 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Deep Feature Selection for Pneumonia Detection: A Novel RegNet and XOR-Based PSO Approach
Aug 31, 2023Pneumonia remains a significant cause of child mortality, particularly in developing countries where resources and expertise are limited. The automated detection of Pneumonia can greatly assist in addressing this challenge. In this research, an XOR based Particle Swarm Optimization (PSO) is proposed to select deep features from the second last layer of a RegNet model, aiming to improve the accuracy of the CNN model on Pneumonia detection. The proposed XOR PSO algorithm offers simplicity by incorporating just one hyperparameter for initialization, and each iteration requires minimal computation time. Moreover, it achieves a balance between exploration and exploitation, leading to convergence on a suitable solution. By extracting 163 features, an impressive accuracy level of 98% was attained which demonstrates comparable accuracy to previous PSO-based methods. The source code of the proposed method is available in the GitHub repository.
Color Image Segmentation Using Multi-Objective Swarm Optimizer and Multi-level Histogram Thresholding
Oct 18, 2021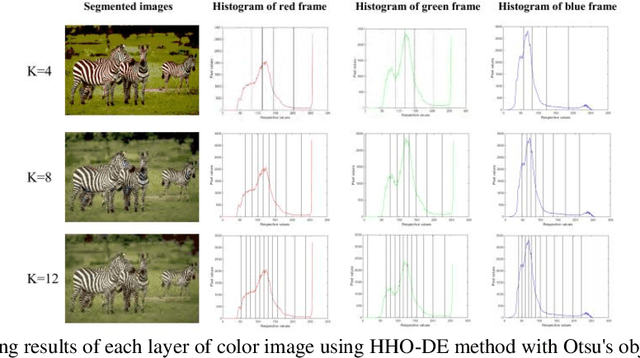
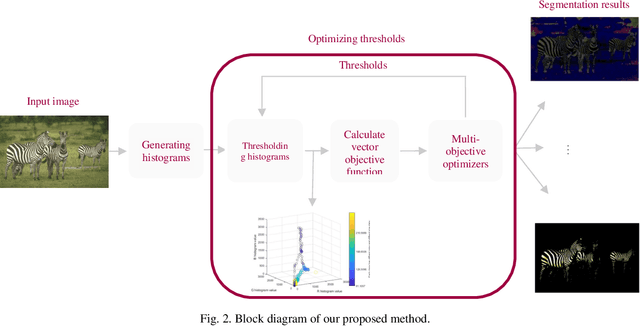
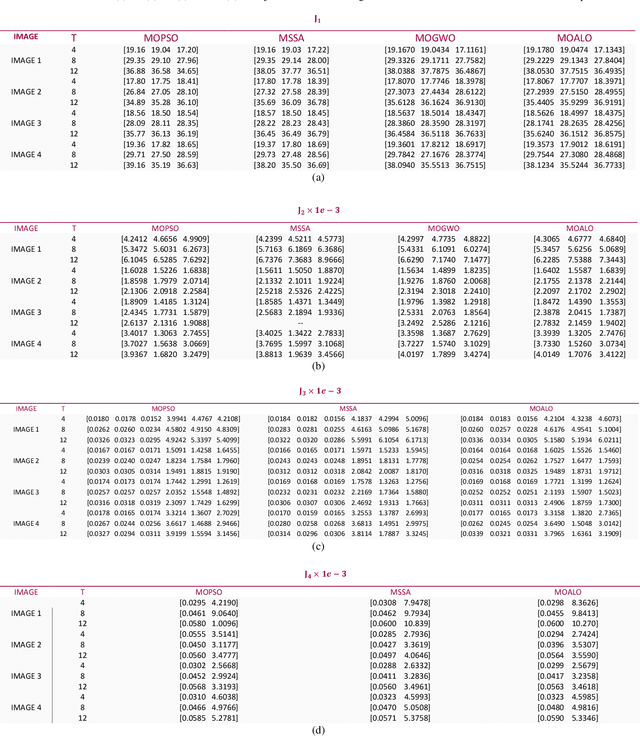
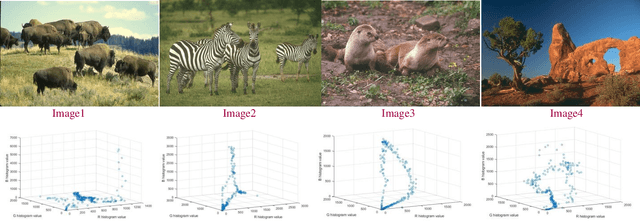
Rapid developments in swarm intelligence optimizers and computer processing abilities make opportunities to design more accurate, stable, and comprehensive methods for color image segmentation. This paper presents a new way for unsupervised image segmentation by combining histogram thresholding methods (Kapur's entropy and Otsu's method) and different multi-objective swarm intelligence algorithms (MOPSO, MOGWO, MSSA, and MOALO) to thresholding 3D histogram of a color image. More precisely, this method first combines the objective function of traditional thresholding algorithms to design comprehensive objective functions then uses multi-objective optimizers to find the best thresholds during the optimization of designed objective functions. Also, our method uses a vector objective function in 3D space that could simultaneously handle the segmentation of entire image color channels with the same thresholds. To optimize this vector objective function, we employ multiobjective swarm optimizers that can optimize multiple objective functions at the same time. Therefore, our method considers dependencies between channels to find the thresholds that satisfy objective functions of color channels (which we name as vector objective function) simultaneously. Segmenting entire color channels with the same thresholds also benefits from the fact that our proposed method needs fewer thresholds to segment the image than other thresholding algorithms; thus, it requires less memory space to save thresholds. It helps a lot when we want to segment many images to many regions. The subjective and objective results show the superiority of this method to traditional thresholding methods that separately threshold histograms of a color image.
Distributed Swarm Collision Avoidance Based on Angular Calculations
Aug 29, 2021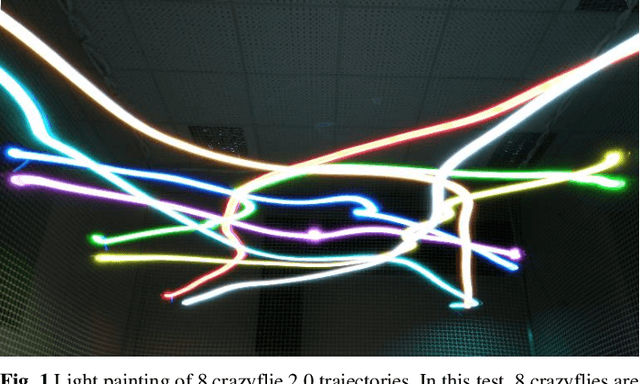
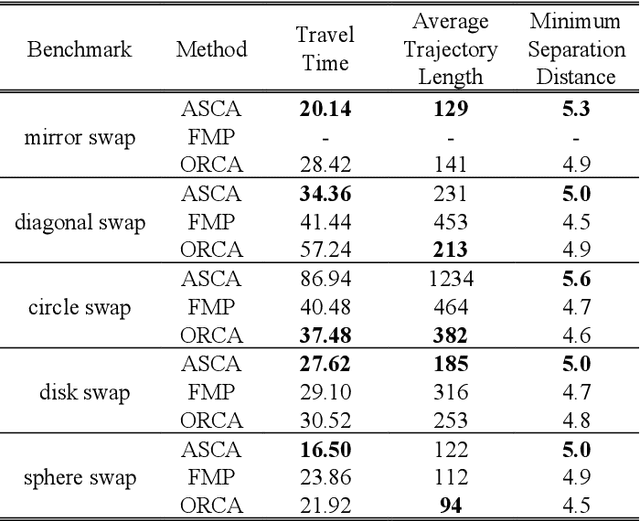
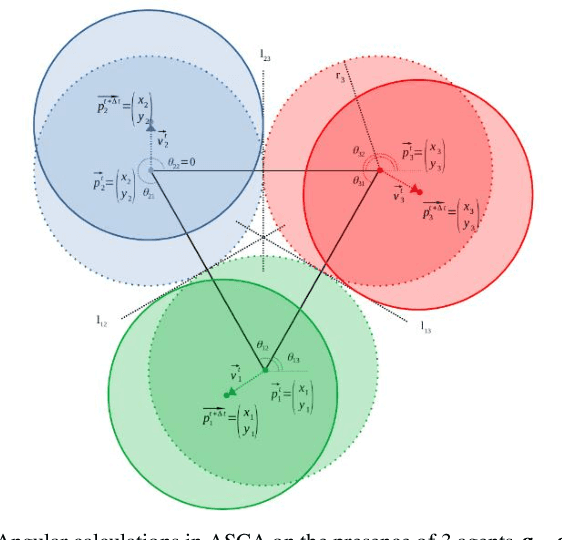
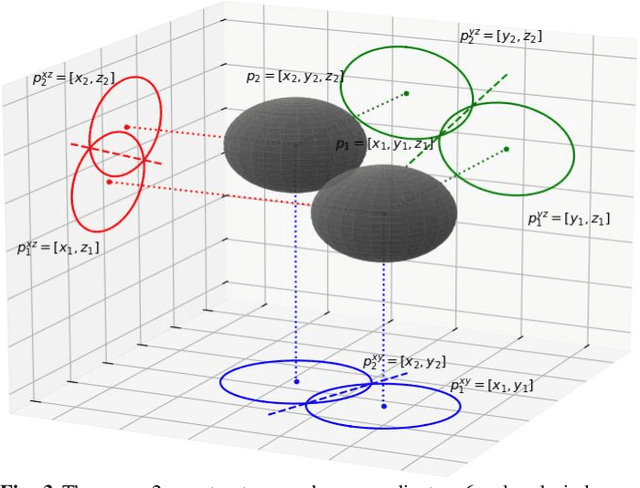
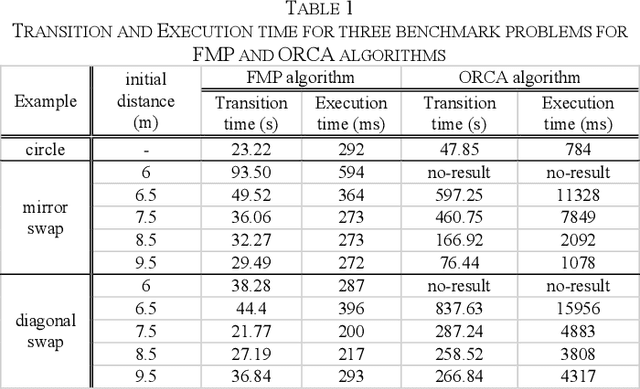
Collision avoidance is one of the most important topics in the robotics field. The goal is to move the robots from initial locations to target locations such that they follow shortest non-colliding paths in the shortest time and with the least amount of energy. In this paper, a distributed and real-time algorithm for dense and complex 2D and 3D environments is proposed. This algorithm uses angular calculations to select the optimal direction for the movement of each robot and it has been shown that these separate calculations lead to a form of cooperative behavior among agents. We evaluated the proposed approach on various simulation and experimental scenarios and compared the results with FMP and ORCA, two important algorithms in this field. The results show that the proposed approach is at least 25% faster than ORCA and at least 7% faster than FMP and also more reliable than both methods. The proposed method is shown to enable fully autonomous navigation of a swarm of crazyflies.
Multi-agent Motion Planning for Dense and Dynamic Environments via Deep Reinforcement Learning
Jan 18, 2020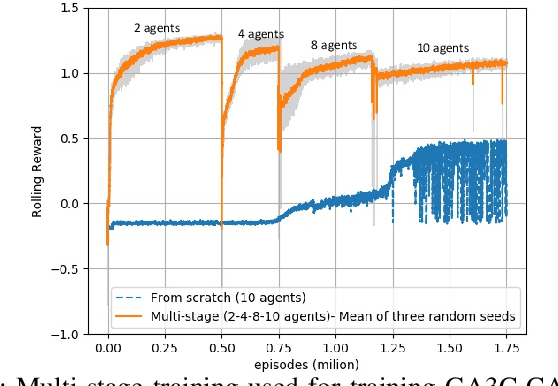
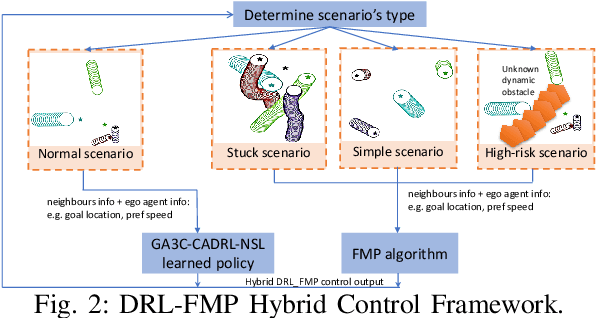
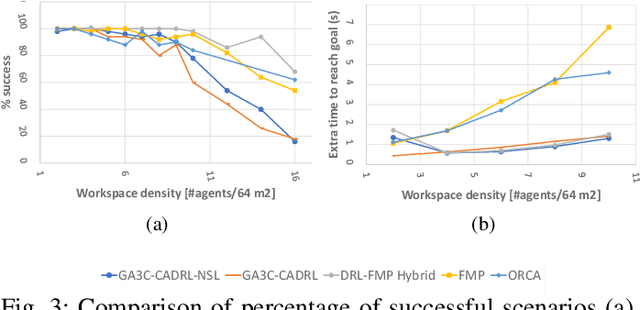
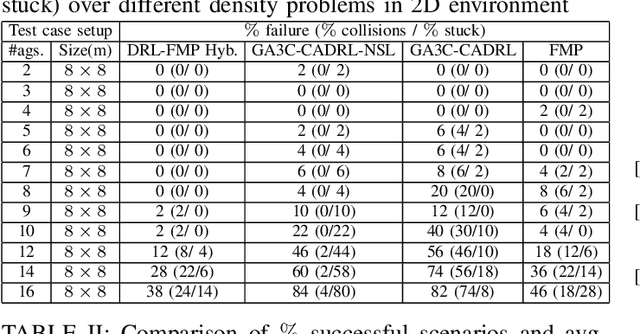
This paper introduces a hybrid algorithm of deep reinforcement learning (RL) and Force-based motion planning (FMP) to solve distributed motion planning problem in dense and dynamic environments. Individually, RL and FMP algorithms each have their own limitations. FMP is not able to produce time-optimal paths and existing RL solutions are not able to produce collision-free paths in dense environments. Therefore, we first tried improving the performance of recent RL approaches by introducing a new reward function that not only eliminates the requirement of a pre supervised learning (SL) step but also decreases the chance of collision in crowded environments. That improved things, but there were still a lot of failure cases. So, we developed a hybrid approach to leverage the simpler FMP approach in stuck, simple and high-risk cases, and continue using RL for normal cases in which FMP can't produce optimal path. Also, we extend GA3C-CADRL algorithm to 3D environment. Simulation results show that the proposed algorithm outperforms both deep RL and FMP algorithms and produces up to 50% more successful scenarios than deep RL and up to 75% less extra time to reach goal than FMP.
Force-based Algorithm for Motion Planning of Large Agent Teams
Sep 10, 2019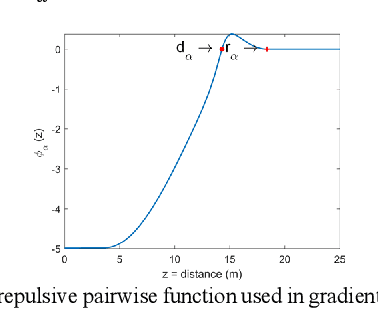
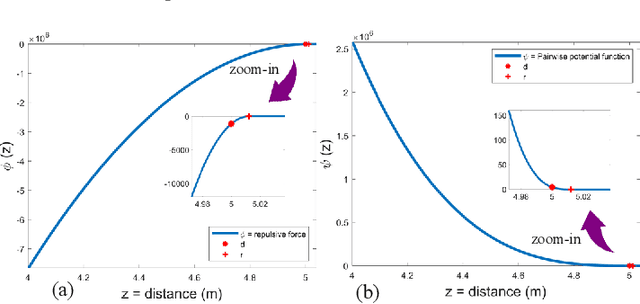
This paper presents a distributed, efficient, scalable and real-time motion planning algorithm for a large group of agents moving in 2 or 3-dimensional spaces. This algorithm enables autonomous agents to generate individual trajectories independently with only the relative position information of neighboring agents. Each agent applies a force-based control that contains two main terms: collision avoidance and navigational feedback. The first term keeps two agents separate with a certain distance, while the second term attracts each agent toward its goal location. Compared with existing collision-avoidance algorithms, the proposed force-based motion planning (FMP) algorithm is able to find collision-free motions with lower transition time, free from velocity state information of neighbouring agents. It leads to less computational overhead. The performance of proposed FMP is examined over several dense and complex 2D and 3D benchmark simulation scenarios, with results outperforming existing methods.