 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAFFormer: Adaptive Feature Fusion Transformer for V2X Cooperative Perception under Channel Impairments
May 03, 2026Accurate 3D object detection is essential for ensuring the safety of autonomous vehicles. Cooperative perception, which leverages vehicle-to-everything (V2X) communication to share perceptual data, enhances detection but is vulnerable to channel impairments, such as noise, fading, and interference. To strengthen the reliability of intelligent transportation systems, this work improves the robustness of V2X cooperative perception under communication conditions that reflect common channel impairments. This paper proposes an Adaptive Feature Fusion Transformer (AFFormer), a Transformer-based framework that mitigates the adverse effects of corrupted features by modeling temporal, inter-agent, and spatial correlations. AFFormer introduces three key modules: Multi-Agent and Temporal Aggregation for context-aware fusion across agents and over time, Dual Spatial Attention for efficient modeling of spatial dependencies, and Uncertainty-Guided Fusion for entropy-driven refinement of fused features. A teacher-student knowledge distillation strategy further enhances robustness by aligning fused features with reliable early-collaboration supervision. AFFormer is validated on the V2XSet and DAIR-V2X datasets, where it consistently outperforms existing methods under both ideal and impaired communication conditions, demonstrating improved robustness to communication-induced feature degradation while maintaining a competitive efficiency-accuracy trade-off.
A comprehensive survey on point cloud registration
Mar 05, 2021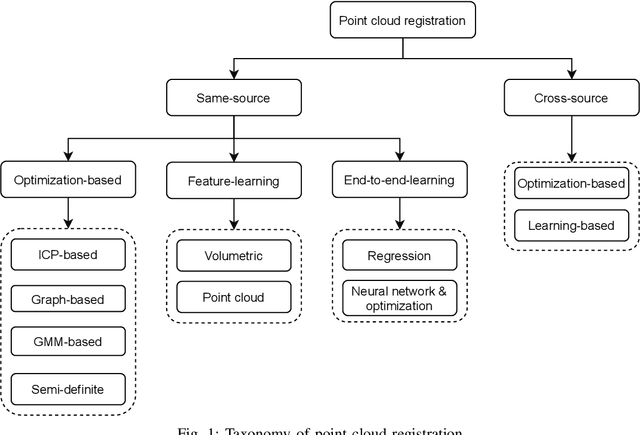
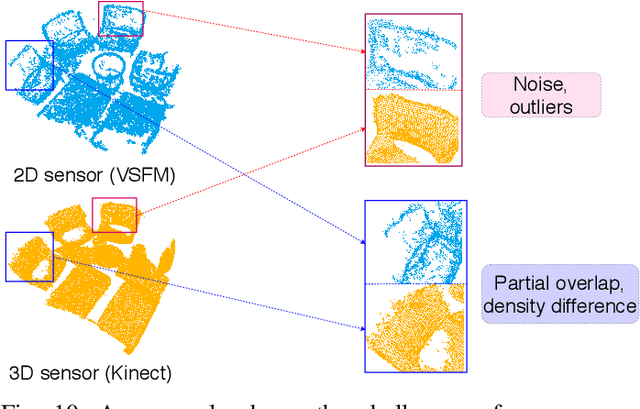
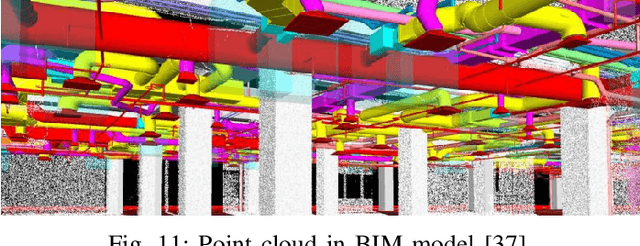
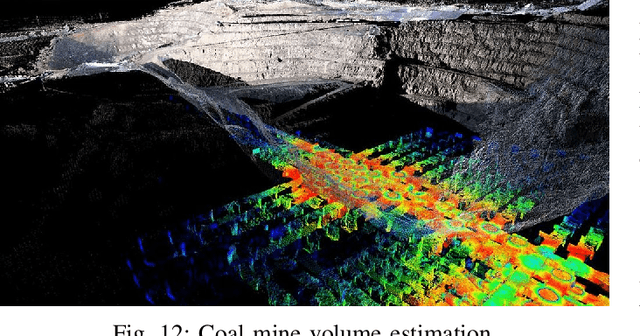
Registration is a transformation estimation problem between two point clouds, which has a unique and critical role in numerous computer vision applications. The developments of optimization-based methods and deep learning methods have improved registration robustness and efficiency. Recently, the combinations of optimization-based and deep learning methods have further improved performance. However, the connections between optimization-based and deep learning methods are still unclear. Moreover, with the recent development of 3D sensors and 3D reconstruction techniques, a new research direction emerges to align cross-source point clouds. This survey conducts a comprehensive survey, including both same-source and cross-source registration methods, and summarize the connections between optimization-based and deep learning methods, to provide further research insight. This survey also builds a new benchmark to evaluate the state-of-the-art registration algorithms in solving cross-source challenges. Besides, this survey summarizes the benchmark data sets and discusses point cloud registration applications across various domains. Finally, this survey proposes potential research directions in this rapidly growing field.