 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hough transform approach to safety-aware scalar field mapping using Gaussian Processes
Apr 22, 2026This paper presents a framework for mapping unknown scalar fields using a sensor-equipped autonomous robot operating in unsafe environments. The unsafe regions are defined as regions of high-intensity, where the field value exceeds a predefined safety threshold. For safe and efficient mapping of the scalar field, the sensor-equipped robot must avoid high-intensity regions during the measurement process. In this paper, the scalar field is modeled as a sample from a Gaussian process (GP), which enables Bayesian inference and provides closed-form expressions for both the predictive mean and the uncertainty. Concurrently, the spatial structure of the high-intensity regions is estimated in real-time using the Hough transform (HT), leveraging the evolving GP posterior. A safe sampling strategy is then employed to guide the robot towards safe measurement locations, using probabilistic safety guarantees on the evolving GP posterior. The estimated high-intensity regions also facilitate the design of safe motion plans for the robot. The effectiveness of the approach is verified through two numerical simulation studies and an indoor experiment for mapping a light-intensity field using a wheeled mobile robot.
Stability and Sensitivity Analysis of Relative Temporal-Difference Learning: Extended Version
Mar 29, 2026Relative temporal-difference (TD) learning was introduced to mitigate the slow convergence of TD methods when the discount factor approaches one by subtracting a baseline from the temporal-difference update. While this idea has been studied in the tabular setting, stability guarantees with function approximation remain poorly understood. This paper analyzes relative TD learning with linear function approximation. We establish stability conditions for the algorithm and show that the choice of baseline distribution plays a central role. In particular, when the baseline is chosen as the empirical distribution of the state-action process, the algorithm is stable for any non-negative baseline weight and any discount factor. We also provide a sensitivity analysis of the resulting parameter estimates, characterizing both asymptotic bias and covariance. The asymptotic covariance and asymptotic bias are shown to remain uniformly bounded as the discount factor approaches one.
Parallel OctoMapping: A Scalable Framework for Enhanced Path Planning in Autonomous Navigation
Mar 23, 2026Mapping is essential in robotics and autonomous systems because it provides the spatial foundation for path planning. Efficient mapping enables planning algorithms to generate reliable paths while ensuring safety and adapting in real time to complex environments. Fixed-resolution mapping methods often produce overly conservative obstacle representations that lead to suboptimal paths or planning failures in cluttered scenes. To address this issue, we introduce Parallel OctoMapping (POMP), an efficient OctoMap-based mapping technique that maximizes available free space and supports multi-threaded computation. To the best of our knowledge, POMP is the first method that, at a fixed occupancy-grid resolution, refines the representation of free space while preserving map fidelity and compatibility with existing search-based planners. It can therefore be integrated into existing planning pipelines, yielding higher pathfinding success rates and shorter path lengths, especially in cluttered environments, while substantially improving computational efficiency.
A Taylor Series Approach to Correct Localization Errors in Robotic Field Mapping using Gaussian Processes
Jan 28, 2026Gaussian Processes (GPs) are powerful non-parametric Bayesian models for regression of scalar fields, formulated under the assumption that measurement locations are perfectly known and the corresponding field measurements have Gaussian noise. However, many real-world scalar field mapping applications rely on sensor-equipped mobile robots to collect field measurements, where imperfect localization introduces state uncertainty. Such discrepancies between the estimated and true measurement locations degrade GP mean and covariance estimates. To address this challenge, we propose a method for updating the GP models when improved estimates become available. Leveraging the differentiability of the kernel function, a second-order correction algorithm is developed using the precomputed Jacobians and Hessians of the GP mean and covariance functions for real-time refinement based on measurement location discrepancy data. Simulation results demonstrate improved prediction accuracy and computational efficiency compared to full model retraining.
Improved Dwell-times for Switched Nonlinear Systems using Memory Regression Extension
Apr 25, 2025This paper presents a switched systems approach for extending the dwell-time of an autonomous agent during GPS-denied operation by leveraging memory regressor extension (MRE) techniques. To maintain accurate trajectory tracking despite unknown dynamics and environmental disturbances, the agent periodically acquires access to GPS, allowing it to correct accumulated state estimation errors. The motivation for this work arises from the limitations of existing switched system approaches, where increasing estimation errors during GPS-denied intervals and overly conservative dwell-time conditions restrict the operational efficiency of the agent. By leveraging MRE techniques during GPS-available intervals, the developed method refines the estimates of unknown system parameters, thereby enabling longer and more reliable operation in GPS-denied environments. A Lyapunov-based switched-system stability analysis establishes that improved parameter estimates obtained through concurrent learning allow extended operation in GPS-denied intervals without compromising closed-loop system stability. Simulation results validate the theoretical findings, demonstrating dwell-time extensions and enhanced trajectory tracking performance.
A Taylor Series Approach to Correction of Input Errors in Gaussian Process Regression
Apr 25, 2025Gaussian Processes (GPs) are widely recognized as powerful non-parametric models for regression and classification. Traditional GP frameworks predominantly operate under the assumption that the inputs are either accurately known or subject to zero-mean noise. However, several real-world applications such as mobile sensors have imperfect localization, leading to inputs with biased errors. These biases can typically be estimated through measurements collected over time using, for example, Kalman filters. To avoid recomputation of the entire GP model when better estimates of the inputs used in the training data become available, we introduce a technique for updating a trained GP model to incorporate updated estimates of the inputs. By leveraging the differentiability of the mean and covariance functions derived from the squared exponential kernel, a second-order correction algorithm is developed to update the trained GP models. Precomputed Jacobians and Hessians of kernels enable real-time refinement of the mean and covariance predictions. The efficacy of the developed approach is demonstrated using two simulation studies, with error analyses revealing improvements in both predictive accuracy and uncertainty quantification.
Fault Detection via Occupation Kernel Principal Component Analysis
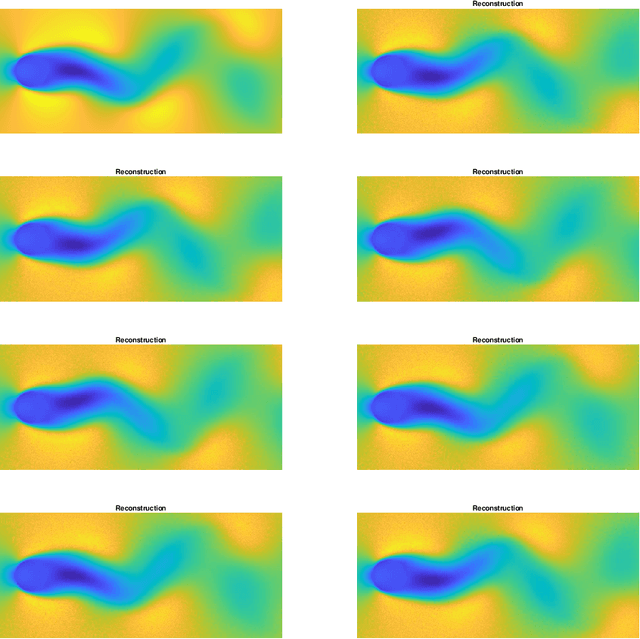
Mar 20, 2023



The reliable operation of automatic systems is heavily dependent on the ability to detect faults in the underlying dynamical system. While traditional model-based methods have been widely used for fault detection, data-driven approaches have garnered increasing attention due to their ease of deployment and minimal need for expert knowledge. In this paper, we present a novel principal component analysis (PCA) method that uses occupation kernels. Occupation kernels result in feature maps that are tailored to the measured data, have inherent noise-robustness due to the use of integration, and can utilize irregularly sampled system trajectories of variable lengths for PCA. The occupation kernel PCA method is used to develop a reconstruction error approach to fault detection and its efficacy is validated using numerical simulations.
Nonuniqueness and Convergence to Equivalent Solutions in Observer-based Inverse Reinforcement Learning
Oct 28, 2022A key challenge in solving the deterministic inverse reinforcement learning problem online and in real time is the existence of non-unique solutions. Nonuniqueness necessitates the study of the notion of equivalent solutions and convergence to such solutions. While \emph{offline} algorithms that result in convergence to equivalent solutions have been developed in the literature, online, real-time techniques that address nonuniqueness are not available. In this paper, a regularized history stack observer is developed to generate solutions that are approximately equivalent. Novel data-richness conditions are developed to facilitate the analysis and simulation results are provided to demonstrate the effectiveness of the developed technique.
Singular Dynamic Mode Decompositions
Jun 13, 2021

This manuscript is aimed at addressing several long standing limitations of dynamic mode decompositions in the application of Koopman analysis. Principle among these limitations are the convergence of associated Dynamic Mode Decomposition algorithms and the existence of Koopman modes. To address these limitations, two major modifications are made, where Koopman operators are removed from the analysis in light of Liouville operators (known as Koopman generators in special cases), and these operators are shown to be compact for certain pairs of Hilbert spaces selected separately as the domain and range of the operator. While eigenfunctions are discarded in the general analysis, a viable reconstruction algorithm is still demonstrated, and the sacrifice of eigenfunctions realizes the theoretical goals of DMD analysis that have yet to be achieved in other contexts. However, in the case where the domain is embedded in the range, an eigenfunction approach is still achievable, where a more typical DMD routine is established, but that leverages a finite rank representation that converges in norm. The manuscript concludes with the description of two Dynamic Mode Decomposition algorithms that converges when a dense collection of occupation kernels, arising from the data, are leveraged in the analysis.
Anti-Koopmanism
Jun 06, 2021
This article addresses several longstanding misconceptions concerning Koopman operators, including the existence of lattices of eigenfunctions, common eigenfunctions between Koopman operators, and boundedness and compactness of Koopman operators, among others. Counterexamples are provided for each misconception. This manuscript also proves that the Gaussian RBF's native space only supports bounded Koopman operator corresponding to affine dynamics, which shows that the assumption of boundedness is very limiting. A framework for DMD is presented that requires only densely defined Koopman operators over reproducing kernel Hilbert spaces, and the effectiveness of this approach is demonstrated through reconstruction examples.