 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmulating Human Kinematic Behavior on Lower-Limb Prostheses via Multi-Contact Models and Force-Based Nonlinear Control
Sep 27, 2022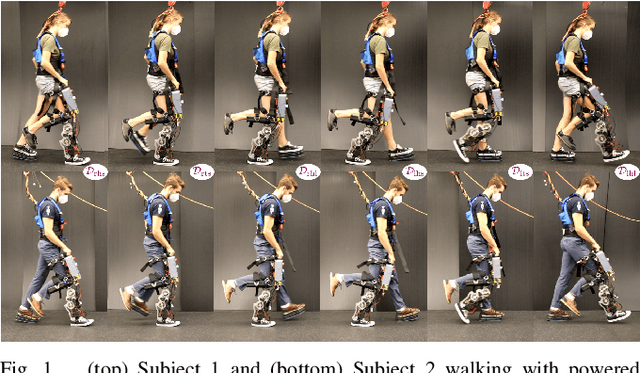
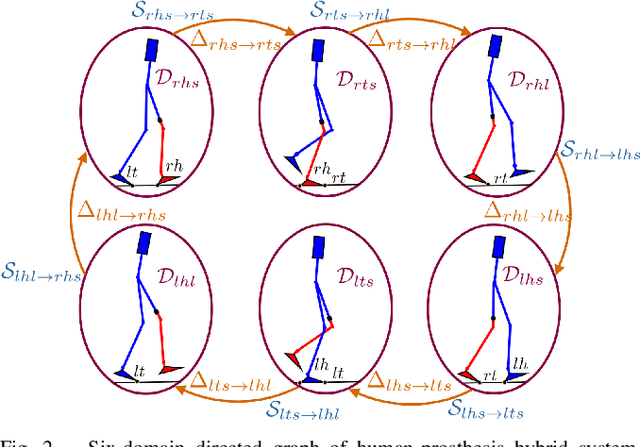
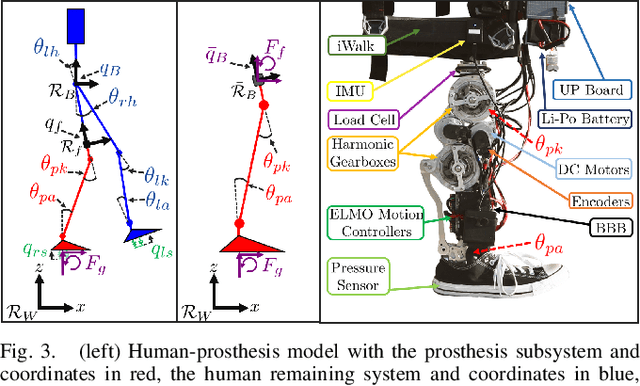
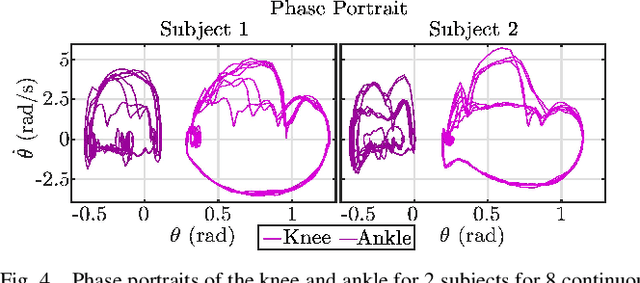
Ankle push-off largely contributes to limb energy generation in human walking, leading to smoother and more efficient locomotion. Providing this net positive work to an amputee requires an active prosthesis, but has the potential to enable more natural assisted locomotion. To this end, this paper uses multi-contact models of locomotion together with force-based nonlinear optimization-based controllers to achieve human-like kinematic behavior, including ankle push-off, on a powered transfemoral prosthesis for 2 subjects. In particular, we leverage model-based control approaches for dynamic bipedal robotic walking to develop a systematic method to realize human-like walking on a powered prosthesis that does not require subject-specific tuning. We begin by synthesizing an optimization problem that yields gaits that resemble human joint trajectories at a kinematic level, and realize these gaits on a prosthesis through a control Lyapunov function based nonlinear controller that responds to real-time ground reaction forces and interaction forces with the human. The proposed controller is implemented on a prosthesis for two subjects without tuning between subjects, emulating subject-specific human kinematic trends on the prosthesis joints. These experimental results demonstrate that our force-based nonlinear control approach achieves better tracking of human kinematic trajectories than traditional methods.
Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero Dynamics
Sep 10, 2021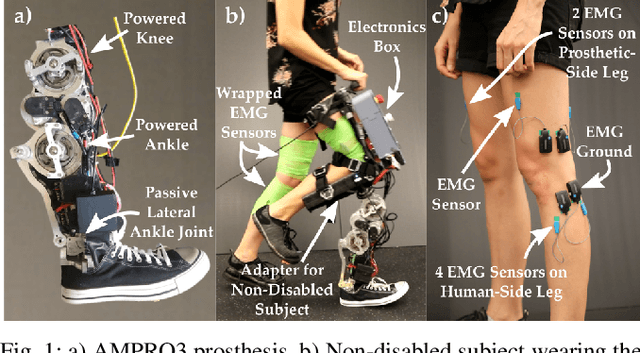
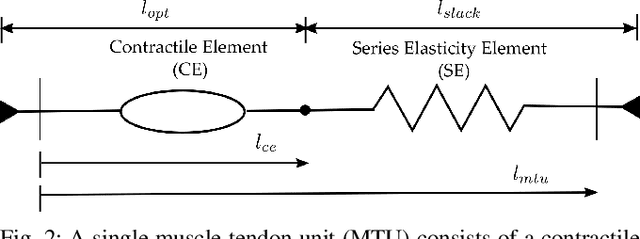
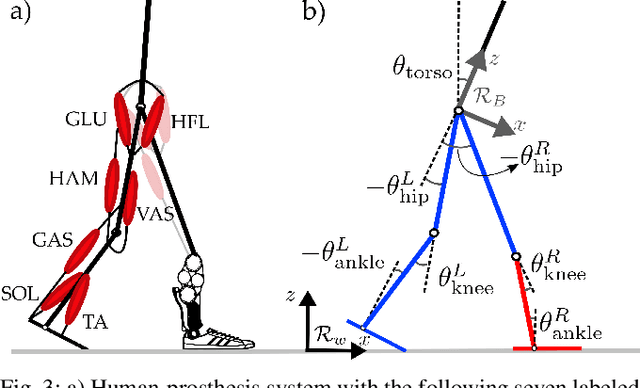
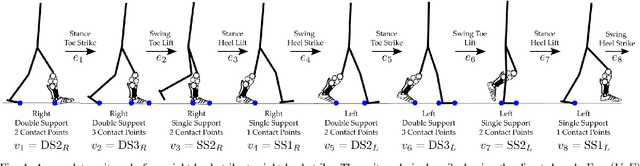
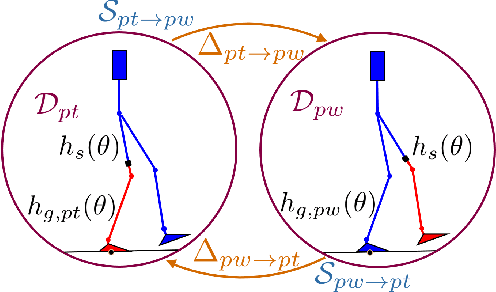
Generating provably stable walking gaits that yield natural locomotion when executed on robotic-assistive devices is a challenging task that often requires hand-tuning by domain experts. This paper presents an alternative methodology, where we propose the addition of musculoskeletal models directly into the gait generation process to intuitively shape the resulting behavior. In particular, we construct a multi-domain hybrid system model that combines the system dynamics with muscle models to represent natural multicontact walking. Stable walking gaits can then be formally generated for this model via the hybrid zero dynamics method. We experimentally apply our framework towards achieving multicontact locomotion on a dual-actuated transfemoral prosthesis, AMPRO3. The results demonstrate that enforcing feasible muscle dynamics produces gaits that yield natural locomotion (as analyzed via electromyography), without the need for extensive manual tuning. Moreover, these gaits yield similar behavior to expert-tuned gaits. We conclude that the novel approach of combining robotic walking methods (specifically HZD) with muscle models successfully generates anthropomorphic robotic-assisted locomotion.
Model-Dependent Prosthesis Control with Real-Time Force Sensing
May 24, 2021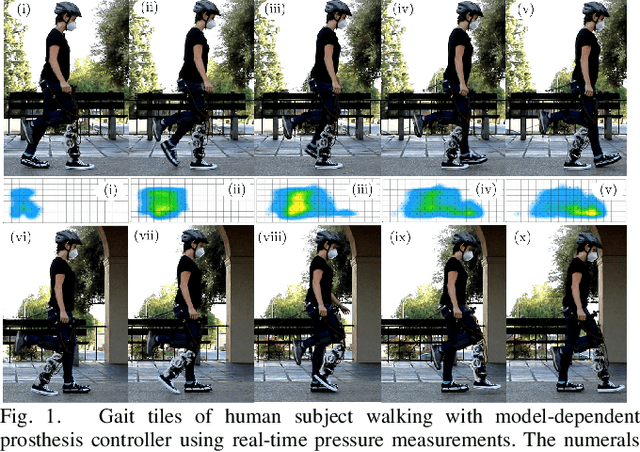
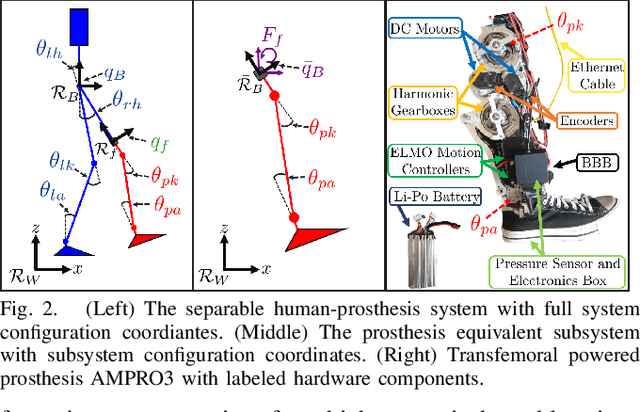
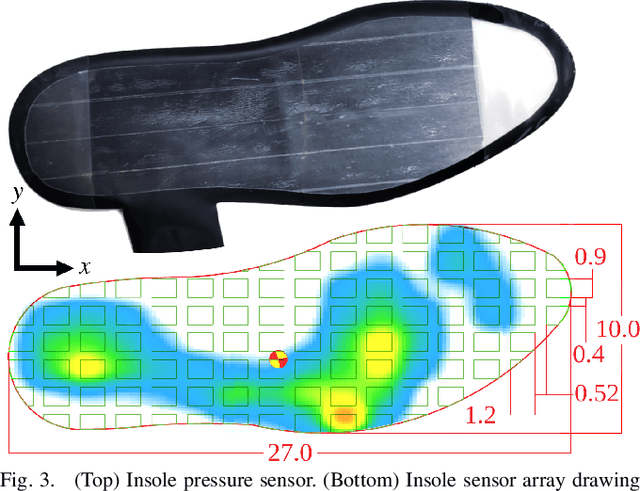
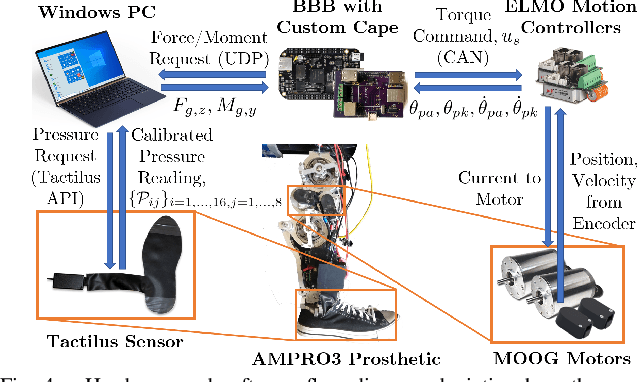
Lower-limb prosthesis wearers are more prone to fall than non-amputees. Powered prosthesis can reduce this instability of passive prostheses. While shown to be more stable in practice, powered prostheses generally use model-independent control methods that lack formal guarantees of stability and rely on heuristic tuning. Recent work overcame one of the limitations of model-based prosthesis control by developing a class of stable prosthesis subsystem controllers independent of the human model, except for its interaction forces with the prosthesis. Force sensors to measure these socket interaction forces as well as the ground reaction forces (GRFs) could introduce noise into the control loop making hardware implementation infeasible. This paper addresses part of this limitation by obtaining some of the GRFs through an insole pressure sensor. This paper achieves the first model-dependent prosthesis controller that uses in-the-loop on-board real-time force sensing, resulting in stable human-prosthesis walking and increasing the validity of our formal guarantees of stability.
Model-Dependent Prosthesis Control with Interaction Force Estimation
Nov 10, 2020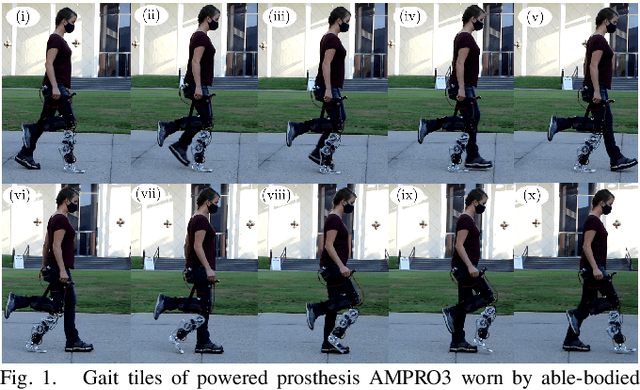
Current prosthesis control methods are primarily model-independent - lacking formal guarantees of stability, relying largely on heuristic tuning parameters for good performance, and neglecting use of the natural dynamics of the system. Model-dependence for prosthesis controllers is difficult to achieve due to the unknown human dynamics. We build upon previous work which synthesized provably stable prosthesis walking through the use of rapidly exponentially stabilizing control Lyapunov functions (RES-CLFs). This paper utilizes RES-CLFs together with force estimation to construct model-based optimization-based controllers for the prosthesis. These are experimentally realized on hardware with onboard sensing and computation. This hardware demonstration has formal guarantees of stability, utilizes the natural dynamics of the system, and achieves superior tracking to other prosthesis trajectory tracking control methods.
Data-driven Characterization of Human Interaction for Model-based Control of Powered Prostheses
Mar 17, 2020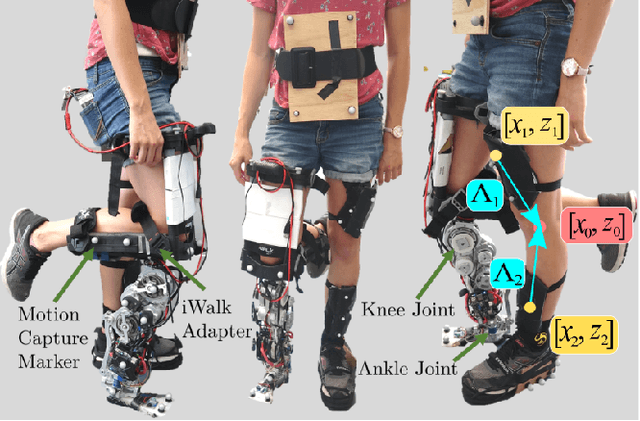
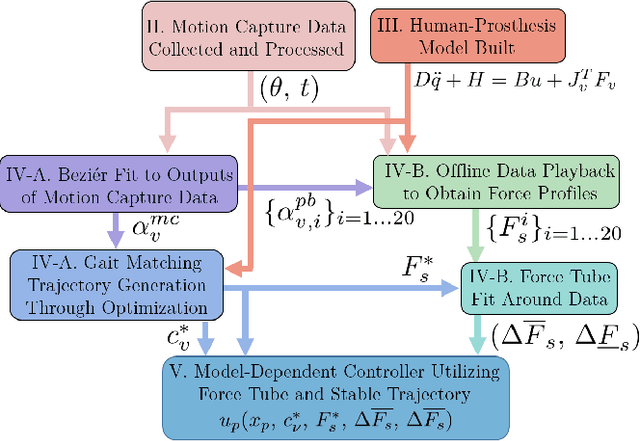
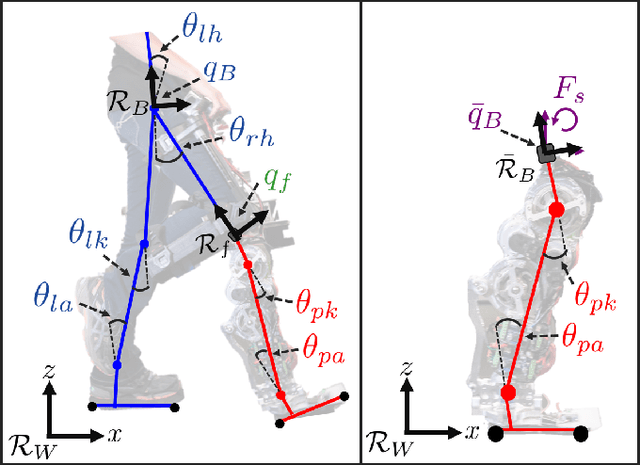
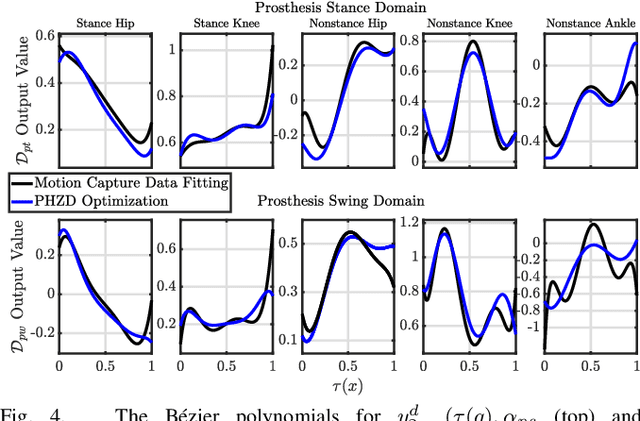
This paper proposes a data-driven method for powered prosthesis control that achieves stable walking without the need for additional sensors on the human. The key idea is to extract the nominal gait and the human interaction information from motion capture data, and reconstruct the walking behavior with a dynamic model of the human-prosthesis system. The walking behavior of a human wearing a powered prosthesis is obtained through motion capture, which yields the limb and joint trajectories. Then a nominal trajectory is obtained by solving a gait optimization problem designed to reconstruct the walking behavior observed by motion capture. Moreover, the interaction force profiles between the human and the prosthesis are recovered by simulating the model following the recorded gaits, which are then used to construct a force tube that covers all the interaction force profiles. Finally, a robust Control Lyapunov Function (CLF) Quadratic Programming (QP) controller is designed to guarantee the convergence to the nominal trajectory under all possible interaction forces within the tube. Simulation results show this controller's improved tracking performance with a perturbed force profile compared to other control methods with less model information.
Recurrent Neural Network Control of a Hybrid Dynamic Transfemoral Prosthesis with EdgeDRNN Accelerator
Mar 05, 2020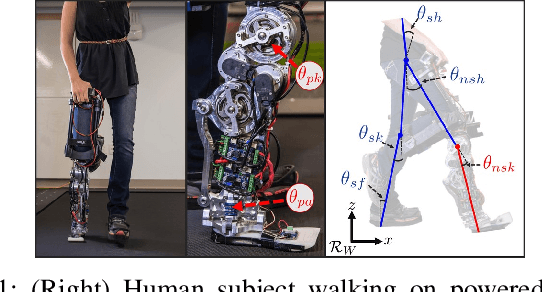
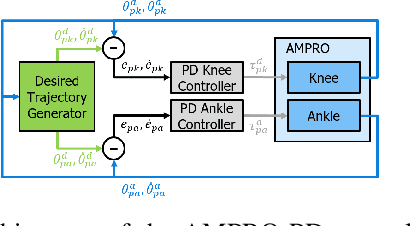
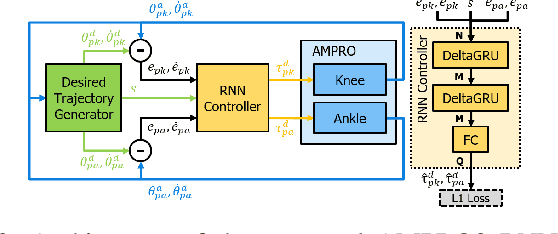
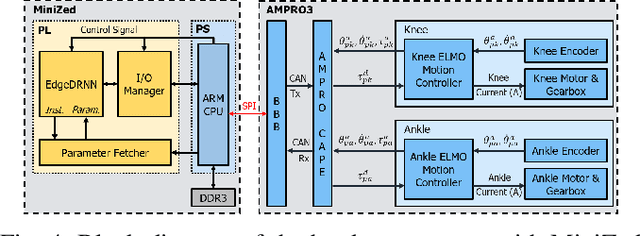
Lower leg prostheses could improve the life quality of amputees by increasing comfort and reducing energy to locomote, but currently control methods are limited in modulating behaviors based upon the human's experience. This paper describes the first steps toward learning complex controllers for dynamical robotic assistive devices. We provide the first example of behavioral cloning to control a powered transfemoral prostheses using a Gated Recurrent Unit (GRU) based recurrent neural network (RNN) running on a custom hardware accelerator that exploits temporal sparsity. The RNN is trained on data collected from the original prosthesis controller. The RNN inference is realized by a novel EdgeDRNN accelerator in real-time. Experimental results show that the RNN can replace the nominal PD controller to realize end-to-end control of the AMPRO3 prosthetic leg walking on flat ground and unforeseen slopes with comparable tracking accuracy. EdgeDRNN computes the RNN about 240 times faster than real time, opening the possibility of running larger networks for more complex tasks in the future. Implementing an RNN on this real-time dynamical system with impacts sets the ground work to incorporate other learned elements of the human-prosthesis system into prosthesis control.
Control of Separable Subsystems with Application to Prostheses
Sep 06, 2019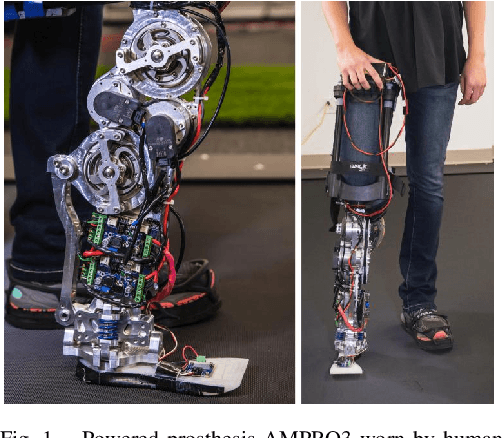
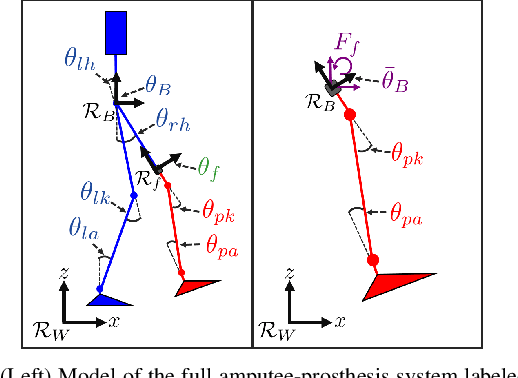
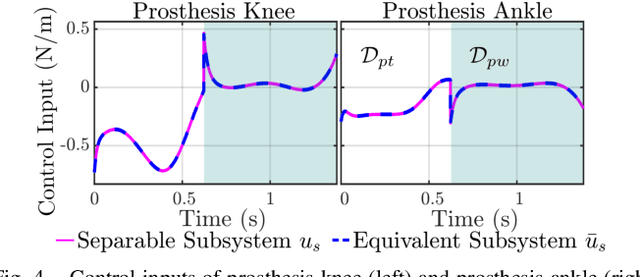
Nonlinear control methodologies have successfully realized stable human-like walking on powered prostheses. However, these methods are typically restricted to model independent controllers due to the unknown human dynamics acting on the prosthesis. This paper overcomes this restriction by introducing the notion of a separable subsystem control law, independent of the full system dynamics. By constructing an equivalent subsystem, we calculate the control law with local information. We build a subsystem model of a general open-chain manipulator to demonstrate the control method's applicability. Employing these methods for an amputee-prosthesis model, we develop a model dependent prosthesis controller that relies solely on measurable states and inputs but is equivalent to a controller developed with knowledge of the human dynamics and states.