion retargeting. However, learning-based policies face prohibitive data collection costs. Meanwhile, retargeting relies on human-centric pose estimation (e.g., SMPL), introducing a morphology gap. Skeletal scale mismatches result in severe spatial misalignments when mapped to robots, compromising interaction success. In this work, we propose Dream2Act, a robot-centric framework enabling zero-shot interaction through generative video synthesis. Given a third-person image of the robot and target object, our framework leverages video generation models to envision the robot completing the task with morphology-consistent motion. We employ a high-fidelity pose extraction system to recover physically feasible, robot-native joint trajectories from these synthesized dreams, subsequently executed via a general-purpose whole-body controller. Operating strictly within the robot-native coordinate space, Dream2Act avoids retargeting errors and eliminates task-specific policy training. We evaluate Dream2Act on the Unitree G1 across four whole-body mobile interaction tasks: ball kicking, sofa sitting, bag punching, and box hugging. Dream2Act achieves a 37.5% overall success rate, compared to 0% for conventional retargeting. While retargeting fails to establish correct physical contacts due to the morphology gap (with errors compounded during locomotion), Dream2Act maintains robot-consistent spatial alignment, enabling reliable contact formation and substantially higher task completion.
Specification Generation for Neural Networks in Systems
Dec 04, 2024



Specifications - precise mathematical representations of correct domain-specific behaviors - are crucial to guarantee the trustworthiness of computer systems. With the increasing development of neural networks as computer system components, specifications gain more importance as they can be used to regulate the behaviors of these black-box models. Traditionally, specifications are designed by domain experts based on their intuition of correct behavior. However, this is labor-intensive and hence not a scalable approach as computer system applications diversify. We hypothesize that the traditional (aka reference) algorithms that neural networks replace for higher performance can act as effective proxies for correct behaviors of the models, when available. This is because they have been used and tested for long enough to encode several aspects of the trustworthy/correct behaviors in the underlying domain. Driven by our hypothesis, we develop a novel automated framework, SpecTRA to generate specifications for neural networks using references. We formulate specification generation as an optimization problem and solve it with observations of reference behaviors. SpecTRA clusters similar observations into compact specifications. We present specifications generated by SpecTRA for neural networks in adaptive bit rate and congestion control algorithms. Our specifications show evidence of being correct and matching intuition. Moreover, we use our specifications to show several unknown vulnerabilities of the SOTA models for computer systems.
COVID-19 Detection in Chest X-ray Images Using Swin-Transformer and Transformer in Transformer
Oct 16, 2021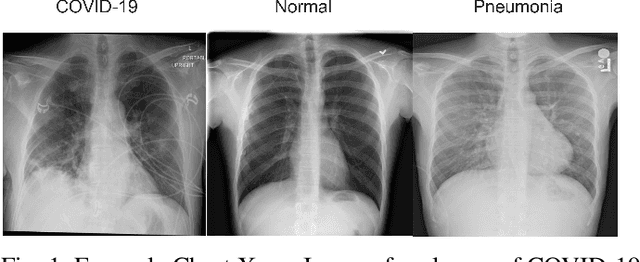

The Coronavirus Disease 2019 (COVID-19) has spread globally and caused serious damages. Chest X-ray images are widely used for COVID-19 diagnosis and Artificial Intelligence method can assist to increase the efficiency and accuracy. In the Challenge of Chest XR COVID-19 detection in Ethics and Explainability for Responsible Data Science (EE-RDS) conference 2021, we proposed a method which combined Swin Transformer and Transformer in Transformer to classify chest X-ray images as three classes: COVID-19, Pneumonia and Normal (healthy) and achieved 0.9475 accuracy on test set.