 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnbiased Active Inference for Classical Control
Jul 27, 2022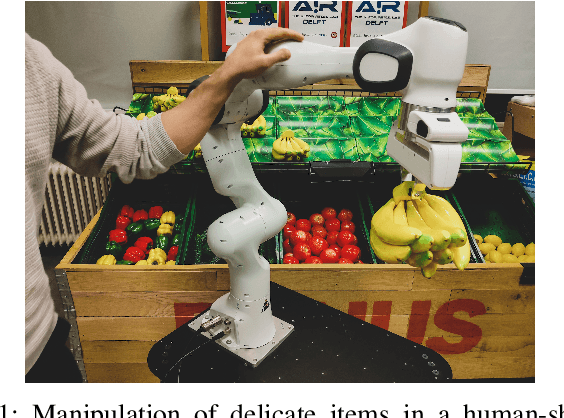
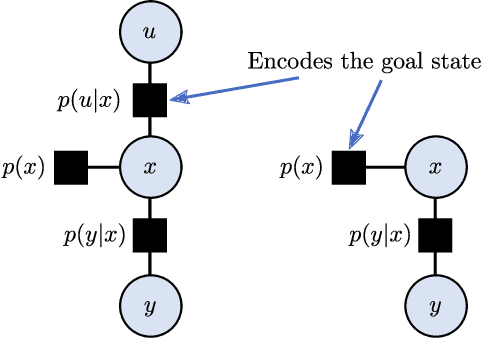
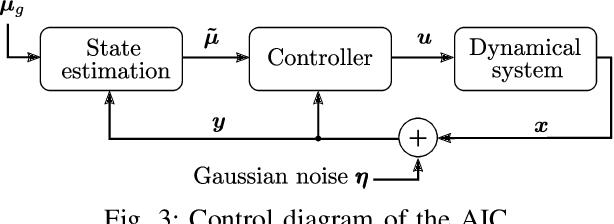
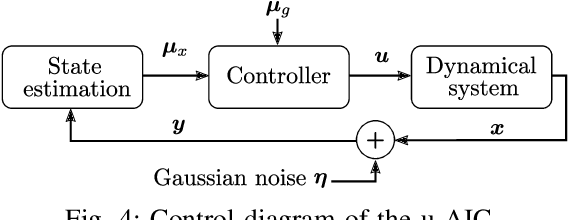
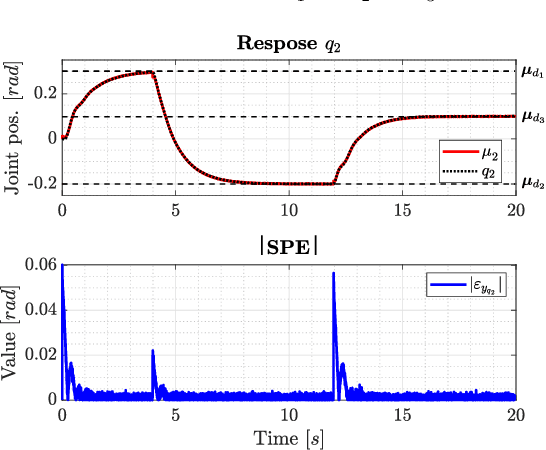
Active inference is a mathematical framework that originated in computational neuroscience. Recently, it has been demonstrated as a promising approach for constructing goal-driven behavior in robotics. Specifically, the active inference controller (AIC) has been successful on several continuous control and state-estimation tasks. Despite its relative success, some established design choices lead to a number of practical limitations for robot control. These include having a biased estimate of the state, and only an implicit model of control actions. In this paper, we highlight these limitations and propose an extended version of the unbiased active inference controller (u-AIC). The u-AIC maintains all the compelling benefits of the AIC and removes its limitations. Simulation results on a 2-DOF arm and experiments on a real 7-DOF manipulator show the improved performance of the u-AIC with respect to the standard AIC. The code can be found at https://github.com/cpezzato/unbiased_aic.
Towards Stochastic Fault-tolerant Control using Precision Learning and Active Inference
Sep 13, 2021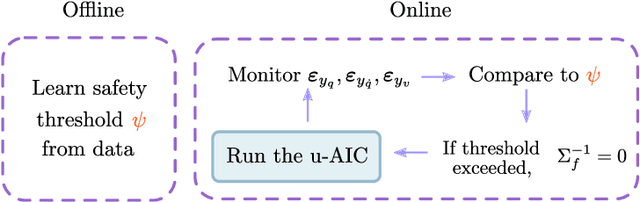
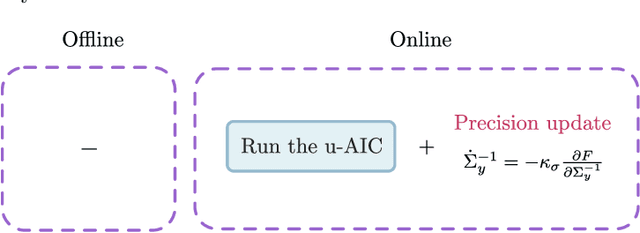
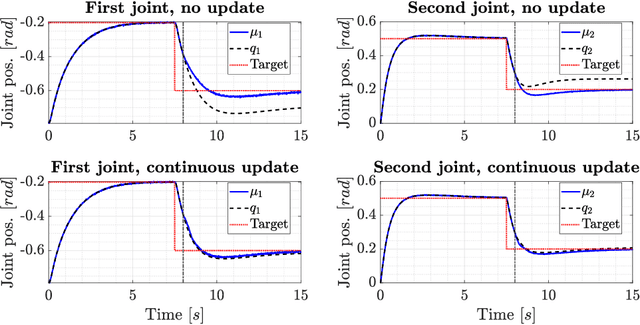
This work presents a fault-tolerant control scheme for sensory faults in robotic manipulators based on active inference. In the majority of existing schemes, a binary decision of whether a sensor is healthy (functional) or faulty is made based on measured data. The decision boundary is called a threshold and it is usually deterministic. Following a faulty decision, fault recovery is obtained by excluding the malfunctioning sensor. We propose a stochastic fault-tolerant scheme based on active inference and precision learning which does not require a priori threshold definitions to trigger fault recovery. Instead, the sensor precision, which represents its health status, is learned online in a model-free way allowing the system to gradually, and not abruptly exclude a failing unit. Experiments on a robotic manipulator show promising results and directions for future work are discussed.
Fault-tolerant Control of Robot Manipulators with Sensory Faults using Unbiased Active Inference
Apr 05, 2021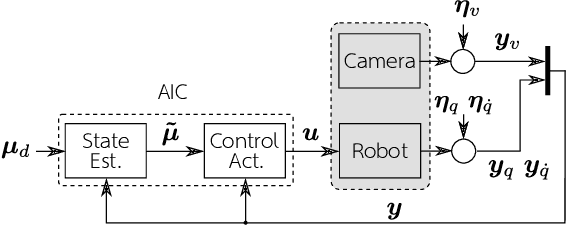
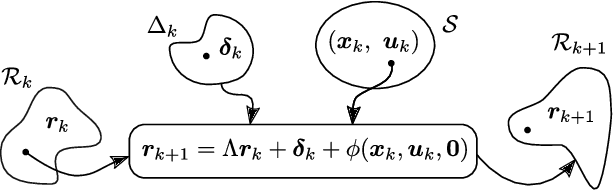
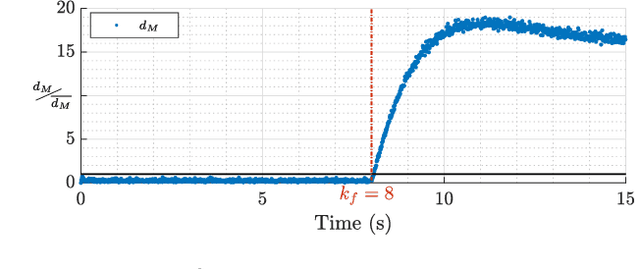
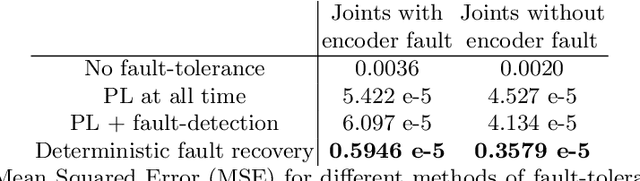
This work presents a novel fault-tolerant control scheme based on active inference. Specifically, a new formulation of active inference which, unlike previous solutions, provides unbiased state estimation and simplifies the definition of probabilistically robust thresholds for fault-tolerant control of robotic systems using the free-energy. The proposed solution makes use of the sensory prediction errors in the free-energy for the generation of residuals and thresholds for fault detection and isolation of sensory faults, and it does not require additional controllers for fault recovery. Results validating the benefits in a simulated 2-DOF manipulator are presented, and future directions to improve the current fault recovery approach are discussed.
A Novel Adaptive Controller for Robot Manipulators based on Active Inference
Sep 27, 2019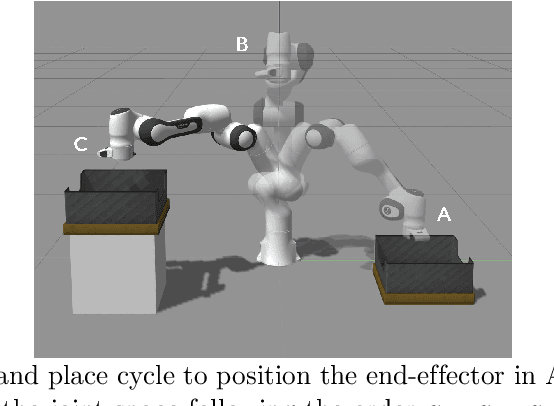
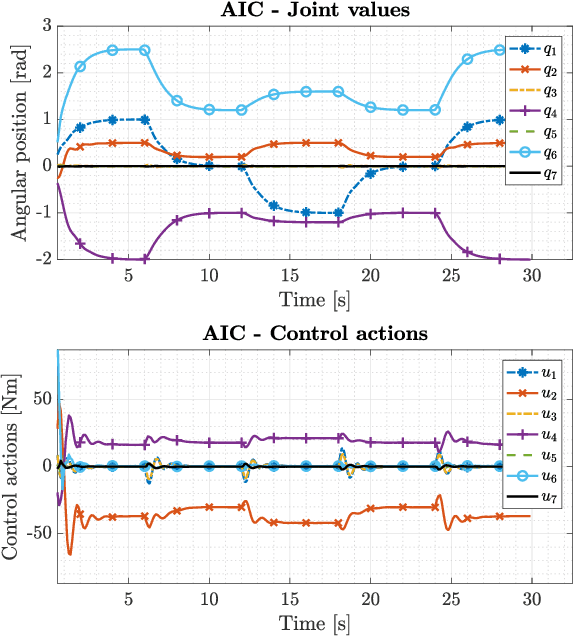
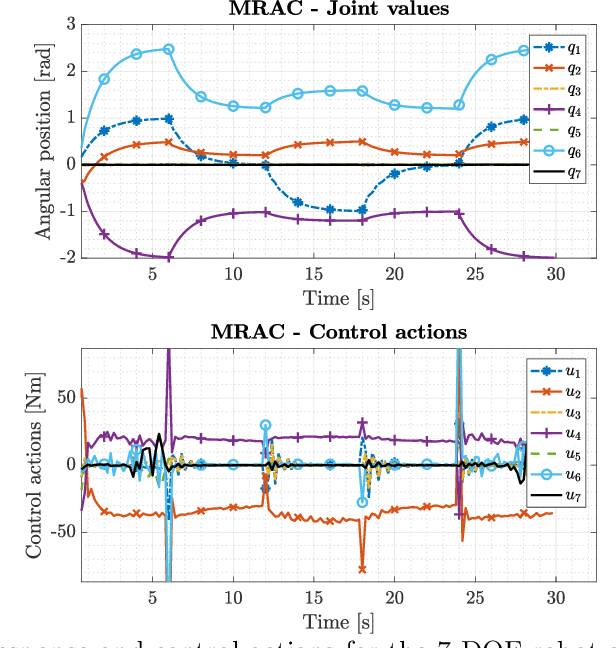
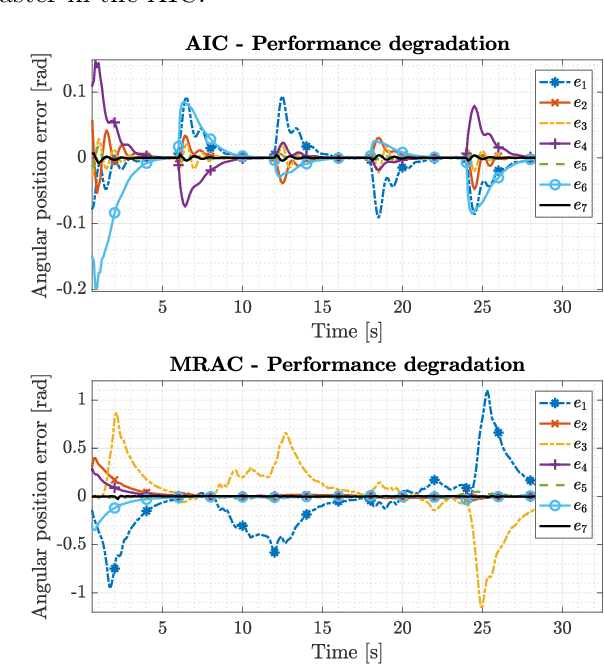
More adaptive controllers for robot manipulators are needed, which can deal with large model uncertainties. This paper presents a novel active inference controller (AIC) as an adaptive control scheme for industrial robots. This scheme is easily scalable to high degrees-of-freedom, and it maintains high performance even in the presence of large unmodeled dynamics. The proposed method is based on active inference, a promising neuroscientific theory of the brain, which describes a biologically plausible algorithm for perception and action. In this work, we formulate active inference from a control perspective, deriving a model-free control law which is less sensitive to unmodeled dynamics. The performance and the adaptive properties of the algorithm are compared to a state-of-the-art model reference adaptive controller (MRAC) in an experimental setup with a real 7-DOF robot arm. The results showed that the AIC outperformed the MRAC in terms of adaptability, providing a more general control law for robot manipulators. This confirmed the relevance of active inference for robot control.