 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMATT-Diff: Multimodal Active Target Tracking by Diffusion Policy
Nov 14, 2025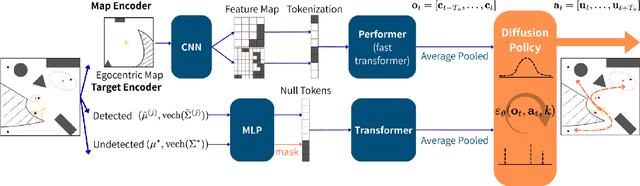
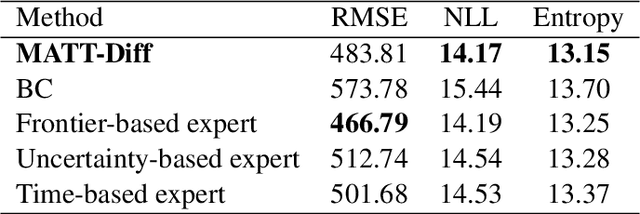
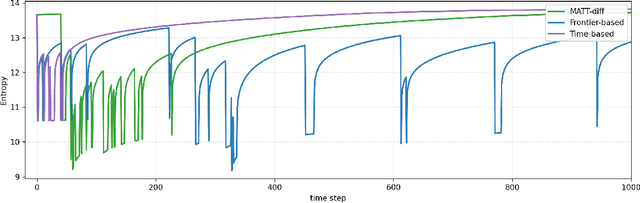
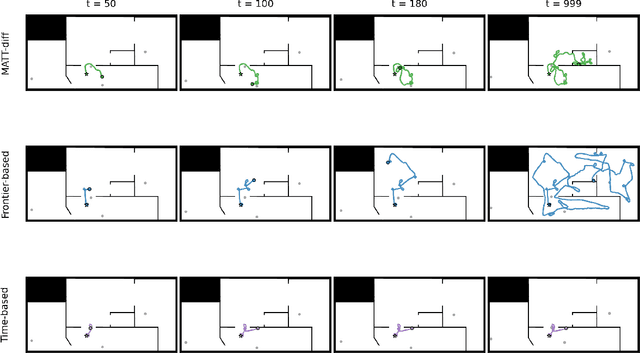
This paper proposes MATT-Diff: Multi-Modal Active Target Tracking by Diffusion Policy, a control policy that captures multiple behavioral modes - exploration, dedicated tracking, and target reacquisition - for active multi-target tracking. The policy enables agent control without prior knowledge of target numbers, states, or dynamics. Effective target tracking demands balancing exploration for undetected or lost targets with following the motion of detected but uncertain ones. We generate a demonstration dataset from three expert planners including frontier-based exploration, an uncertainty-based hybrid planner switching between frontier-based exploration and RRT* tracking based on target uncertainty, and a time-based hybrid planner switching between exploration and tracking based on target detection time. We design a control policy utilizing a vision transformer for egocentric map tokenization and an attention mechanism to integrate variable target estimates represented by Gaussian densities. Trained as a diffusion model, the policy learns to generate multi-modal action sequences through a denoising process. Evaluations demonstrate MATT-Diff's superior tracking performance against expert and behavior cloning baselines across multiple target motions, empirically validating its advantages in target tracking.
Control Strategies for Pursuit-Evasion Under Occlusion Using Visibility and Safety Barrier Functions
Nov 02, 2024



This paper develops a control strategy for pursuit-evasion problems in environments with occlusions. We address the challenge of a mobile pursuer keeping a mobile evader within its field of view (FoV) despite line-of-sight obstructions. The signed distance function (SDF) of the FoV is used to formulate visibility as a control barrier function (CBF) constraint on the pursuer's control inputs. Similarly, obstacle avoidance is formulated as a CBF constraint based on the SDF of the obstacle set. While the visibility and safety CBFs are Lipschitz continuous, they are not differentiable everywhere, necessitating the use of generalized gradients. To achieve non-myopic pursuit, we generate reference control trajectories leading to evader visibility using a sampling-based kinodynamic planner. The pursuer then tracks this reference via convex optimization under the CBF constraints. We validate our approach in CARLA simulations and real-world robot experiments, demonstrating successful visibility maintenance using only onboard sensing, even under severe occlusions and dynamic evader movements.
Policy Learning for Active Target Tracking over Continuous SE(3) Trajectories
Dec 03, 2022


This paper proposes a novel model-based policy gradient algorithm for tracking dynamic targets using a mobile robot, equipped with an onboard sensor with limited field of view. The task is to obtain a continuous control policy for the mobile robot to collect sensor measurements that reduce uncertainty in the target states, measured by the target distribution entropy. We design a neural network control policy with the robot $SE(3)$ pose and the mean vector and information matrix of the joint target distribution as inputs and attention layers to handle variable numbers of targets. We also derive the gradient of the target entropy with respect to the network parameters explicitly, allowing efficient model-based policy gradient optimization.
Learning Continuous Control Policies for Information-Theoretic Active Perception
Sep 26, 2022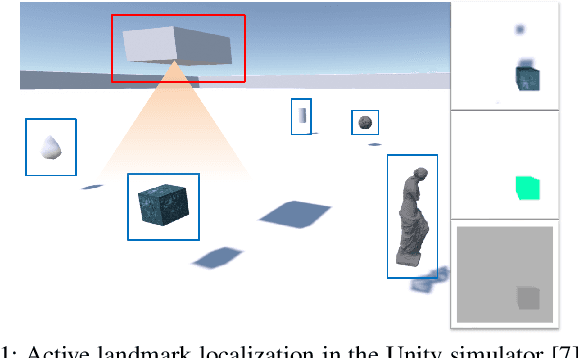
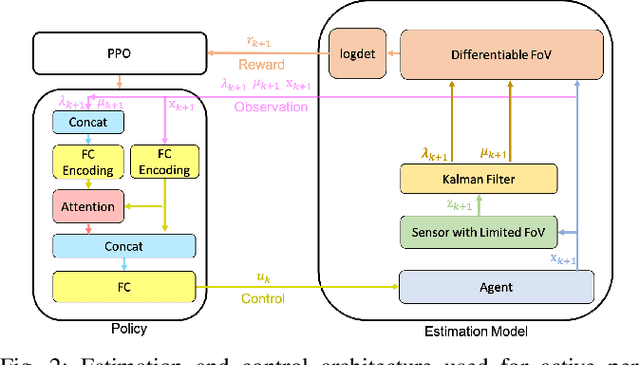
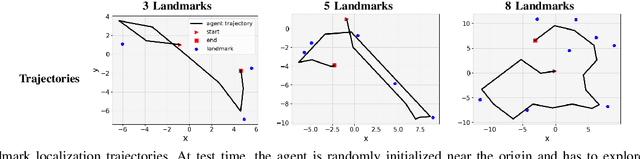
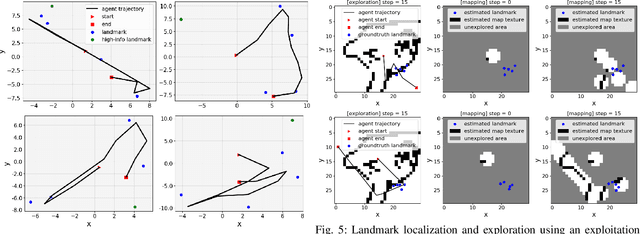
This paper proposes a method for learning continuous control policies for active landmark localization and exploration using an information-theoretic cost. We consider a mobile robot detecting landmarks within a limited sensing range, and tackle the problem of learning a control policy that maximizes the mutual information between the landmark states and the sensor observations. We employ a Kalman filter to convert the partially observable problem in the landmark state to Markov decision process (MDP), a differentiable field of view to shape the reward, and an attention-based neural network to represent the control policy. The approach is further unified with active volumetric mapping to promote exploration in addition to landmark localization. The performance is demonstrated in several simulated landmark localization tasks in comparison with benchmark methods.
Active Mapping via Gradient Ascent Optimization of Shannon Mutual Information over Continuous SE(3) Trajectories
Apr 15, 2022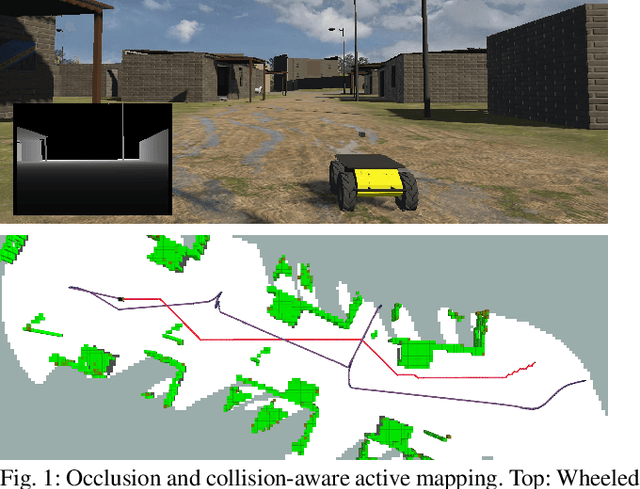
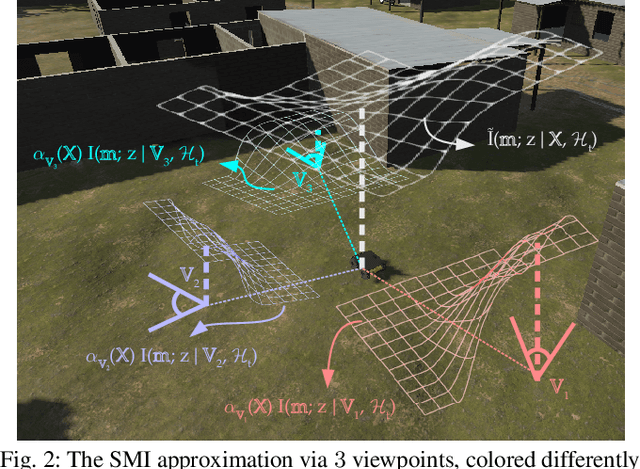
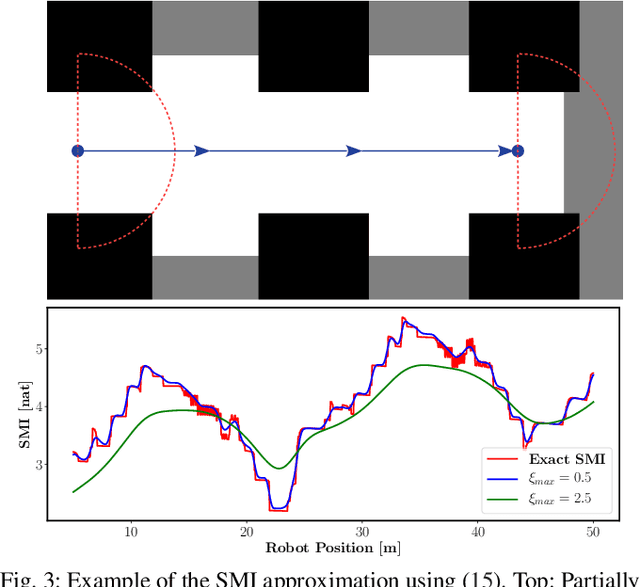
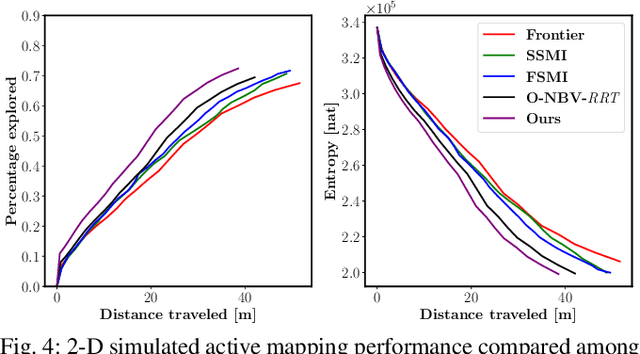
The problem of active mapping aims to plan an informative sequence of sensing views given a limited budget such as distance traveled. This paper consider active occupancy grid mapping using a range sensor, such as LiDAR or depth camera. State-of-the-art methods optimize information-theoretic measures relating the occupancy grid probabilities with the range sensor measurements. The non-smooth nature of ray-tracing within a grid representation makes the objective function non-differentiable, forcing existing methods to search over a discrete space of candidate trajectories. This work proposes a differentiable approximation of the Shannon mutual information between a grid map and ray-based observations that enables gradient ascent optimization in the continuous space of SE(3) sensor poses. Our gradient-based formulation leads to more informative sensing trajectories, while avoiding occlusions and collisions. The proposed method is demonstrated in simulated and real-world experiments in 2-D and 3-D environments.
Active SLAM over Continuous Trajectory and Control: A Covariance-Feedback Approach
Oct 14, 2021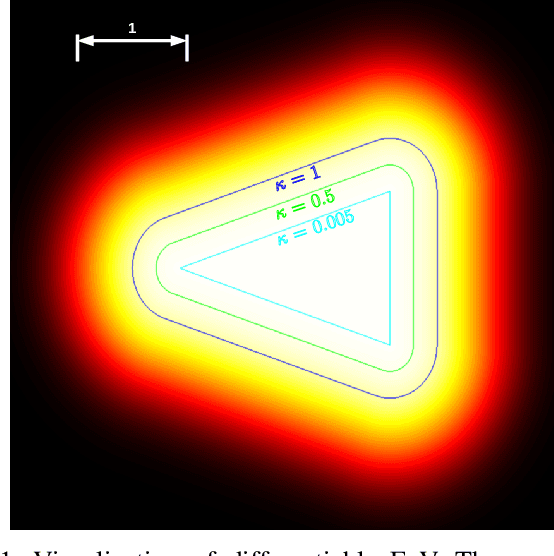
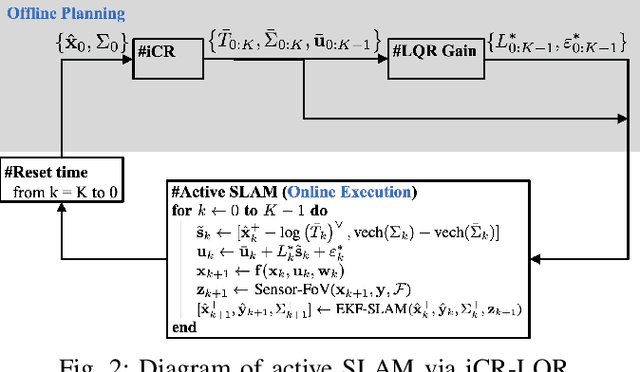
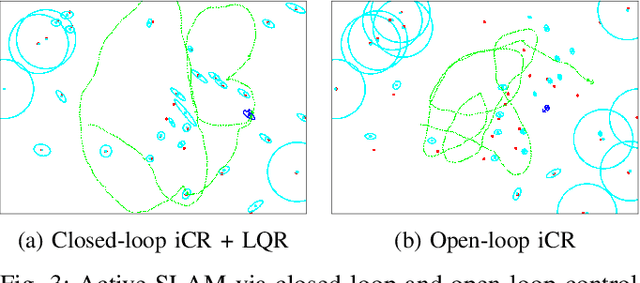
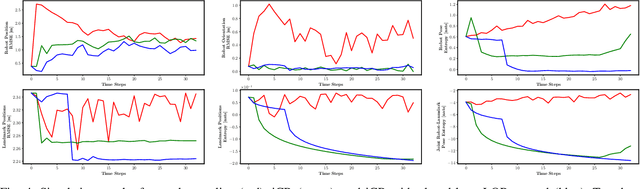
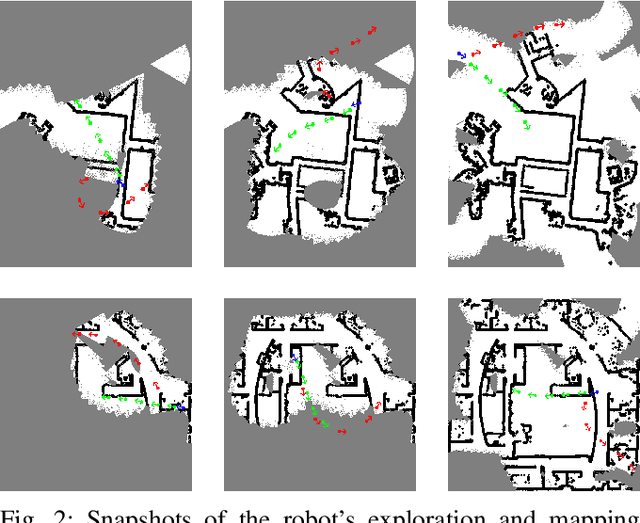
This paper proposes a novel active Simultaneous Localization and Mapping (SLAM) method with continuous trajectory optimization over a stochastic robot dynamics model. The problem is formalized as a stochastic optimal control over the continuous robot kinematic model to minimize a cost function that involves the covariance matrix of the landmark states. We tackle the problem by separately obtaining an open-loop control sequence subject to deterministic dynamics by iterative Covariance Regulation (iCR) and a closed-loop feedback control under stochastic robot and covariance dynamics by Linear Quadratic Regulator (LQR). The proposed optimization method captures the coupling between localization and mapping in predicting uncertainty evolution and synthesizes highly informative sensing trajectories. We demonstrate its performance in active landmark-based SLAM using relative-position measurements with a limited field of view.
Active Exploration and Mapping via Iterative Covariance Regulation over Continuous $SE(3)$ Trajectories
Mar 10, 2021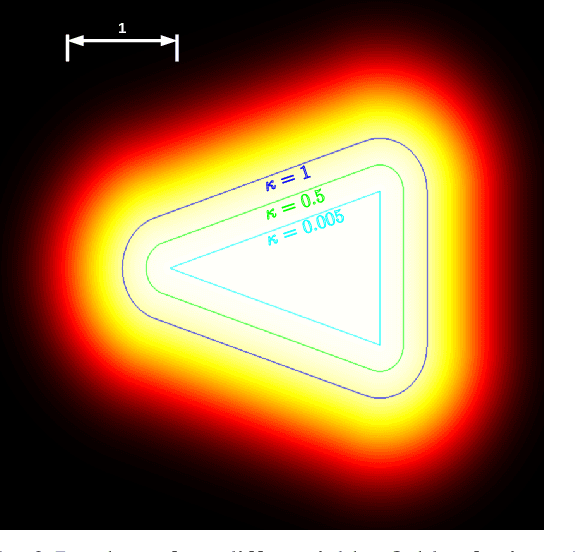
This paper develops \emph{iterative Covariance Regulation} (iCR), a novel method for active exploration and mapping for a mobile robot equipped with on-board sensors. The problem is posed as optimal control over the $SE(3)$ pose kinematics of the robot to minimize the differential entropy of the map conditioned the potential sensor observations. We introduce a differentiable field of view formulation, and derive iCR via the gradient descent method to iteratively update an open-loop control sequence in continuous space so that the covariance of the map estimate is minimized. We demonstrate autonomous exploration and uncertainty reduction in simulated occupancy grid environments.