 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Induced Outcome Potential: Turn-Level Credit Assignment for Agents without Verifiers
May 06, 2026Long-horizon LLM agents depend on intermediate information-gathering turns, yet training feedback is usually observed only at the final answer, because process-level rewards require high-quality human annotation. Existing turn-level shaping methods reward turns that increase the likelihood of a gold answer, but they require answer supervision or stable task-specific verifiers. Conversely, label-free RL methods extract self-signals from output distributions, but mainly at the answer or trajectory level and therefore cannot assign credit to intermediate turns. We propose Self-Induced Outcome Potential (SIOP), which treats semantic clusters of final answers as latent future outcome states for potential-based turn-level credit assignment. For each query, SIOP samples multiple rollouts, clusters final answers into semantic outcome modes, and builds a reliability-aware target distribution over these states. It then rewards turns for increasing posterior support for reliable future states using a tractable cluster-level approximation. The objective generalizes information-potential shaping from gold-answer supervision to settings without task-specific gold verifiers while avoiding the broadcasted rollout-level advantages used by standard GRPO. We formalize the framework, characterize its supervised gold-answer limit, and show that SIOP improves average performance over verifier-free outcome-level baselines on seven search-augmented agentic reasoning benchmarks while approaching a gold-supervised outcome baseline. Code is available at https://github.com/dl-m9/SIOP.git.
Optimizing Agentic Reasoning with Retrieval via Synthetic Semantic Information Gain Reward
Jan 31, 2026Agentic reasoning enables large reasoning models (LRMs) to dynamically acquire external knowledge, but yet optimizing the retrieval process remains challenging due to the lack of dense, principled reward signals. In this paper, we introduce InfoReasoner, a unified framework that incentivizes effective information seeking via a synthetic semantic information gain reward. Theoretically, we redefine information gain as uncertainty reduction over the model's belief states, establishing guarantees, including non-negativity, telescoping additivity, and channel monotonicity. Practically, to enable scalable optimization without manual retrieval annotations, we propose an output-aware intrinsic estimator that computes information gain directly from the model's output distributions using semantic clustering via bidirectional textual entailment. This intrinsic reward guides the policy to maximize epistemic progress, enabling efficient training via Group Relative Policy Optimxization (GRPO). Experiments across seven question-answering benchmarks demonstrate that InfoReasoner consistently outperforms strong retrieval-augmented baselines, achieving up to 5.4% average accuracy improvement. Our work provides a theoretically grounded and scalable path toward agentic reasoning with retrieval.
DSP-Reg: Domain-Sensitive Parameter Regularization for Robust Domain Generalization
Jan 27, 2026Domain Generalization (DG) is a critical area that focuses on developing models capable of performing well on data from unseen distributions, which is essential for real-world applications. Existing approaches primarily concentrate on learning domain-invariant features, which assume that a model robust to variations in the source domains will generalize well to unseen target domains. However, these approaches neglect a deeper analysis at the parameter level, which makes the model hard to explicitly differentiate between parameters sensitive to domain shifts and those robust, potentially hindering its overall ability to generalize. In order to address these limitations, we first build a covariance-based parameter sensitivity analysis framework to quantify the sensitivity of each parameter in a model to domain shifts. By computing the covariance of parameter gradients across multiple source domains, we can identify parameters that are more susceptible to domain variations, which serves as our theoretical foundation. Based on this, we propose Domain-Sensitive Parameter Regularization (DSP-Reg), a principled framework that guides model optimization by a soft regularization technique that encourages the model to rely more on domain-invariant parameters while suppressing those that are domain-specific. This approach provides a more granular control over the model's learning process, leading to improved robustness and generalization to unseen domains. Extensive experiments on benchmarks, such as PACS, VLCS, OfficeHome, and DomainNet, demonstrate that DSP-Reg outperforms state-of-the-art approaches, achieving an average accuracy of 66.7\% and surpassing all baselines.
Distribution-Aligned Decoding for Efficient LLM Task Adaptation
Sep 19, 2025Adapting billion-parameter language models to a downstream task is still costly, even with parameter-efficient fine-tuning (PEFT). We re-cast task adaptation as output-distribution alignment: the objective is to steer the output distribution toward the task distribution directly during decoding rather than indirectly through weight updates. Building on this view, we introduce Steering Vector Decoding (SVD), a lightweight, PEFT-compatible, and theoretically grounded method. We start with a short warm-start fine-tune and extract a task-aware steering vector from the Kullback-Leibler (KL) divergence gradient between the output distribution of the warm-started and pre-trained models. This steering vector is then used to guide the decoding process to steer the model's output distribution towards the task distribution. We theoretically prove that SVD is first-order equivalent to the gradient step of full fine-tuning and derive a globally optimal solution for the strength of the steering vector. Across three tasks and nine benchmarks, SVD paired with four standard PEFT methods improves multiple-choice accuracy by up to 5 points and open-ended truthfulness by 2 points, with similar gains (1-2 points) on commonsense datasets without adding trainable parameters beyond the PEFT adapter. SVD thus offers a lightweight, theoretically grounded path to stronger task adaptation for large language models.
Stereo Superpixel Segmentation Via Decoupled Dynamic Spatial-Embedding Fusion Network
Aug 17, 2022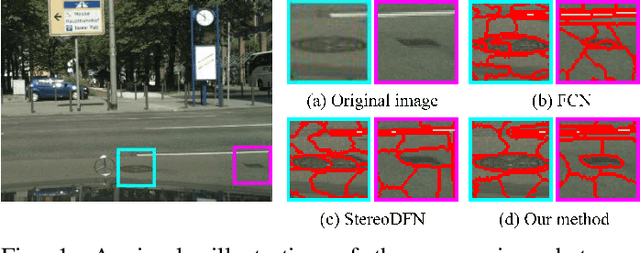
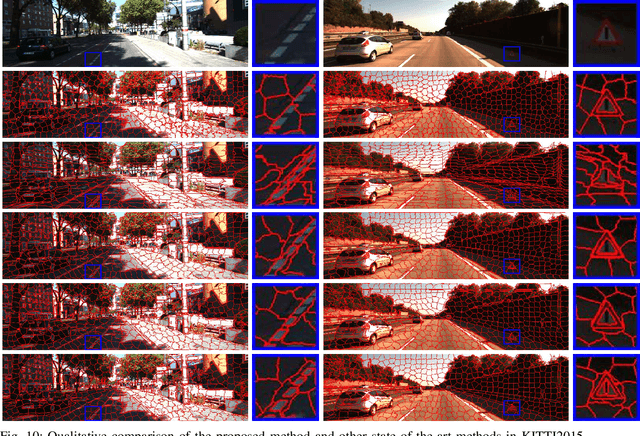
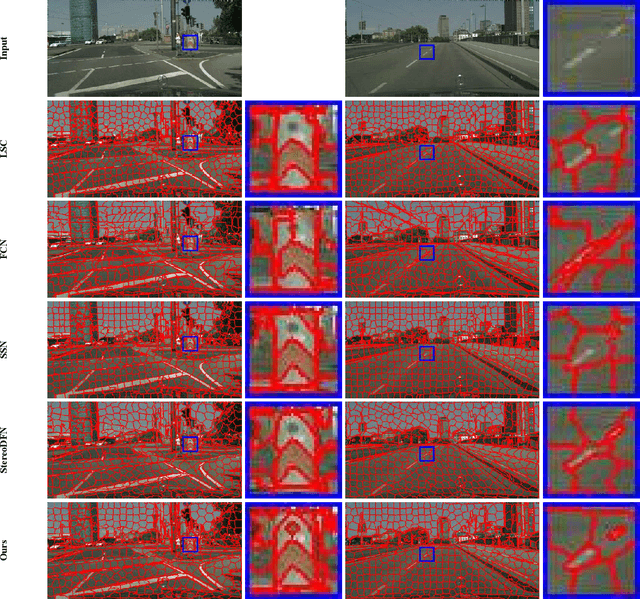
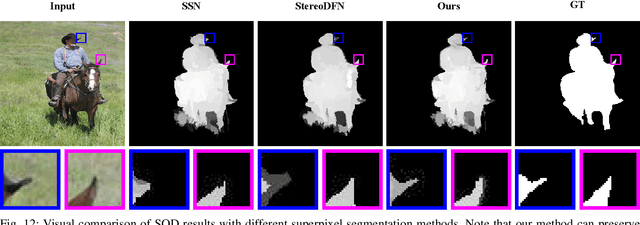
Stereo superpixel segmentation aims at grouping the discretizing pixels into perceptual regions through left and right views more collaboratively and efficiently. Existing superpixel segmentation algorithms mostly utilize color and spatial features as input, which may impose strong constraints on spatial information while utilizing the disparity information in terms of stereo image pairs. To alleviate this issue, we propose a stereo superpixel segmentation method with a decoupling mechanism of spatial information in this work. To decouple stereo disparity information and spatial information, the spatial information is temporarily removed before fusing the features of stereo image pairs, and a decoupled stereo fusion module (DSFM) is proposed to handle the stereo features alignment as well as occlusion problems. Moreover, since the spatial information is vital to superpixel segmentation, we further design a dynamic spatiality embedding module (DSEM) to re-add spatial information, and the weights of spatial information will be adaptively adjusted through the dynamic fusion (DF) mechanism in DSEM for achieving a finer segmentation. Comprehensive experimental results demonstrate that our method can achieve the state-of-the-art performance on the KITTI2015 and Cityscapes datasets, and also verify the efficiency when applied in salient object detection on NJU2K dataset. The source code will be available publicly after paper is accepted.