 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking neural surrogates on realistic spatiotemporal multiphysics flows
Dec 21, 2025Predicting multiphysics dynamics is computationally expensive and challenging due to the severe coupling of multi-scale, heterogeneous physical processes. While neural surrogates promise a paradigm shift, the field currently suffers from an "illusion of mastery", as repeatedly emphasized in top-tier commentaries: existing evaluations overly rely on simplified, low-dimensional proxies, which fail to expose the models' inherent fragility in realistic regimes. To bridge this critical gap, we present REALM (REalistic AI Learning for Multiphysics), a rigorous benchmarking framework designed to test neural surrogates on challenging, application-driven reactive flows. REALM features 11 high-fidelity datasets spanning from canonical multiphysics problems to complex propulsion and fire safety scenarios, alongside a standardized end-to-end training and evaluation protocol that incorporates multiphysics-aware preprocessing and a robust rollout strategy. Using this framework, we systematically benchmark over a dozen representative surrogate model families, including spectral operators, convolutional models, Transformers, pointwise operators, and graph/mesh networks, and identify three robust trends: (i) a scaling barrier governed jointly by dimensionality, stiffness, and mesh irregularity, leading to rapidly growing rollout errors; (ii) performance primarily controlled by architectural inductive biases rather than parameter count; and (iii) a persistent gap between nominal accuracy metrics and physically trustworthy behavior, where models with high correlations still miss key transient structures and integral quantities. Taken together, REALM exposes the limits of current neural surrogates on realistic multiphysics flows and offers a rigorous testbed to drive the development of next-generation physics-aware architectures.
Heterogeneity Loss to Handle Intersubject and Intrasubject Variability in Cancer
Mar 19, 2020

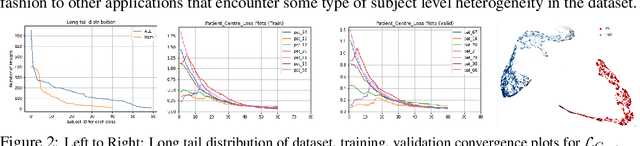
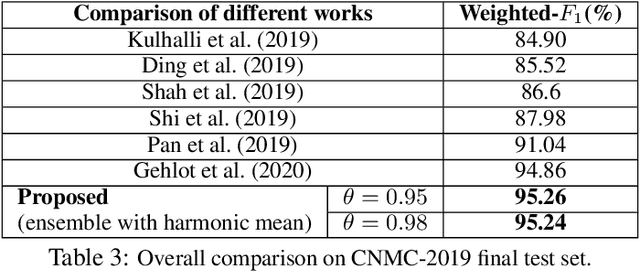
Developing nations lack adequate number of hospitals with modern equipment and skilled doctors. Hence, a significant proportion of these nations' population, particularly in rural areas, is not able to avail specialized and timely healthcare facilities. In recent years, deep learning (DL) models, a class of artificial intelligence (AI) methods, have shown impressive results in medical domain. These AI methods can provide immense support to developing nations as affordable healthcare solutions. This work is focused on one such application of blood cancer diagnosis. However, there are some challenges to DL models in cancer research because of the unavailability of a large data for adequate training and the difficulty of capturing heterogeneity in data at different levels ranging from acquisition characteristics, session, to subject-level (within subjects and across subjects). These challenges render DL models prone to overfitting and hence, models lack generalization on prospective subjects' data. In this work, we address these problems in the application of B-cell Acute Lymphoblastic Leukemia (B-ALL) diagnosis using deep learning. We propose heterogeneity loss that captures subject-level heterogeneity, thereby, forcing the neural network to learn subject-independent features. We also propose an unorthodox ensemble strategy that helps us in providing improved classification over models trained on 7-folds giving a weighted-$F_1$ score of 95.26% on unseen (test) subjects' data that are, so far, the best results on the C-NMC 2019 dataset for B-ALL classification.
Multi-lane Detection Using Instance Segmentation and Attentive Voting
Jan 01, 2020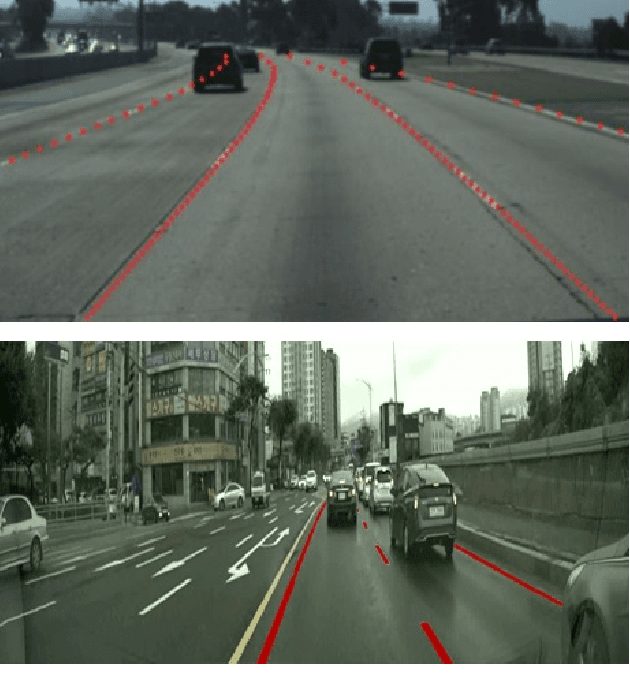
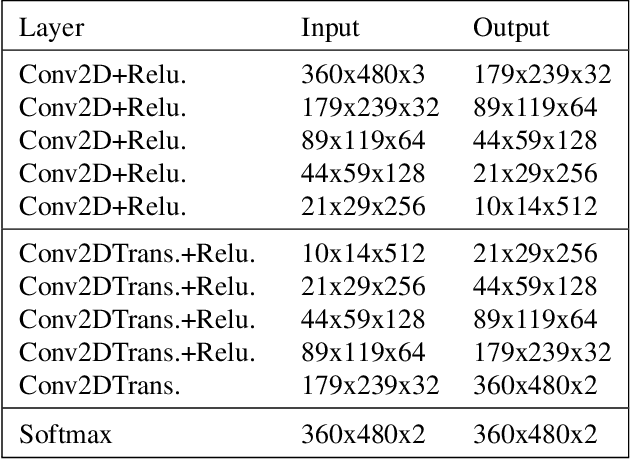
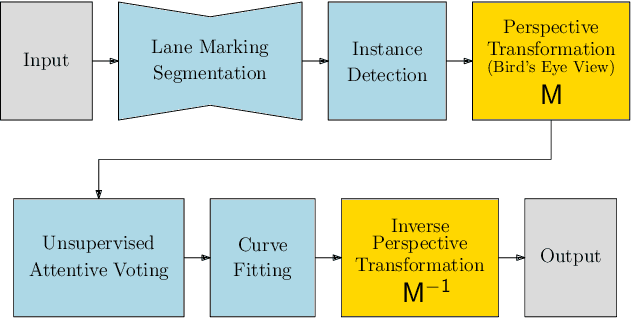
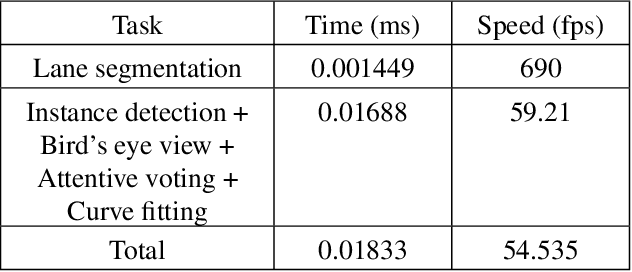
Autonomous driving is becoming one of the leading industrial research areas. Therefore many automobile companies are coming up with semi to fully autonomous driving solutions. Among these solutions, lane detection is one of the vital driver-assist features that play a crucial role in the decision-making process of the autonomous vehicle. A variety of solutions have been proposed to detect lanes on the road, which ranges from using hand-crafted features to the state-of-the-art end-to-end trainable deep learning architectures. Most of these architectures are trained in a traffic constrained environment. In this paper, we propose a novel solution to multi-lane detection, which outperforms state of the art methods in terms of both accuracy and speed. To achieve this, we also offer a dataset with a more intuitive labeling scheme as compared to other benchmark datasets. Using our approach, we are able to obtain a lane segmentation accuracy of 99.87% running at 54.53 fps (average).