 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Reality via Object Poses and Active Learning: Realizing Telepresence Robots with Aerial Manipulation Capabilities
Oct 18, 2022
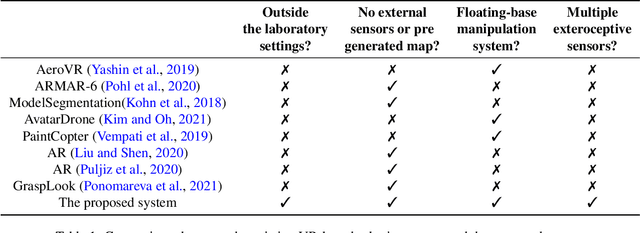
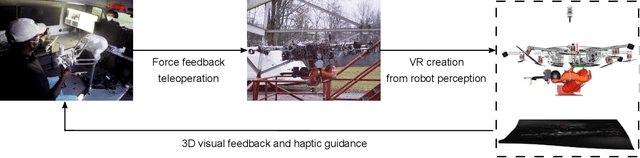
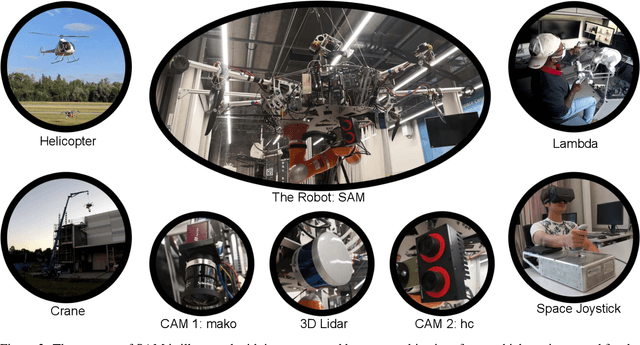
This article presents a novel telepresence system for advancing aerial manipulation in dynamic and unstructured environments. The proposed system not only features a haptic device, but also a virtual reality (VR) interface that provides real-time 3D displays of the robot's workspace as well as a haptic guidance to its remotely located operator. To realize this, multiple sensors namely a LiDAR, cameras and IMUs are utilized. For processing of the acquired sensory data, pose estimation pipelines are devised for industrial objects of both known and unknown geometries. We further propose an active learning pipeline in order to increase the sample efficiency of a pipeline component that relies on Deep Neural Networks (DNNs) based object detection. All these algorithms jointly address various challenges encountered during the execution of perception tasks in industrial scenarios. In the experiments, exhaustive ablation studies are provided to validate the proposed pipelines. Methodologically, these results commonly suggest how an awareness of the algorithms' own failures and uncertainty ("introspection") can be used tackle the encountered problems. Moreover, outdoor experiments are conducted to evaluate the effectiveness of the overall system in enhancing aerial manipulation capabilities. In particular, with flight campaigns over days and nights, from spring to winter, and with different users and locations, we demonstrate over 70 robust executions of pick-and-place, force application and peg-in-hole tasks with the DLR cable-Suspended Aerial Manipulator (SAM). As a result, we show the viability of the proposed system in future industrial applications.
Visual-Inertial Telepresence for Aerial Manipulation
Mar 25, 2020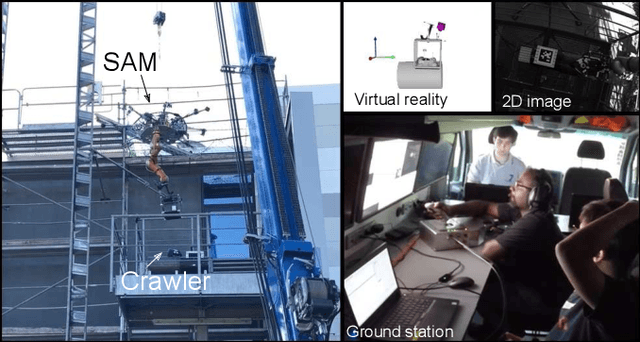
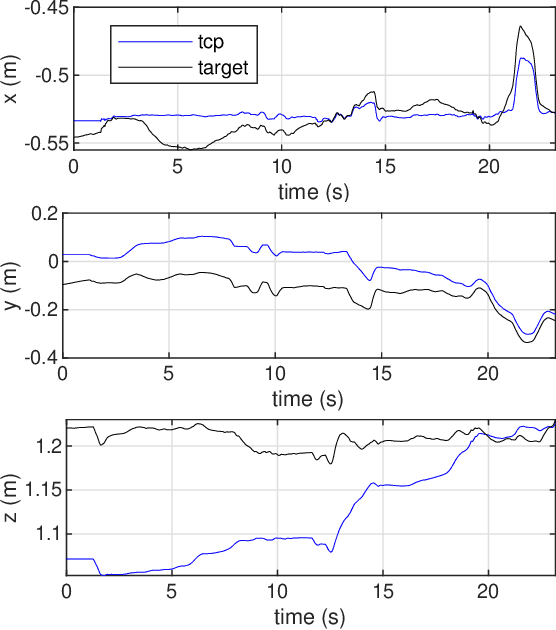
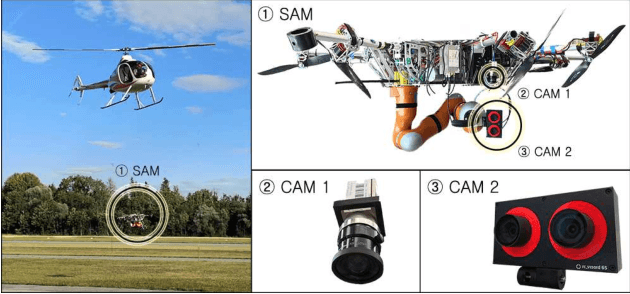
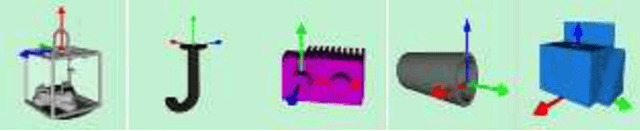
This paper presents a novel telepresence system for enhancing aerial manipulation capabilities. It involves not only a haptic device, but also a virtual reality that provides a 3D visual feedback to a remotely-located teleoperator in real-time. We achieve this by utilizing onboard visual and inertial sensors, an object tracking algorithm and a pre-generated object database. As the virtual reality has to closely match the real remote scene, we propose an extension of a marker tracking algorithm with visual-inertial odometry. Both indoor and outdoor experiments show benefits of our proposed system in achieving advanced aerial manipulation tasks, namely grasping, placing, force exertion and peg-in-hole insertion.
Smoother Position-Drift Compensation for Time Domain Passivity Approach based Teleoperation
Feb 06, 2020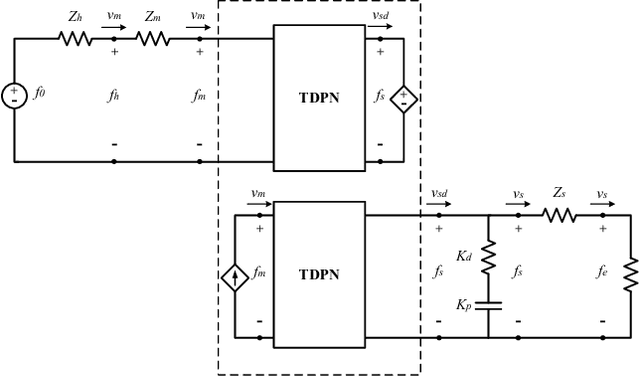
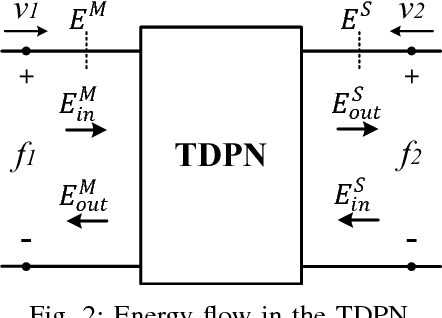
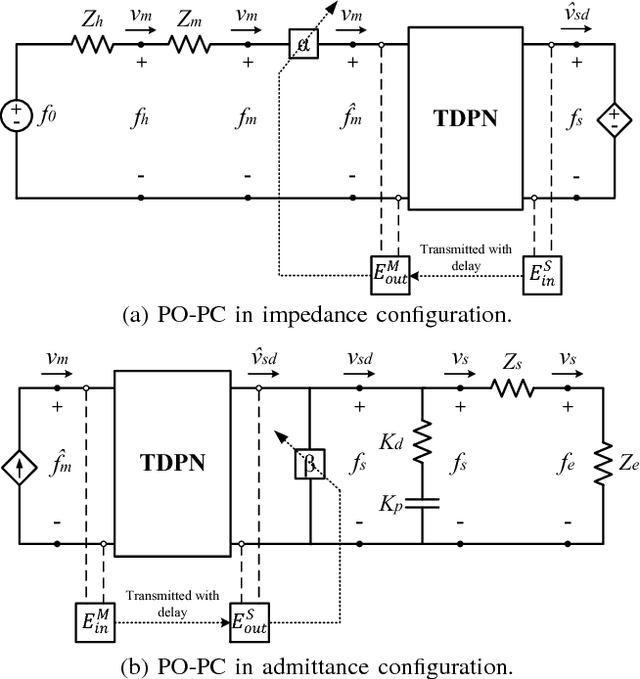
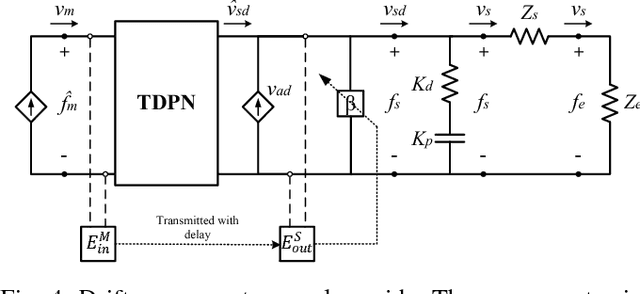
Despite being one of the most robust methods in bilateral teleoperation, Time Domain Passivity Approach (TDPA) presents the drawback of accumulating position drift between master and slave devices. The lack of position synchronization poses an obstacle to the performance of teleoperation and may prevent the successful accomplishment of such tasks. Several techniques have been developed in order to solve the position-drift problem in TDPA-based teleoperation. However, they either present poor transparency by over-conservatively constraining force feedback or add high impulse-like force signals that can be harmful to the hardware and to the human operator. We propose a new approach to compensate position drift in TDPA-based teleoperation in a smoother way, which keeps the forces within the normal range of the teleoperation task while preserving the level of transparency and the robust stability of energy-based TDPA. We also add a way of tuning the compensator to behave in accordance with the task being performed, whether it requires faster or smoother compensation. The feasibility and performance of the method were experimentally validated. Good position tracking and regular-amplitude forces are demonstrated with up to 500 ms round-trip constant and variable delays for hard-wall contacts.
Passive Compliance Control of Aerial Manipulators
Aug 09, 2018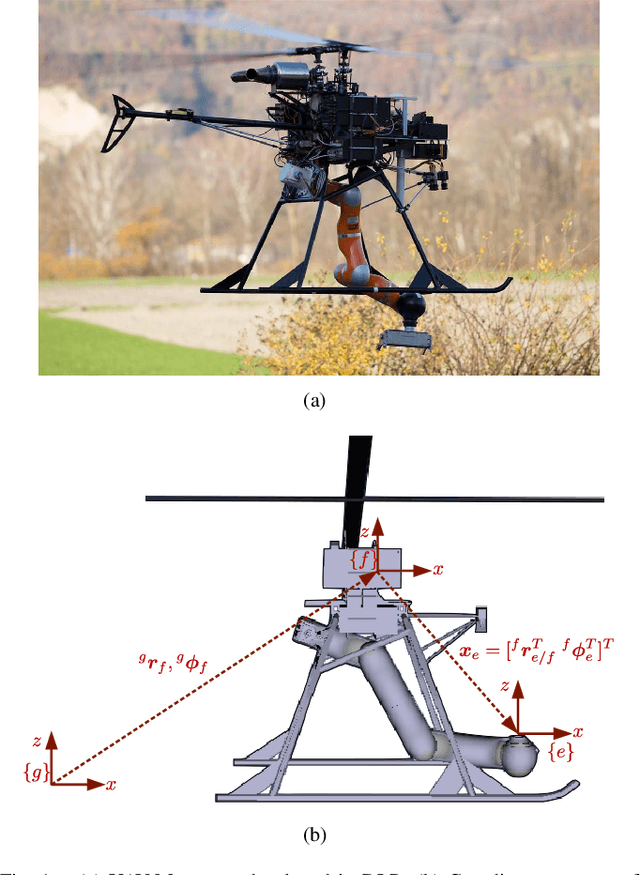
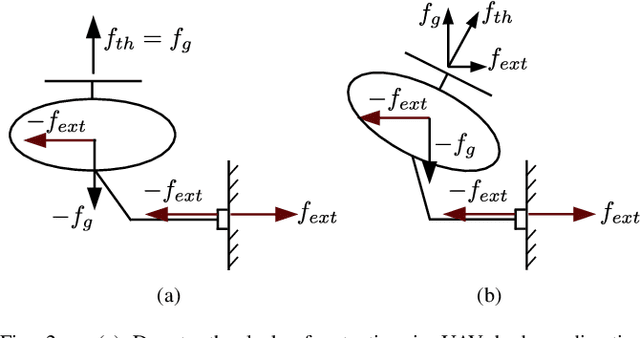
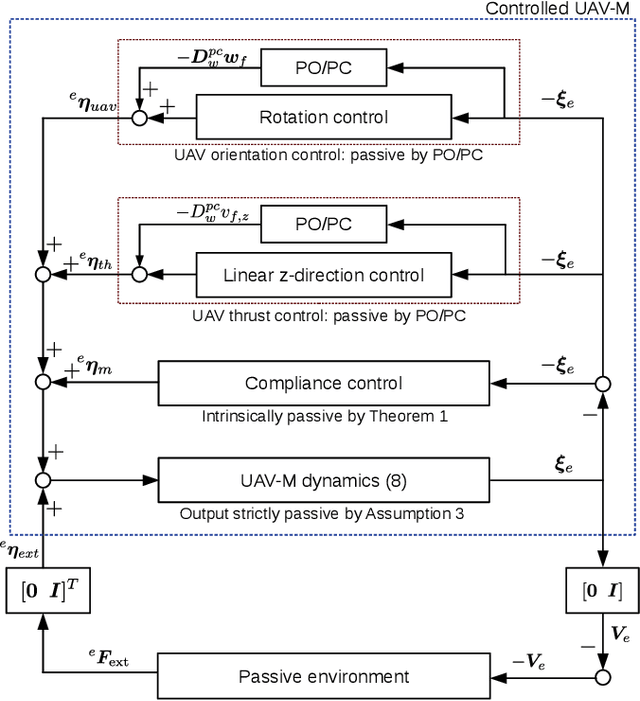

This paper presents a passive compliance control for aerial manipulators to achieve stable environmental interactions. The main challenge is the absence of actuation along body-planar directions of the aerial vehicle which might be required during the interaction to preserve passivity. The controller proposed in this paper guarantees passivity of the manipulator through a proper choice of end-effector coordinates, and that of vehicle fuselage is guaranteed by exploiting time domain passivity technique. Simulation studies validate the proposed approach.