 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile Radio Networks and Weather Radars Dualism: Rainfall Measurement Revolution in Densely Populated Areas
Mar 19, 2026This study demonstrates, for the first time, how a network of cellular base stations (BSs) - the infrastructure of mobile radio networks - can be used as a distributed opportunistic radar for rainfall remote sensing. By adapting signal-processing techniques traditionally employed in Doppler weather radar systems, we demonstrate that BS signals can be used to retrieve typical weather radar products, including reflectivity factor, mean Doppler velocity, and spectral width. Due to the high spatial density of BS infrastructure in urban environments, combined with intrinsic technical features such as electronically steerable antenna arrays and wide receiver bandwidths, the proposed approach achieves unprecedented spatial and temporal resolutions, on the order of a few meters and several tens of seconds, respectively. Despite limitations related to low transmitted power, limited antenna gain, and other system constraints, a major challenge arises from ground clutter contamination, which is exacerbated by the nearly horizontal orientation of BS antenna beams. This work provides a thorough assessment of clutter impact and demonstrates that, through appropriate processing, the resulting clutter-filtered radar moments reach a satisfactory level of quality when compared with raw observations and with measurements from independent BSs with overlapped field-of-views. The findings highlight a transformative opportunity for urban hydrometeorology: leveraging existing telecommunications infrastructure to obtain rainfall information with a level of spatial granularity and temporal immediacy like never before.
Motion Estimation and Compensation in Automotive MIMO SAR
Jan 25, 2022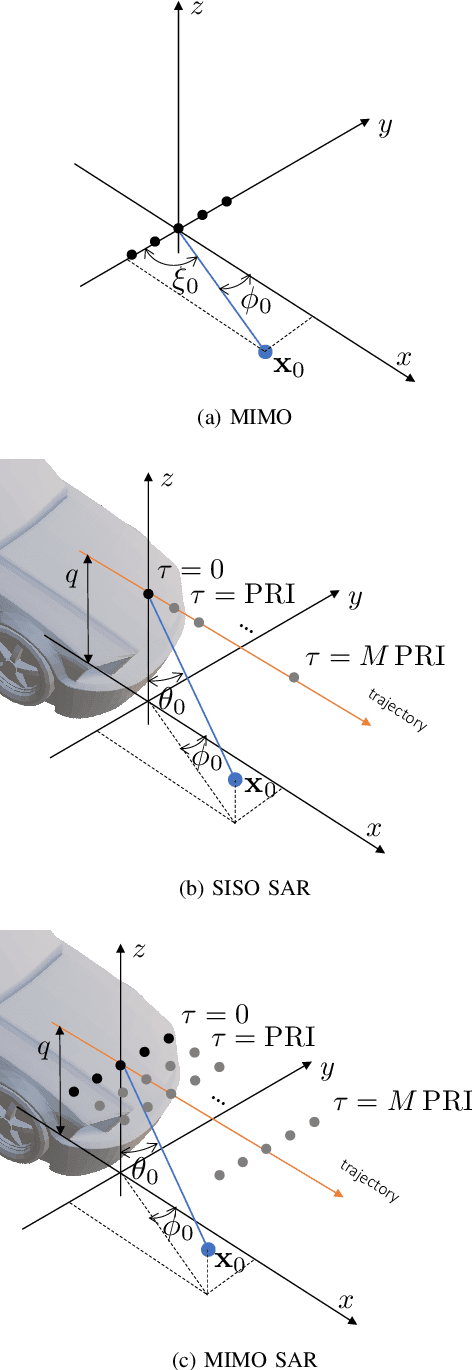
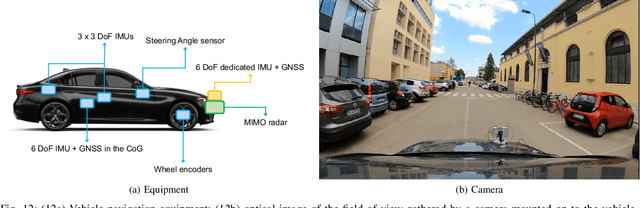
With the advent of self-driving vehicles, autonomous driving systems will have to rely on a vast number of heterogeneous sensors to perform dynamic perception of the surrounding environment. Synthetic Aperture Radar (SAR) systems increase the resolution of conventional mass-market radars by exploiting the vehicle's ego-motion, requiring a very accurate knowledge of the trajectory, usually not compatible with automotive-grade navigation systems. In this regard, this paper deals with the analysis, estimation and compensation of trajectory estimation errors in automotive SAR systems, proposing a complete residual motion estimation and compensation workflow. We start by defining the geometry of the acquisition and the basic processing steps of Multiple-Input Multiple-Output (MIMO) SAR systems. Then, we analytically derive the effects of typical motion errors in automotive SAR imaging. Based on the derived models, the procedure is detailed, outlining the guidelines for its practical implementation. We show the effectiveness of the proposed technique by means of experimental data gathered by a 77 GHz radar mounted in a forward looking configuration.