 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't trust your eyes: on the reliability of feature visualizations
Jun 21, 2023



How do neural networks extract patterns from pixels? Feature visualizations attempt to answer this important question by visualizing highly activating patterns through optimization. Today, visualization methods form the foundation of our knowledge about the internal workings of neural networks, as a type of mechanistic interpretability. Here we ask: How reliable are feature visualizations? We start our investigation by developing network circuits that trick feature visualizations into showing arbitrary patterns that are completely disconnected from normal network behavior on natural input. We then provide evidence for a similar phenomenon occurring in standard, unmanipulated networks: feature visualizations are processed very differently from standard input, casting doubt on their ability to "explain" how neural networks process natural images. We underpin this empirical finding by theory proving that the set of functions that can be reliably understood by feature visualization is extremely small and does not include general black-box neural networks. Therefore, a promising way forward could be the development of networks that enforce certain structures in order to ensure more reliable feature visualizations.
Are Deep Neural Networks Adequate Behavioural Models of Human Visual Perception?
May 26, 2023

Deep neural networks (DNNs) are machine learning algorithms that have revolutionised computer vision due to their remarkable successes in tasks like object classification and segmentation. The success of DNNs as computer vision algorithms has led to the suggestion that DNNs may also be good models of human visual perception. We here review evidence regarding current DNNs as adequate behavioural models of human core object recognition. To this end, we argue that it is important to distinguish between statistical tools and computational models, and to understand model quality as a multidimensional concept where clarity about modelling goals is key. Reviewing a large number of psychophysical and computational explorations of core object recognition performance in humans and DNNs, we argue that DNNs are highly valuable scientific tools but that as of today DNNs should only be regarded as promising -- but not yet adequate -- computational models of human core object recognition behaviour. On the way we dispel a number of myths surrounding DNNs in vision science.
Scaling Vision Transformers to 22 Billion Parameters
Feb 10, 2023



The scaling of Transformers has driven breakthrough capabilities for language models. At present, the largest large language models (LLMs) contain upwards of 100B parameters. Vision Transformers (ViT) have introduced the same architecture to image and video modelling, but these have not yet been successfully scaled to nearly the same degree; the largest dense ViT contains 4B parameters (Chen et al., 2022). We present a recipe for highly efficient and stable training of a 22B-parameter ViT (ViT-22B) and perform a wide variety of experiments on the resulting model. When evaluated on downstream tasks (often with a lightweight linear model on frozen features), ViT-22B demonstrates increasing performance with scale. We further observe other interesting benefits of scale, including an improved tradeoff between fairness and performance, state-of-the-art alignment to human visual perception in terms of shape/texture bias, and improved robustness. ViT-22B demonstrates the potential for "LLM-like" scaling in vision, and provides key steps towards getting there.
Beyond neural scaling laws: beating power law scaling via data pruning
Jun 29, 2022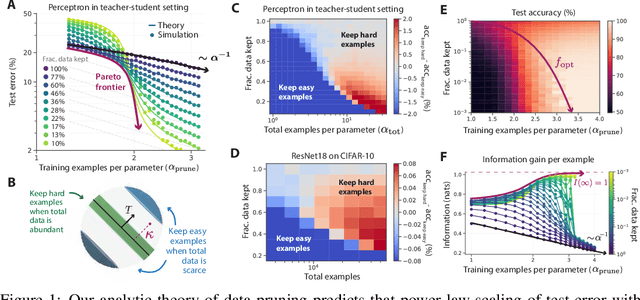

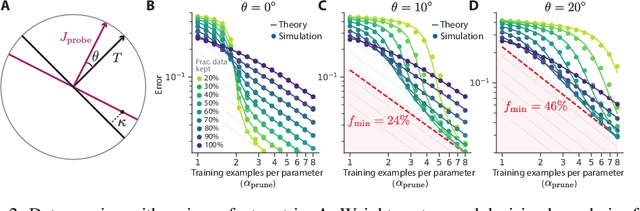
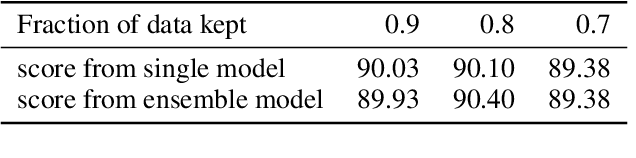
Widely observed neural scaling laws, in which error falls off as a power of the training set size, model size, or both, have driven substantial performance improvements in deep learning. However, these improvements through scaling alone require considerable costs in compute and energy. Here we focus on the scaling of error with dataset size and show how both in theory and practice we can break beyond power law scaling and reduce it to exponential scaling instead if we have access to a high-quality data pruning metric that ranks the order in which training examples should be discarded to achieve any pruned dataset size. We then test this new exponential scaling prediction with pruned dataset size empirically, and indeed observe better than power law scaling performance on ResNets trained on CIFAR-10, SVHN, and ImageNet. Given the importance of finding high-quality pruning metrics, we perform the first large-scale benchmarking study of ten different data pruning metrics on ImageNet. We find most existing high performing metrics scale poorly to ImageNet, while the best are computationally intensive and require labels for every image. We therefore developed a new simple, cheap and scalable self-supervised pruning metric that demonstrates comparable performance to the best supervised metrics. Overall, our work suggests that the discovery of good data-pruning metrics may provide a viable path forward to substantially improved neural scaling laws, thereby reducing the resource costs of modern deep learning.
The developmental trajectory of object recognition robustness: children are like small adults but unlike big deep neural networks
May 20, 2022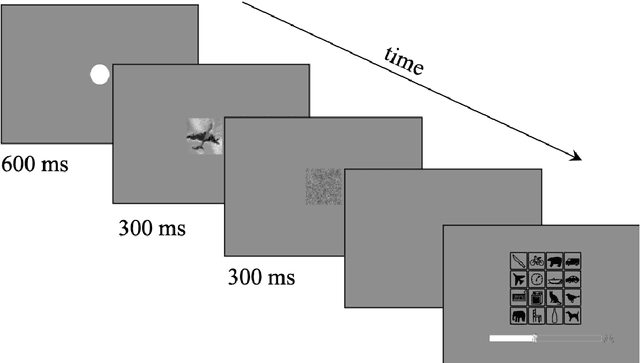
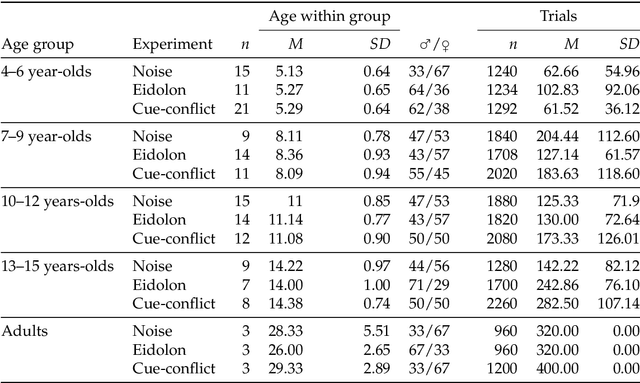
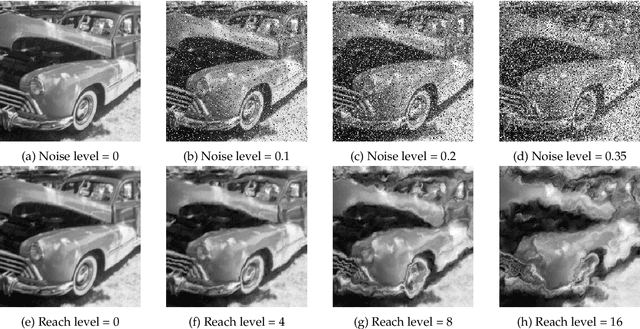

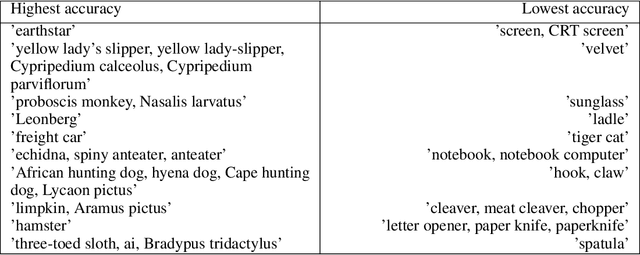
In laboratory object recognition tasks based on undistorted photographs, both adult humans and Deep Neural Networks (DNNs) perform close to ceiling. Unlike adults', whose object recognition performance is robust against a wide range of image distortions, DNNs trained on standard ImageNet (1.3M images) perform poorly on distorted images. However, the last two years have seen impressive gains in DNN distortion robustness, predominantly achieved through ever-increasing large-scale datasets$\unicode{x2014}$orders of magnitude larger than ImageNet. While this simple brute-force approach is very effective in achieving human-level robustness in DNNs, it raises the question of whether human robustness, too, is simply due to extensive experience with (distorted) visual input during childhood and beyond. Here we investigate this question by comparing the core object recognition performance of 146 children (aged 4$\unicode{x2013}$15) against adults and against DNNs. We find, first, that already 4$\unicode{x2013}$6 year-olds showed remarkable robustness to image distortions and outperform DNNs trained on ImageNet. Second, we estimated the number of $\unicode{x201C}$images$\unicode{x201D}$ children have been exposed to during their lifetime. Compared to various DNNs, children's high robustness requires relatively little data. Third, when recognizing objects children$\unicode{x2014}$like adults but unlike DNNs$\unicode{x2014}$rely heavily on shape but not on texture cues. Together our results suggest that the remarkable robustness to distortions emerges early in the developmental trajectory of human object recognition and is unlikely the result of a mere accumulation of experience with distorted visual input. Even though current DNNs match human performance regarding robustness they seem to rely on different and more data-hungry strategies to do so.
Trivial or impossible -- dichotomous data difficulty masks model differences (on ImageNet and beyond)
Oct 12, 2021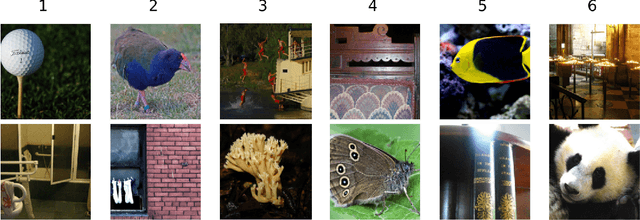
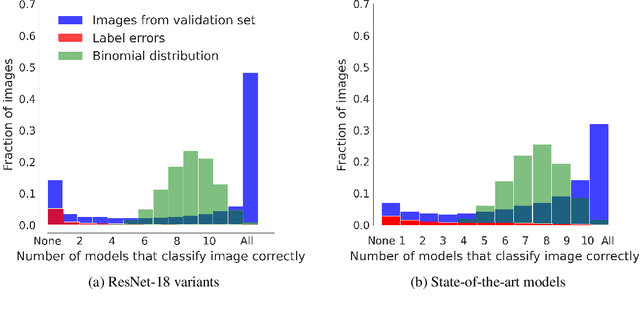
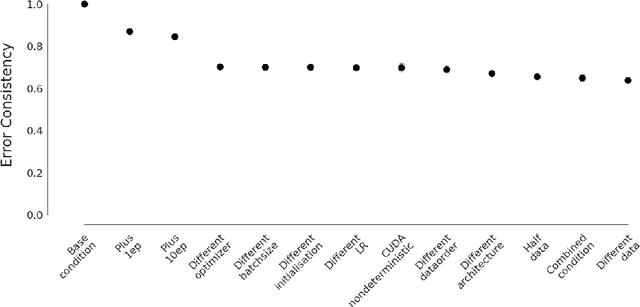
"The power of a generalization system follows directly from its biases" (Mitchell 1980). Today, CNNs are incredibly powerful generalisation systems -- but to what degree have we understood how their inductive bias influences model decisions? We here attempt to disentangle the various aspects that determine how a model decides. In particular, we ask: what makes one model decide differently from another? In a meticulously controlled setting, we find that (1.) irrespective of the network architecture or objective (e.g. self-supervised, semi-supervised, vision transformers, recurrent models) all models end up with a similar decision boundary. (2.) To understand these findings, we analysed model decisions on the ImageNet validation set from epoch to epoch and image by image. We find that the ImageNet validation set, among others, suffers from dichotomous data difficulty (DDD): For the range of investigated models and their accuracies, it is dominated by 46.0% "trivial" and 11.5% "impossible" images (beyond label errors). Only 42.5% of the images could possibly be responsible for the differences between two models' decision boundaries. (3.) Only removing the "impossible" and "trivial" images allows us to see pronounced differences between models. (4.) Humans are highly accurate at predicting which images are "trivial" and "impossible" for CNNs (81.4%). This implies that in future comparisons of brains, machines and behaviour, much may be gained from investigating the decisive role of images and the distribution of their difficulties.
How Well do Feature Visualizations Support Causal Understanding of CNN Activations?
Jun 23, 2021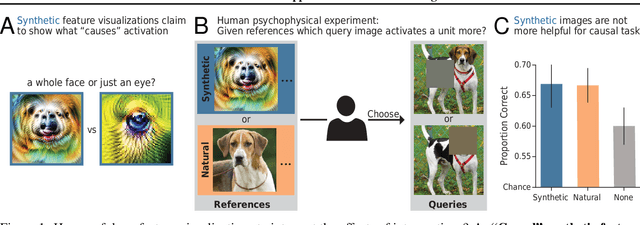
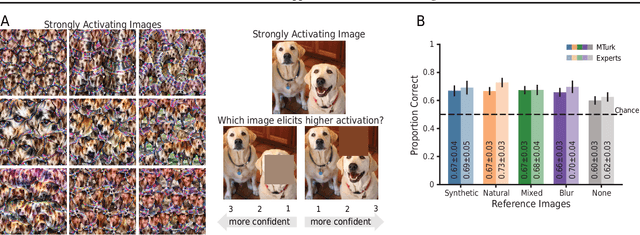
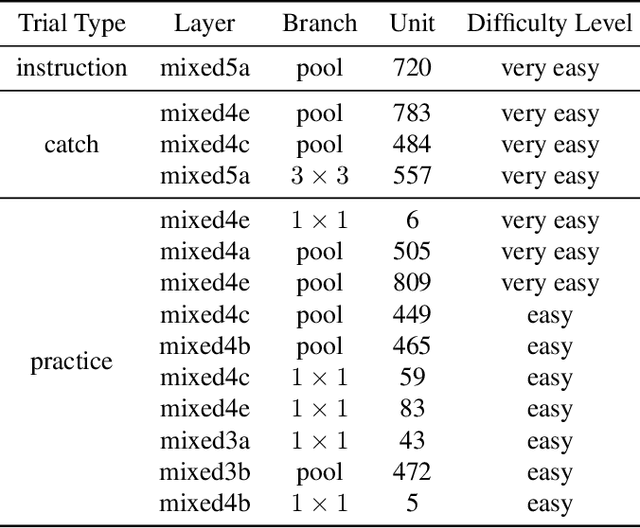
One widely used approach towards understanding the inner workings of deep convolutional neural networks is to visualize unit responses via activation maximization. Feature visualizations via activation maximization are thought to provide humans with precise information about the image features that cause a unit to be activated. If this is indeed true, these synthetic images should enable humans to predict the effect of an intervention, such as whether occluding a certain patch of the image (say, a dog's head) changes a unit's activation. Here, we test this hypothesis by asking humans to predict which of two square occlusions causes a larger change to a unit's activation. Both a large-scale crowdsourced experiment and measurements with experts show that on average, the extremely activating feature visualizations by Olah et al. (2017) indeed help humans on this task ($67 \pm 4\%$ accuracy; baseline performance without any visualizations is $60 \pm 3\%$). However, they do not provide any significant advantage over other visualizations (such as e.g. dataset samples), which yield similar performance ($66 \pm 3\%$ to $67 \pm 3\%$ accuracy). Taken together, we propose an objective psychophysical task to quantify the benefit of unit-level interpretability methods for humans, and find no evidence that feature visualizations provide humans with better "causal understanding" than simple alternative visualizations.
Partial success in closing the gap between human and machine vision
Jun 14, 2021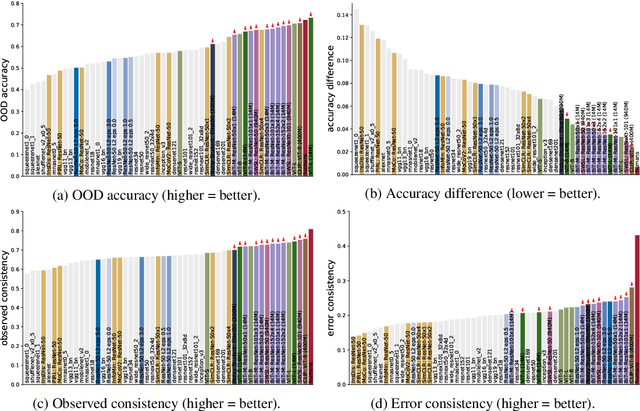

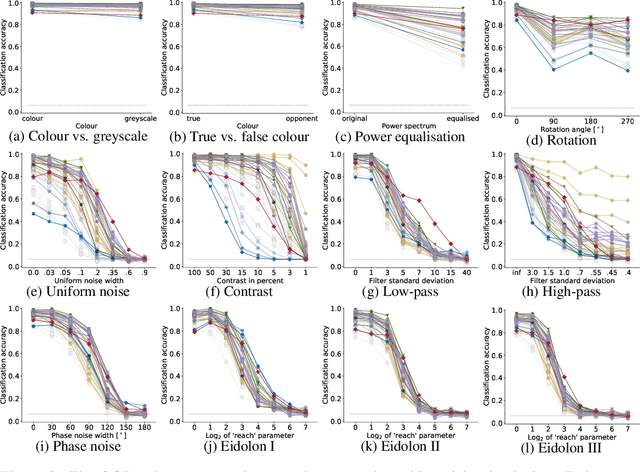
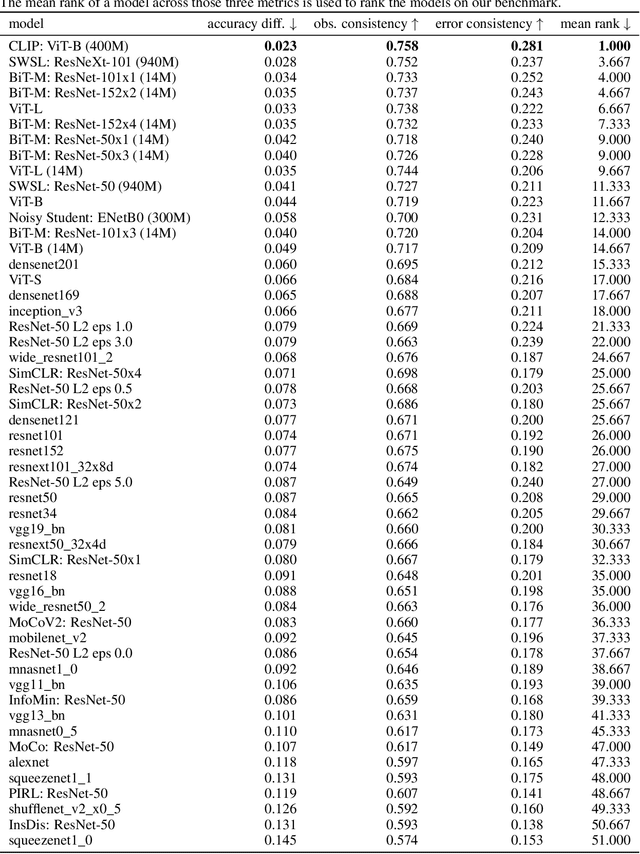
A few years ago, the first CNN surpassed human performance on ImageNet. However, it soon became clear that machines lack robustness on more challenging test cases, a major obstacle towards deploying machines "in the wild" and towards obtaining better computational models of human visual perception. Here we ask: Are we making progress in closing the gap between human and machine vision? To answer this question, we tested human observers on a broad range of out-of-distribution (OOD) datasets, adding the "missing human baseline" by recording 85,120 psychophysical trials across 90 participants. We then investigated a range of promising machine learning developments that crucially deviate from standard supervised CNNs along three axes: objective function (self-supervised, adversarially trained, CLIP language-image training), architecture (e.g. vision transformers), and dataset size (ranging from 1M to 1B). Our findings are threefold. (1.) The longstanding robustness gap between humans and CNNs is closing, with the best models now matching or exceeding human performance on most OOD datasets. (2.) There is still a substantial image-level consistency gap, meaning that humans make different errors than models. In contrast, most models systematically agree in their categorisation errors, even substantially different ones like contrastive self-supervised vs. standard supervised models. (3.) In many cases, human-to-model consistency improves when training dataset size is increased by one to three orders of magnitude. Our results give reason for cautious optimism: While there is still much room for improvement, the behavioural difference between human and machine vision is narrowing. In order to measure future progress, 17 OOD datasets with image-level human behavioural data are provided as a benchmark here: https://github.com/bethgelab/model-vs-human/
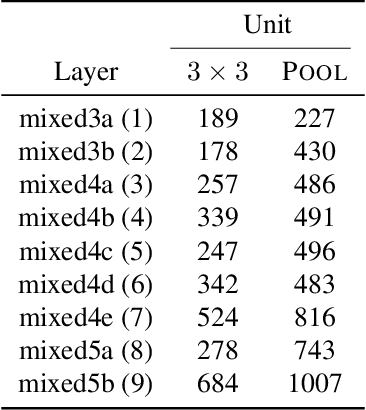
Exemplary Natural Images Explain CNN Activations Better than Feature Visualizations
Oct 23, 2020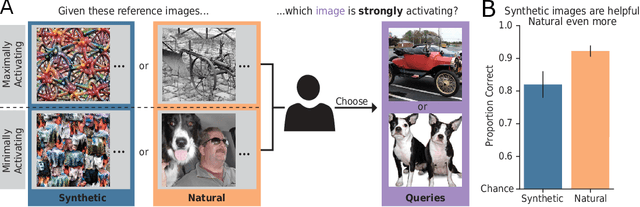
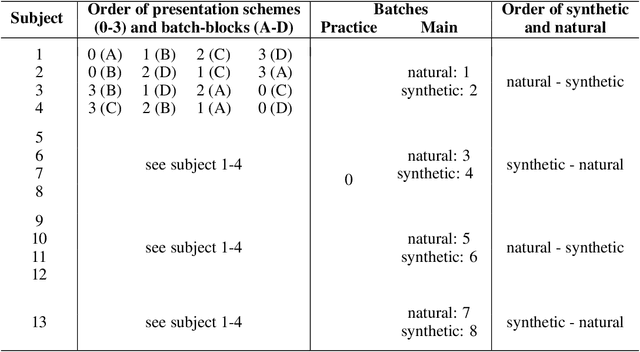
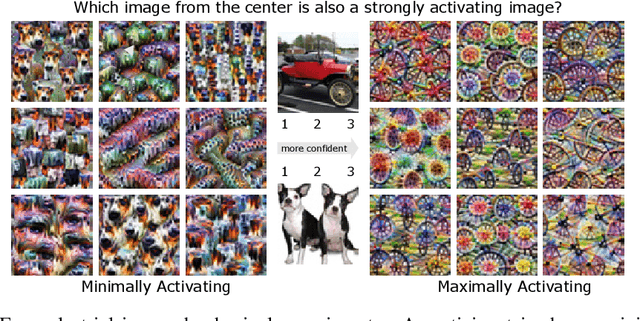
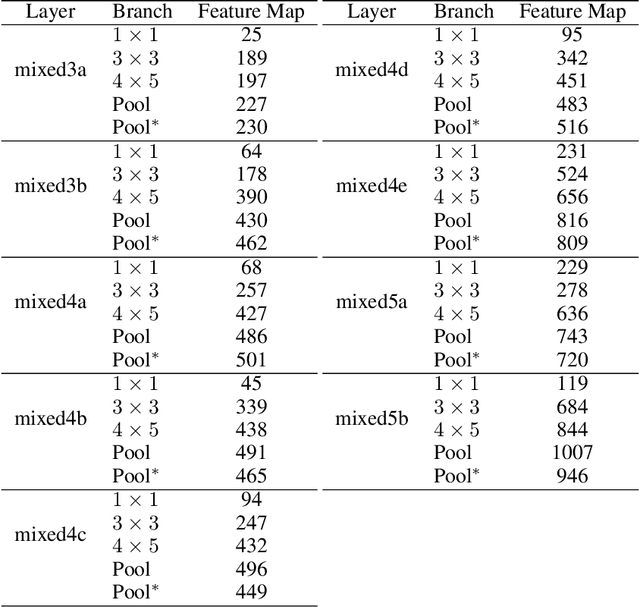
Feature visualizations such as synthetic maximally activating images are a widely used explanation method to better understand the information processing of convolutional neural networks (CNNs). At the same time, there are concerns that these visualizations might not accurately represent CNNs' inner workings. Here, we measure how much extremely activating images help humans to predict CNN activations. Using a well-controlled psychophysical paradigm, we compare the informativeness of synthetic images (Olah et al., 2017) with a simple baseline visualization, namely exemplary natural images that also strongly activate a specific feature map. Given either synthetic or natural reference images, human participants choose which of two query images leads to strong positive activation. The experiment is designed to maximize participants' performance, and is the first to probe intermediate instead of final layer representations. We find that synthetic images indeed provide helpful information about feature map activations (82% accuracy; chance would be 50%). However, natural images-originally intended to be a baseline-outperform synthetic images by a wide margin (92% accuracy). Additionally, participants are faster and more confident for natural images, whereas subjective impressions about the interpretability of feature visualization are mixed. The higher informativeness of natural images holds across most layers, for both expert and lay participants as well as for hand- and randomly-picked feature visualizations. Even if only a single reference image is given, synthetic images provide less information than natural images (65% vs. 73%). In summary, popular synthetic images from feature visualizations are significantly less informative for assessing CNN activations than natural images. We argue that future visualization methods should improve over this simple baseline.
On the surprising similarities between supervised and self-supervised models
Oct 16, 2020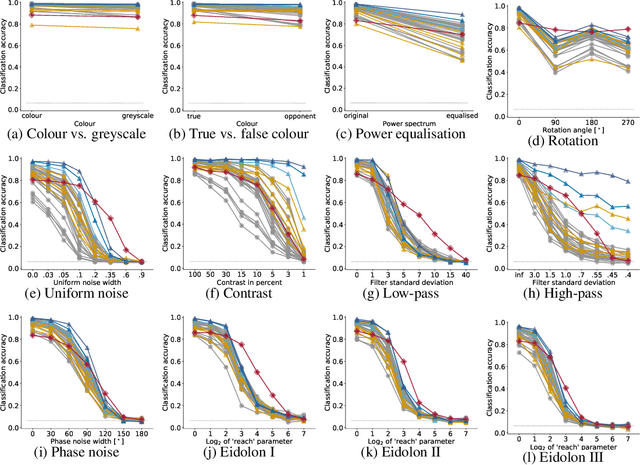
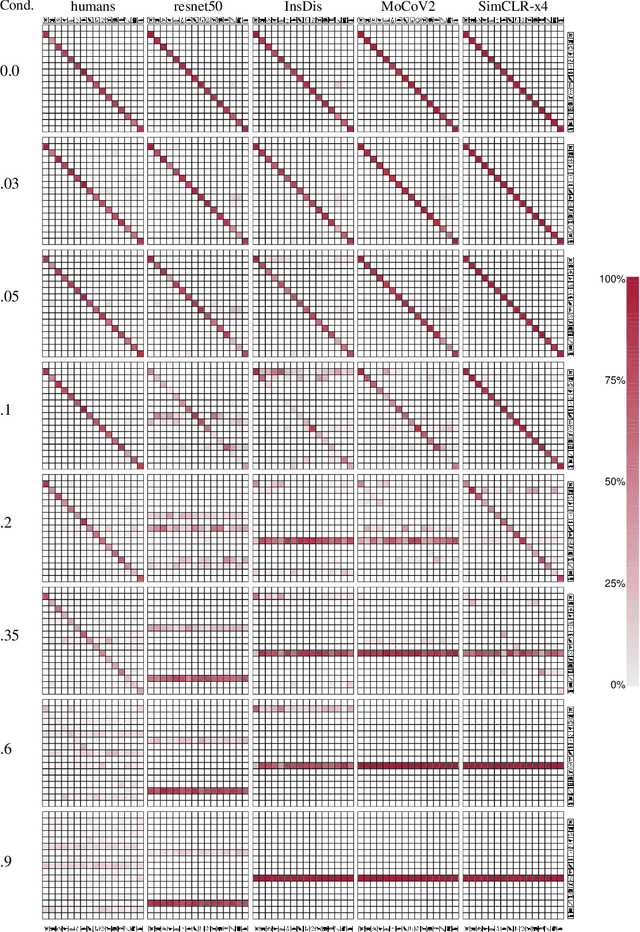
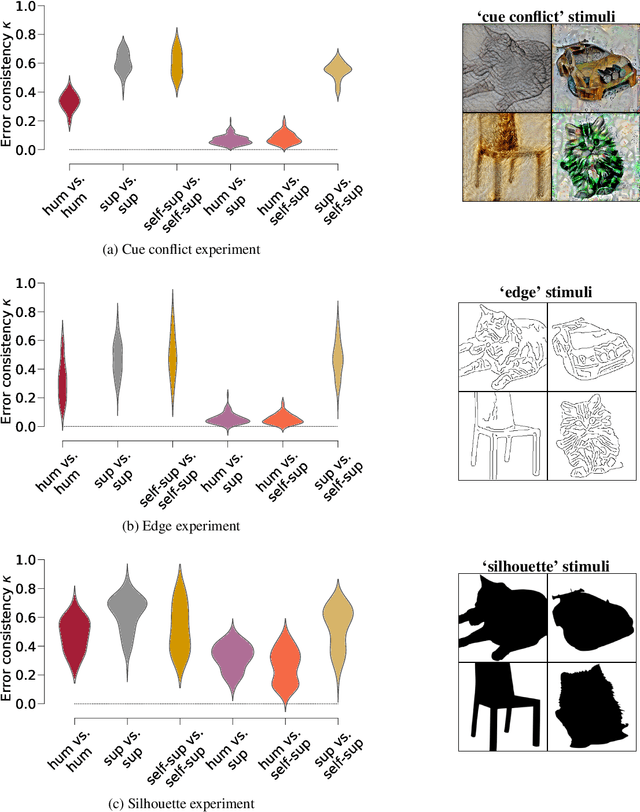
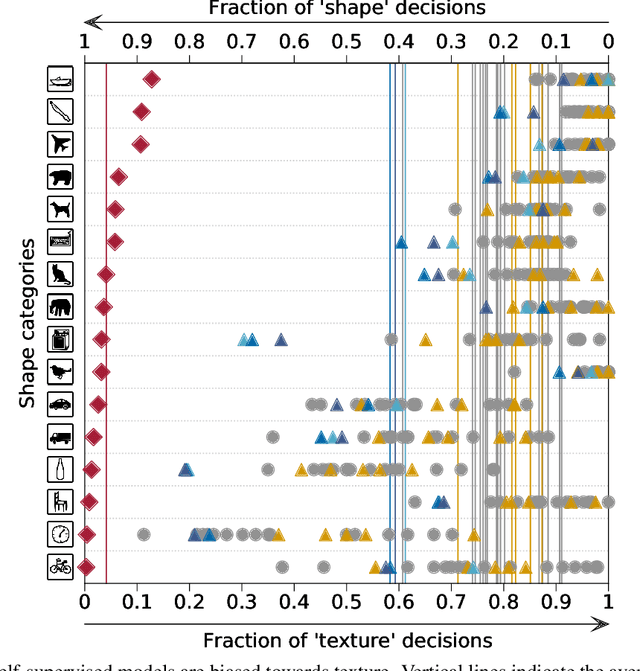
How do humans learn to acquire a powerful, flexible and robust representation of objects? While much of this process remains unknown, it is clear that humans do not require millions of object labels. Excitingly, recent algorithmic advancements in self-supervised learning now enable convolutional neural networks (CNNs) to learn useful visual object representations without supervised labels, too. In the light of this recent breakthrough, we here compare self-supervised networks to supervised models and human behaviour. We tested models on 15 generalisation datasets for which large-scale human behavioural data is available (130K highly controlled psychophysical trials). Surprisingly, current self-supervised CNNs share four key characteristics of their supervised counterparts: (1.) relatively poor noise robustness (with the notable exception of SimCLR), (2.) non-human category-level error patterns, (3.) non-human image-level error patterns (yet high similarity to supervised model errors) and (4.) a bias towards texture. Taken together, these results suggest that the strategies learned through today's supervised and self-supervised training objectives end up being surprisingly similar, but distant from human-like behaviour. That being said, we are clearly just at the beginning of what could be called a self-supervised revolution of machine vision, and we are hopeful that future self-supervised models behave differently from supervised ones, and---perhaps---more similar to robust human object recognition.