 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Open-Vocabulary Object Detection through Multi-Level Fine-Grained Visual-Language Alignment
Jan 31, 2026Traditional object detection systems are typically constrained to predefined categories, limiting their applicability in dynamic environments. In contrast, open-vocabulary object detection (OVD) enables the identification of objects from novel classes not present in the training set. Recent advances in visual-language modeling have led to significant progress of OVD. However, prior works face challenges in either adapting the single-scale image backbone from CLIP to the detection framework or ensuring robust visual-language alignment. We propose Visual-Language Detection (VLDet), a novel framework that revamps feature pyramid for fine-grained visual-language alignment, leading to improved OVD performance. With the VL-PUB module, VLDet effectively exploits the visual-language knowledge from CLIP and adapts the backbone for object detection through feature pyramid. In addition, we introduce the SigRPN block, which incorporates a sigmoid-based anchor-text contrastive alignment loss to improve detection of novel categories. Through extensive experiments, our approach achieves 58.7 AP for novel classes on COCO2017 and 24.8 AP on LVIS, surpassing all state-of-the-art methods and achieving significant improvements of 27.6% and 6.9%, respectively. Furthermore, VLDet also demonstrates superior zero-shot performance on closed-set object detection.
Learning Graph Neural Networks for Multivariate Time Series Anomaly Detection
Dec 07, 2021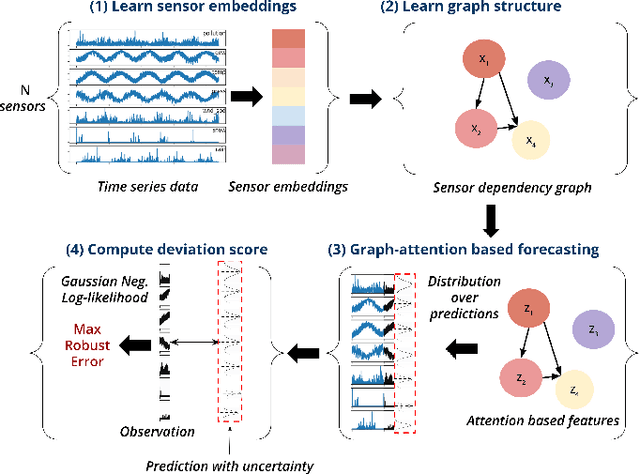
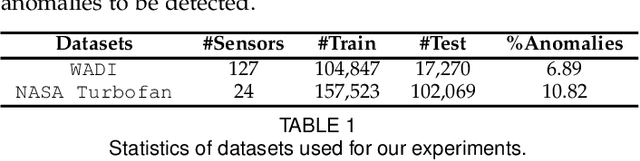
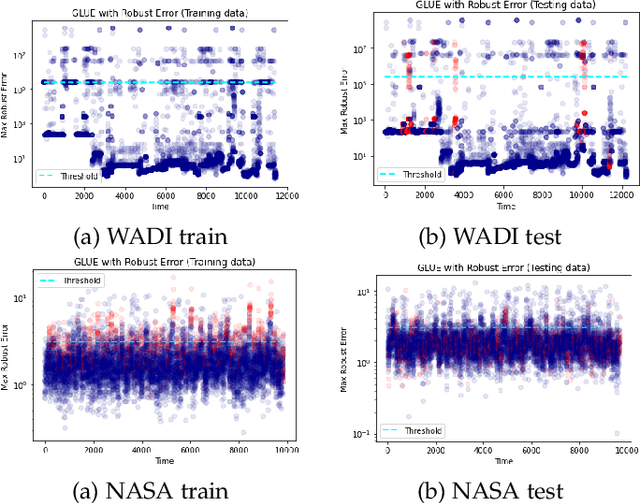
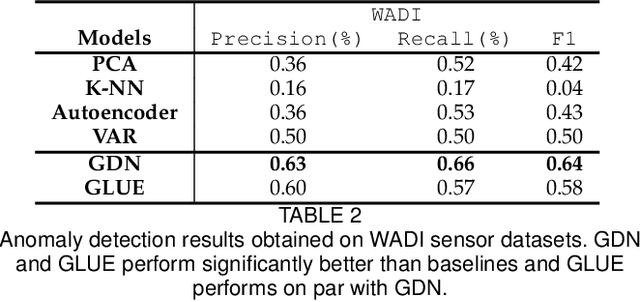
In this work, we propose GLUE (Graph Deviation Network with Local Uncertainty Estimation), building on the recently proposed Graph Deviation Network (GDN). GLUE not only automatically learns complex dependencies between variables and uses them to better identify anomalous behavior, but also quantifies its predictive uncertainty, allowing us to account for the variation in the data as well to have more interpretable anomaly detection thresholds. Results on two real world datasets tell us that optimizing the negative Gaussian log likelihood is reasonable because GLUE's forecasting results are at par with GDN and in fact better than the vector autoregressor baseline, which is significant given that GDN directly optimizes the MSE loss. In summary, our experiments demonstrate that GLUE is competitive with GDN at anomaly detection, with the added benefit of uncertainty estimations. We also show that GLUE learns meaningful sensor embeddings which clusters similar sensors together.