 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Robotic-assisted Frameworks for Endomicroscopy Scanning in Retinal Surgeries
Sep 15, 2019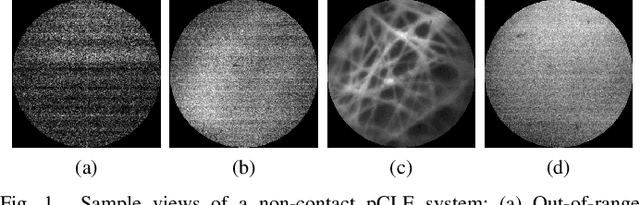
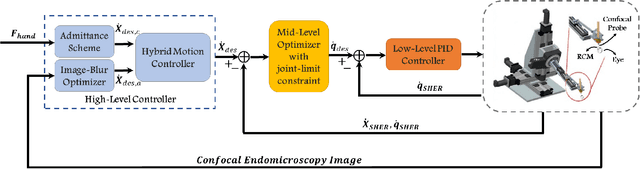
High-resolution real-time imaging at cellular levelin retinal surgeries is very challenging due to extremely confinedspace within the eyeball and lack of appropriate modalities.Probe-based confocal laser endomicroscopy (pCLE) system,which has a small footprint and provides highly-magnified im-ages, can be a potential imaging modality for improved diagnosis.The ability to visualize in cellular-level the retinal pigmentepithelium and the chorodial blood vessels underneath canprovide useful information for surgical outcomes in conditionssuch as retinal detachment. However, the adoption of pCLE islimited due to narrow field of view and micron-level range offocus. The physiological tremor of surgeons' hand also deterioratethe image quality considerably and leads to poor imaging results. In this paper, a novel image-based hybrid motion controlapproach is proposed to mitigate challenges of using pCLEin retinal surgeries. The proposed framework enables sharedcontrol of the pCLE probe by a surgeon to scan the tissueprecisely without hand tremors and an auto-focus image-basedcontrol algorithm that optimizes quality of pCLE images. Thecontrol strategy is deployed on two semi-autonomous frameworks: cooperative and teleoperated. Both frameworks consist of theSteady-Hand Eye Robot (SHER), whose end-effector holds thepCLE probe...