 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Lyapunov Functions for Compliant Hybrid Zero Dynamic Walking
Jul 09, 2021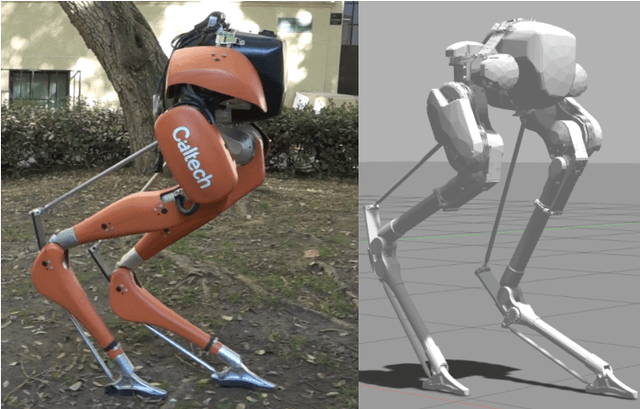
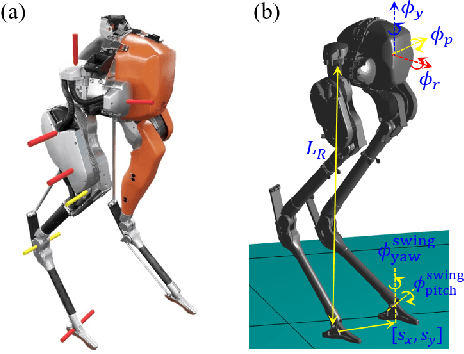
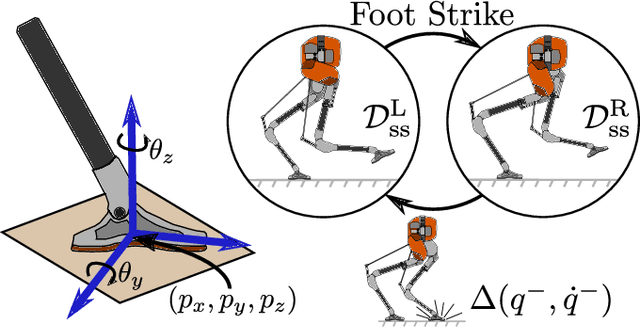
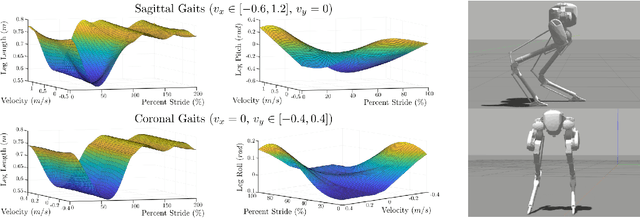
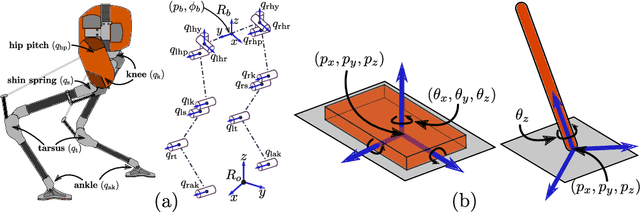
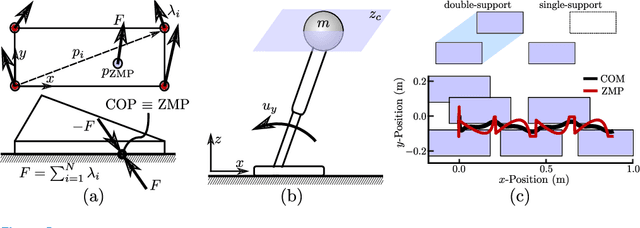
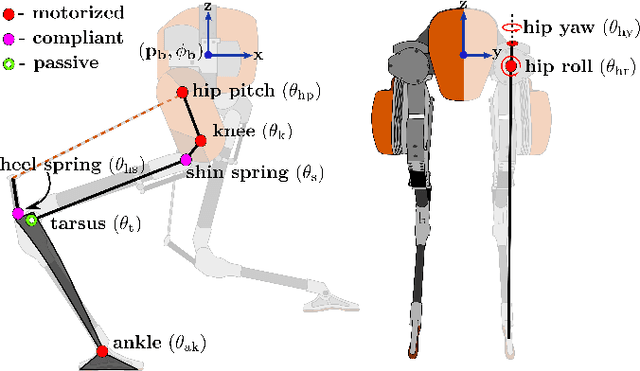
The ability to realize nonlinear controllers with formal guarantees on dynamic robotic systems has the potential to enable more complex robotic behaviors -- yet, realizing these controllers is often practically challenging. To address this challenge, this paper presents the end-to-end realization of dynamic bipedal locomotion on an underactuated bipedal robot via hybrid zero dynamics and control Lyapunov functions. A compliant model of Cassie is represented as a hybrid system to set the stage for a trajectory optimization framework. With the goal of achieving a variety of walking speeds in all directions, a library of compliant walking motions is compiled and then parameterized for efficient use within real-time controllers. Control Lyapunov functions, which have strong theoretic guarantees, are synthesized to leverage the gait library and coupled with inverse dynamics to obtain optimization-based controllers framed as quadratic programs. It is proven that this controller provably achieves stable locomotion; this is coupled with a theoretic analysis demonstrating useful properties of the controller for tuning and implementation. The proposed theoretic framework is practically demonstrated on the Cassie robot, wherein 3D walking is achieved through the use of optimization-based torque control. The experiments highlight robotic walking at different speeds and terrains, illustrating the end-to-end realization of theoretically justified nonlinear controllers on dynamic underactuated robotic systems.
Learning Controller Gains on Bipedal Walking Robots via User Preferences
Feb 25, 2021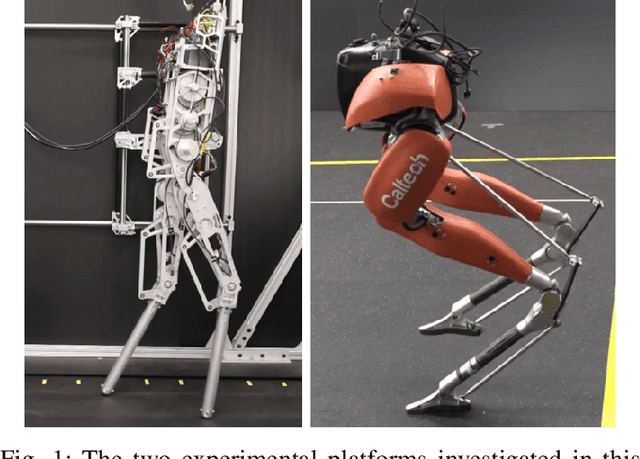
Experimental demonstration of complex robotic behaviors relies heavily on finding the correct controller gains. This painstaking process is often completed by a domain expert, requiring deep knowledge of the relationship between parameter values and the resulting behavior of the system. Even when such knowledge is possessed, it can take significant effort to navigate the nonintuitive landscape of possible parameter combinations. In this work, we explore the extent to which preference-based learning can be used to optimize controller gains online by repeatedly querying the user for their preferences. This general methodology is applied to two variants of control Lyapunov function based nonlinear controllers framed as quadratic programs, which have nice theoretic properties but are challenging to realize in practice. These controllers are successfully demonstrated both on the planar underactuated biped, AMBER, and on the 3D underactuated biped, Cassie. We experimentally evaluate the performance of the learned controllers and show that the proposed method is repeatably able to learn gains that yield stable and robust locomotion.
Global Position Control on Underactuated Bipedal Robots: Step-to-step Dynamics Approximation for Step Planning
Nov 11, 2020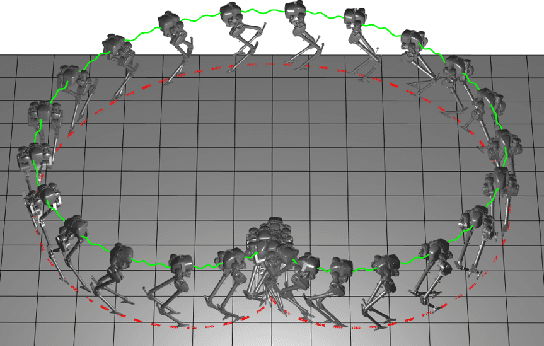
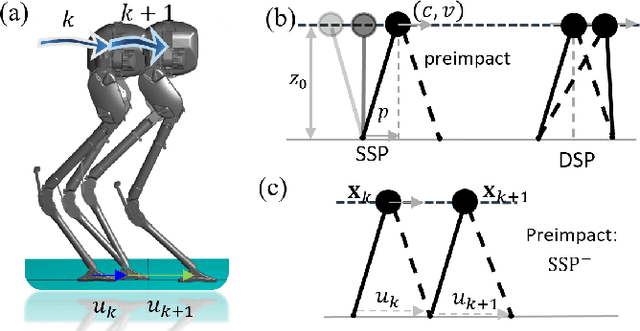
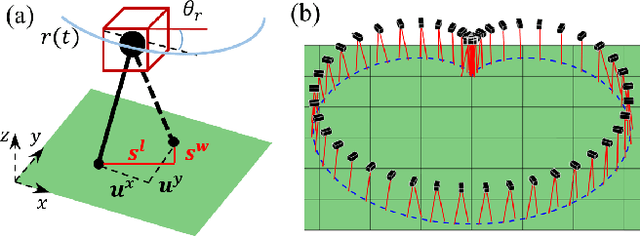
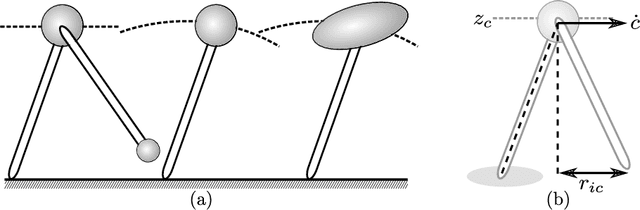
Global position control for underactuated bipedal walking is a challenging problem due to the lack of actuation on the feet of the robots. In this paper, we apply the Hybrid-Linear Inverted Pendulum (H-LIP) based stepping on 3D underactuated bipedal robots for global position control. The step-to-step (S2S) dynamics of the H-LIP walking approximates the actual S2S dynamics of the walking of the robot, where the step size is considered as the input. Thus the feedback controller based on the H-LIP approximately controls the robot to behave like the H-LIP, the differences between which stay in an error invariant set. Model Predictive Control (MPC) is applied to the H-LIP for global position control in 3D. The H-LIP stepping then generates desired step sizes for the robot to track. Moreover, turning behavior is integrated with the step planning. The proposed framework is verified on the 3D underactuated bipedal robot Cassie in simulation together with a proof-of-concept experiment.
Inverse Dynamics Control of Compliant Hybrid Zero Dynamic Walking
Oct 18, 2020
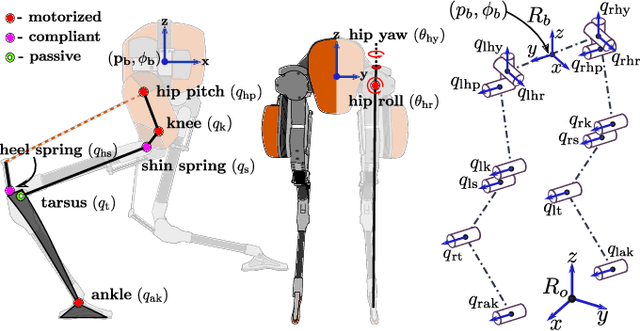
We present a trajectory planning and control architecture for bipedal locomotion at a variety of speeds on a highly underactuated and compliant bipedal robot. A library of compliant walking trajectories are planned offline, and stored as compact arrays of polynomial coefficients for tracking online. The control implementation uses a floating-base inverse dynamics controller which generates dynamically consistent feedforward torques to realize walking using information obtained from the trajectory optimization. The effectiveness of the controller is demonstrated in simulation and on hardware for walking both indoors on flat terrain and over unplanned disturbances outdoors. Additionally, both the controller and optimization source code are made available on GitHub.
Dynamic Walking: Toward Agile and Efficient Bipedal Robots
Oct 15, 2020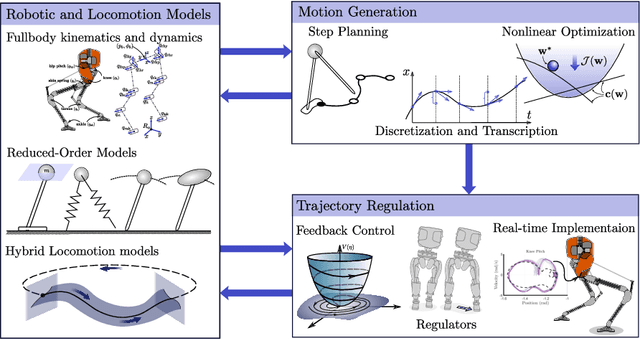
Dynamic walking on bipedal robots has evolved from an idea in science fiction to a practical reality. This is due to continued progress in three key areas: a mathematical understanding of locomotion, the computational ability to encode this mathematics through optimization, and the hardware capable of realizing this understanding in practice. In this context, this review article outlines the end-to-end process of methods which have proven effective in the literature for achieving dynamic walking on bipedal robots. We begin by introducing mathematical models of locomotion, from reduced order models that capture essential walking behaviors to hybrid dynamical systems that encode the full order continuous dynamics along with discrete footstrike dynamics. These models form the basis for gait generation via (nonlinear) optimization problems. Finally, models and their generated gaits merge in the context of real-time control, wherein walking behaviors are translated to hardware. The concepts presented are illustrated throughout in simulation, and experimental instantiation on multiple walking platforms are highlighted to demonstrate the ability to realize dynamic walking on bipedal robots that is agile and efficient.
An Inverse Dynamics Approach to Control Lyapunov Functions
Oct 23, 2019
With the goal of moving towards implementation of increasingly dynamic behaviors on underactuated systems, this paper presents an optimization-based approach for solving full-body dynamics based controllers on underactuated bipedal robots. The primary focus of this paper is on the development of an alternative approach to the implementation of controllers utilizing control Lyapunov function based quadratic programs. This approach utilizes many of the desirable aspects from successful inverse dynamics based controllers in the literature, while also incorporating a variant of control Lyapunov functions that renders better convergence in the context of tracking outputs. The principal benefits of this formulation include a greater ability to add costs which regulate the resulting behavior of the robot, in addition, the model error-prone inertia matrix is used only once, in a non-inverted form. The result is a successful demonstration of the controller for walking in simulation, and applied on hardware in real-time for crouching.
Control of Separable Subsystems with Application to Prostheses
Sep 06, 2019
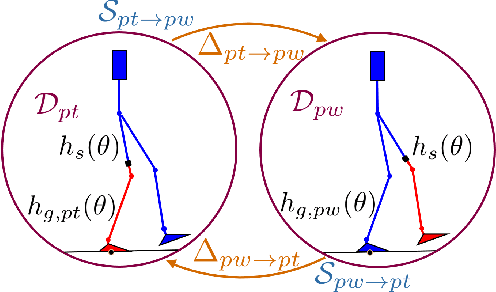
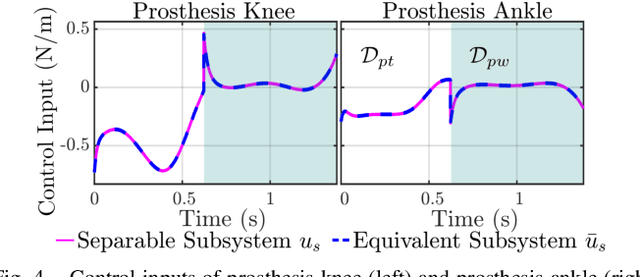
Nonlinear control methodologies have successfully realized stable human-like walking on powered prostheses. However, these methods are typically restricted to model independent controllers due to the unknown human dynamics acting on the prosthesis. This paper overcomes this restriction by introducing the notion of a separable subsystem control law, independent of the full system dynamics. By constructing an equivalent subsystem, we calculate the control law with local information. We build a subsystem model of a general open-chain manipulator to demonstrate the control method's applicability. Employing these methods for an amputee-prosthesis model, we develop a model dependent prosthesis controller that relies solely on measurable states and inputs but is equivalent to a controller developed with knowledge of the human dynamics and states.