 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Coordination and Planning in Uncertain and Adversarial Environments
May 02, 2021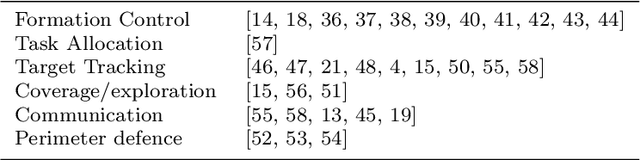
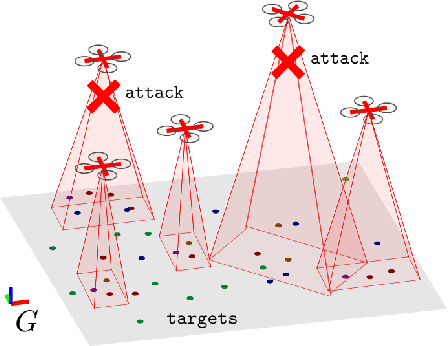
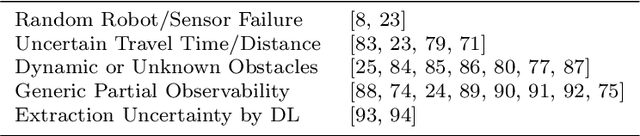
Deploying a team of robots that can carefully coordinate their actions can make the entire system robust to individual failures. In this report, we review recent algorithmic development in making multi-robot systems robust to environmental uncertainties, failures, and adversarial attacks. We find the following three trends in the recent research in the area of multi-robot coordination: (1) resilient coordination to either withstand failures and/or attack or recover from failures/attacks; (2) risk-aware coordination to manage the trade-off risk and reward, where the risk stems due to environmental uncertainty; (3) Graph Neural Networks based coordination to learn decentralized multi-robot coordination policies. These algorithms have been applied to tasks such as formation control, task assignment and scheduling, search and planning, and informative data collection. In order for multi-robot systems to become practical, we need coordination algorithms that can scale to large teams of robots dealing with dynamically changing, failure-prone, contested, and uncertain environments. There has been significant recent research on multi-robot coordination that has contributed resilient and risk-aware algorithms to deal with these issues and reduce the gap between theory and practice. Learning-based approaches have been seen to be promising, especially since they can learn who, when, and how to communicate for effective coordination. However, these algorithms have also been shown to be vulnerable to adversarial attacks, and as such developing learning-based coordination strategies that are resilient to such attacks and robust to uncertainties is an important open area of research.
Risk-Aware Path Planning for Ground Vehicles using Occluded Aerial Images
Apr 23, 2021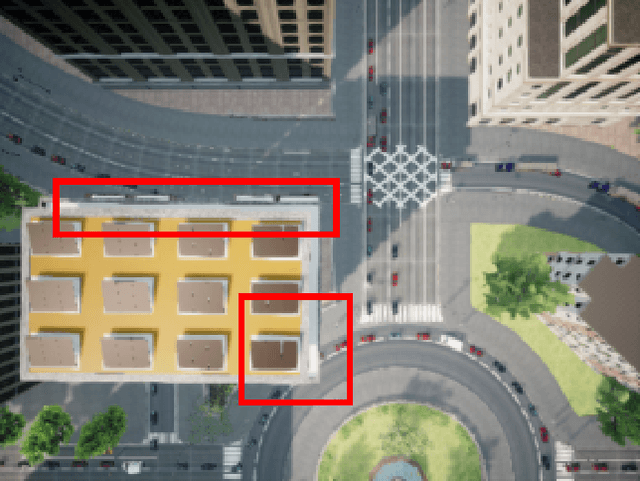
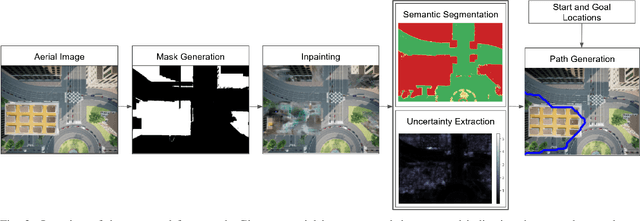
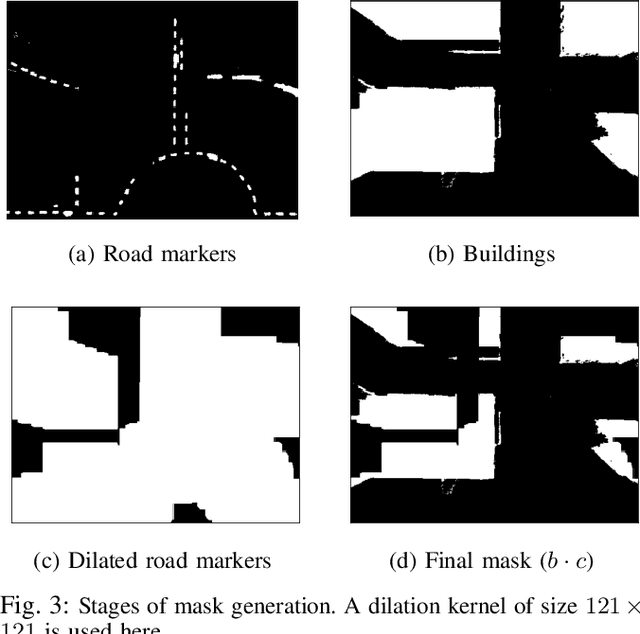
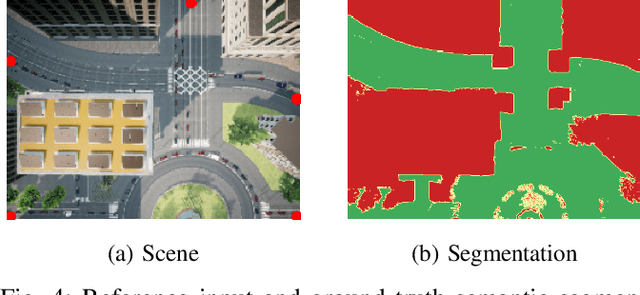
We consider scenarios where a ground vehicle plans its path using data gathered by an aerial vehicle. In the aerial images, navigable areas of the scene may be occluded due to obstacles. Naively planning paths using aerial images may result in longer paths as a conservative planner may try to avoid regions that are occluded. We propose a modular, deep learning-based framework that allows the robot to predict the existence of navigable areas in the occluded regions. Specifically, we use image inpainting methods to fill in parts of the areas that are potentially occluded, which can then be semantically segmented to determine navigability. We use supervised neural networks for both modules. However, these predictions may be incorrect. Therefore, we extract uncertainty in these predictions and use a risk-aware approach that takes these uncertainties into account for path planning. We compare modules in our approach with non-learning-based approaches to show the efficacy of the proposed framework through photo-realistic simulations. The modular pipeline allows further improvement in path planning and deployment in different settings.
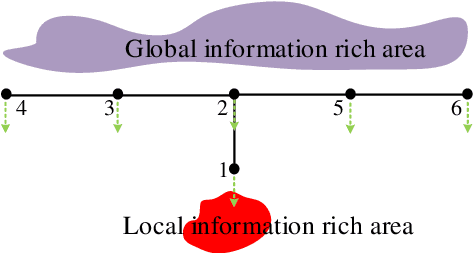
Multi-robot Symmetric Rendezvous Search on the Line
Jan 28, 2021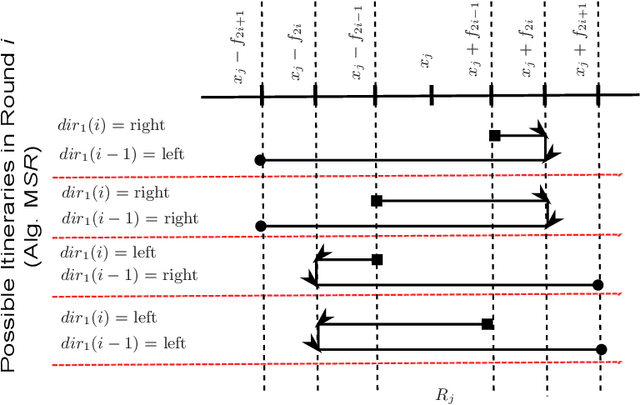
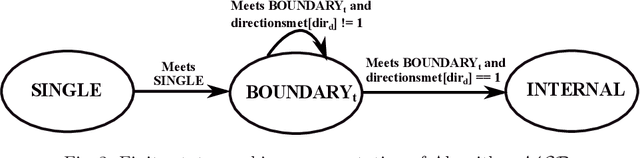
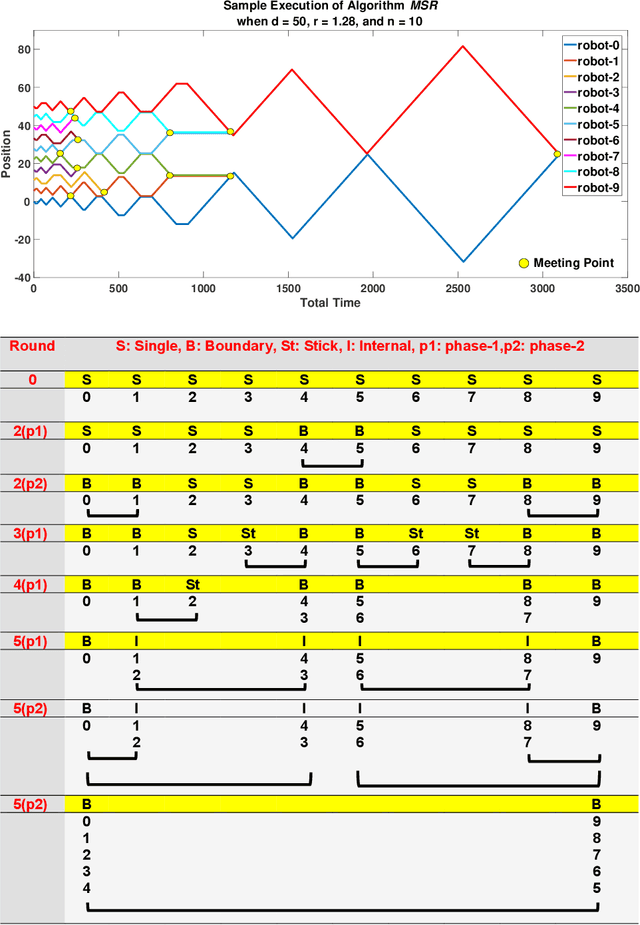
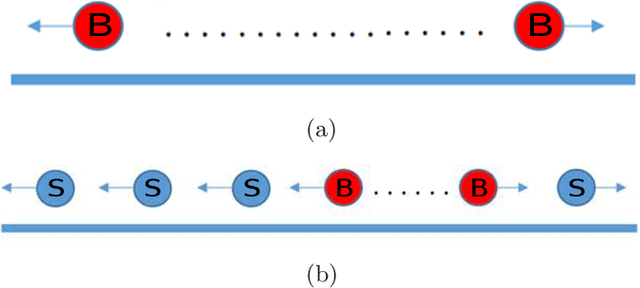
We study the Symmetric Rendezvous Search Problem for a multi-robot system. There are $n>2$ robots arbitrarily located on a line. Their goal is to meet somewhere on the line as quickly as possible. The robots do not know the initial location of any of the other robots or their own positions on the line. The symmetric version of the problem requires the robots to execute the same search strategy to achieve rendezvous. Therefore, we solve the problem in an online fashion with a randomized strategy. In this paper, we present a symmetric rendezvous algorithm which achieves a constant competitive ratio for the total distance traveled by the robots. We validate our theoretical results through simulations.
GATSBI: An Online GTSP-Based Algorithm for Targeted Surface Bridge Inspection
Dec 09, 2020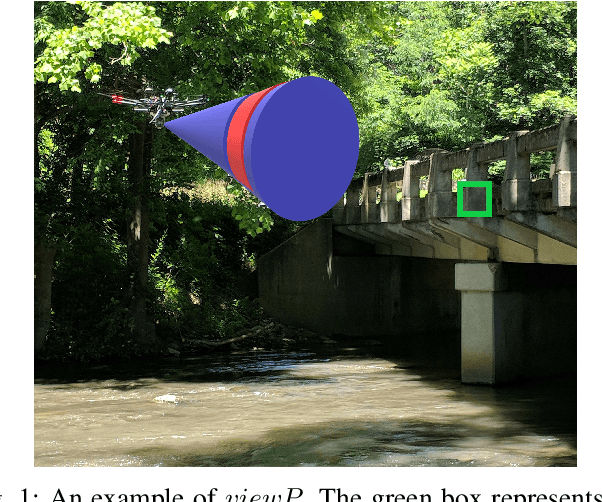
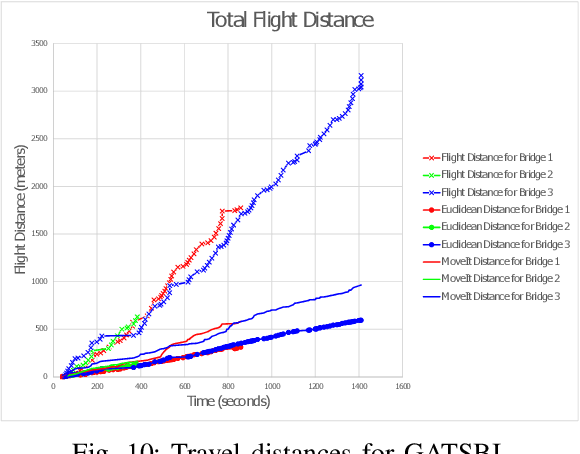
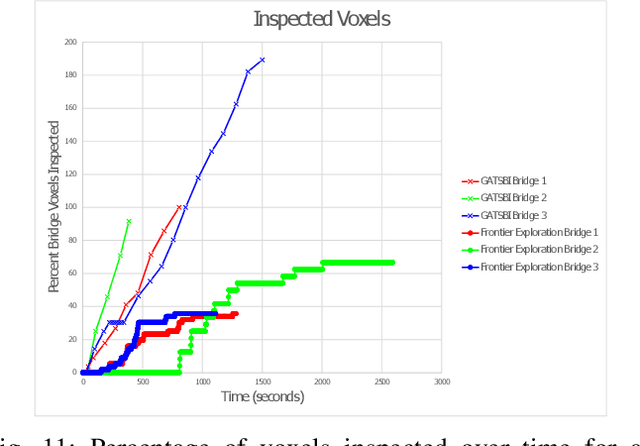
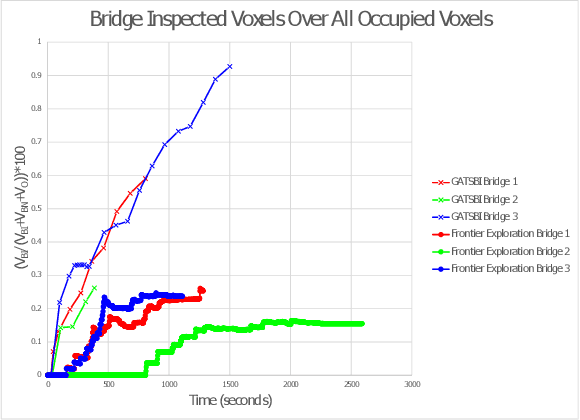
We study the problem of visually inspecting the surface of a bridge using an Unmanned Aerial Vehicle (UAV) for defects. We do not assume that the geometric model of the bridge is known. The UAV is equipped with a LiDAR and RGB sensor that is used to build a 3D semantic map of the environment. Our planner, termed GATSBI, plans in an online fashion a path that is targeted towards inspecting all points on the surface of the bridge. The input to GATSBI consists of a 3D occupancy grid map of the part of the environment seen by the UAV so far. We use semantic segmentation to segment the voxels into those that are part of the bridge and the surroundings. Inspecting a bridge voxel requires the UAV to take images from a desired viewing angle and distance. We then create a Generalized Traveling Salesperson Problem (GTSP) instance to cluster candidate viewpoints for inspecting the bridge voxels and use an off-the-shelf GTSP solver to find the optimal path for the given instance. As more parts of the environment are seen, we replan the path. We evaluate the performance of our algorithm through high-fidelity simulations conducted in Gazebo. We compare the performance of this algorithm with a frontier exploration algorithm. Our evaluation reveals that targeting the inspection to only the segmented bridge voxels and planning carefully using a GTSP solver leads to more efficient inspection than the baseline algorithms.
Communication-Aware Multi-robot Coordination with Submodular Maximization
Nov 03, 2020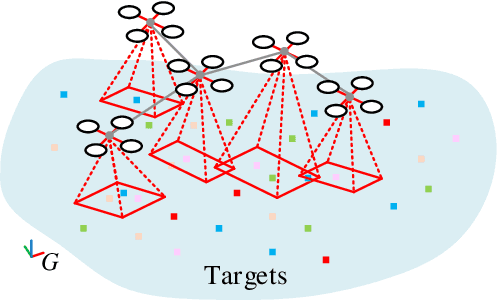
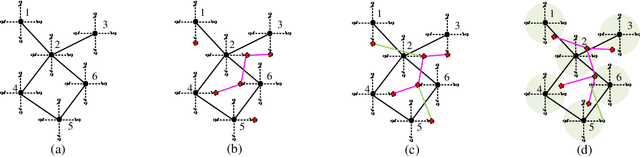
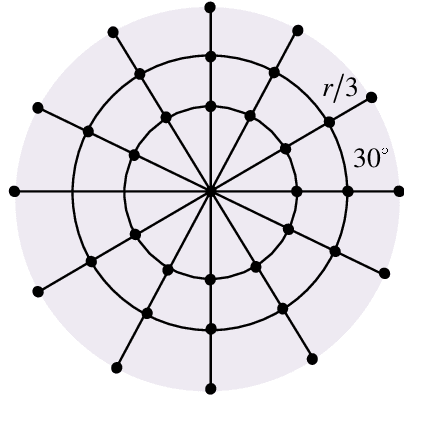
Submodular maximization has been widely used in many multi-robot task planning problems including information gathering, exploration, and target tracking. However, the interplay between submodular maximization and communication is rarely explored in the multi-robot setting. In many cases, maximizing the submodular objective may drive the robots in a way so as to disconnect the communication network. Driven by such observations, in this paper, we consider the problem of maximizing submodular function with connectivity constraints. Specifically, we propose a problem called Communication-aware Submodular Maximization (CSM), in which communication maintenance and submodular maximization are jointly considered in the decision-making process. One heuristic algorithm that consists of two stages, i.e. \textit{topology generation} and \textit{deviation minimization} is proposed. We validate the formulation and algorithm through numerical simulation. We find that our algorithm on average suffers only slightly performance decrease compared to the pure greedy strategy.
Multi-Agent Reinforcement Learning for Persistent Monitoring
Nov 02, 2020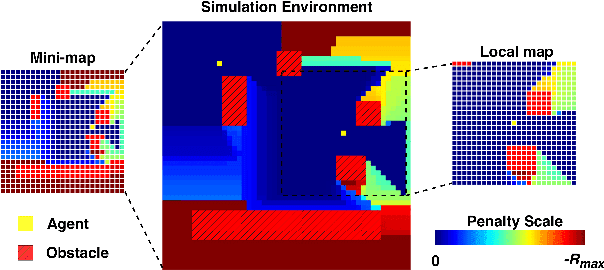
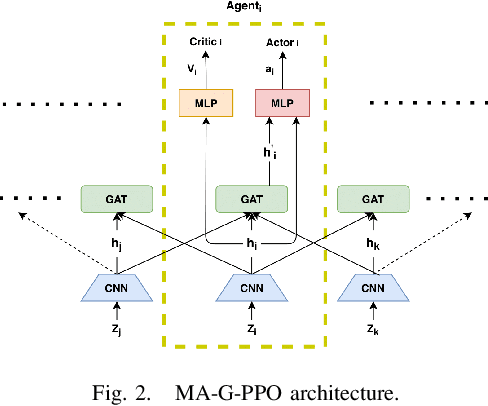
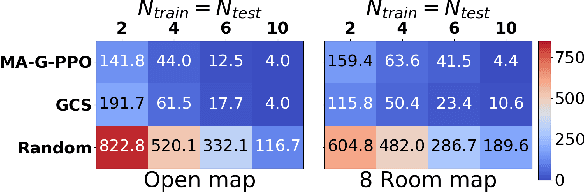
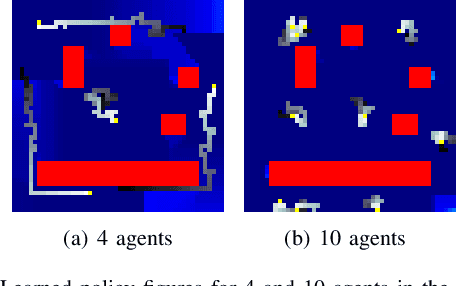
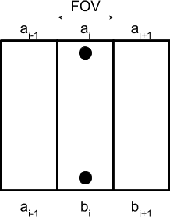
The Persistent Monitoring (PM) problem seeks to find a set of trajectories (or controllers) for robots to persistently monitor a changing environment. Each robot has a limited field-of-view and may need to coordinate with others to ensure no point in the environment is left unmonitored for long periods of time. We model the problem such that there is a penalty that accrues every time step if a point is left unmonitored. However, the dynamics of the penalty are unknown to us. We present a Multi-Agent Reinforcement Learning (MARL) algorithm for the persistent monitoring problem. Specifically, we present a Multi-Agent Graph Attention Proximal Policy Optimization (MA-G-PPO) algorithm that takes as input the local observations of all agents combined with a low resolution global map to learn a policy for each agent. The graph attention allows agents to share their information with others leading to an effective joint policy. Our main focus is to understand how effective MARL is for the PM problem. We investigate five research questions with this broader goal. We find that MA-G-PPO is able to learn a better policy than the non-RL baseline in most cases, the effectiveness depends on agents sharing information with each other, and the policy learnt shows emergent behavior for the agents.
Risk-Aware Submodular Optimization for Multi-objective Travelling Salesperson Problem
Nov 02, 2020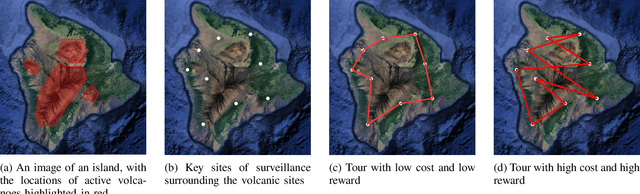
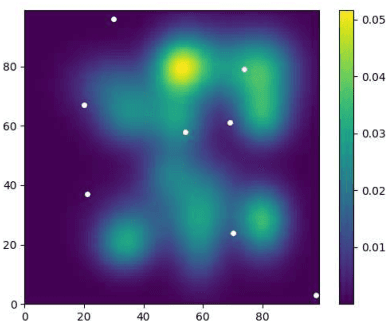
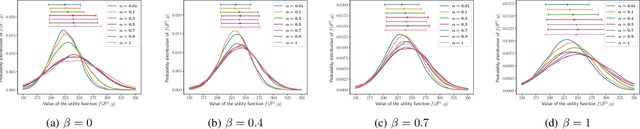
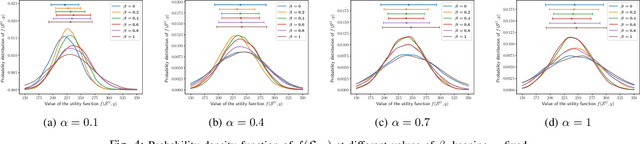
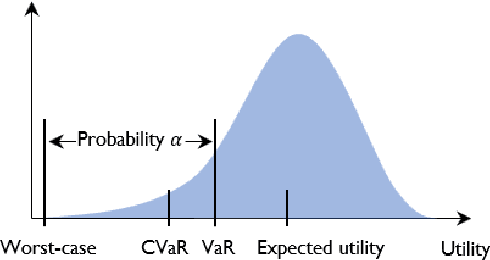
We introduce a risk-aware multi-objective Traveling Salesperson Problem (TSP) variant, where the robot tour cost and tour reward have to be optimized simultaneously. The robot obtains reward along the edges in the graph. We study the case where the rewards and the costs exhibit diminishing marginal gains, i.e., are submodular. Unlike prior work, we focus on the scenario where the costs and the rewards are uncertain and seek to maximize the Conditional-Value-at-Risk (CVaR) metric of the submodular function. We propose a risk-aware greedy algorithm (RAGA) to find a bounded-approximation algorithm. The approximation algorithm runs in polynomial time and is within a constant factor of the optimal and an additive term that depends on the optimal solution. We use the submodular function's curvature to improve approximation results further and verify the algorithm's performance through simulations.
Fast Biconnectivity Restoration in Multi-Robot Systems for Robust Communication Maintenance
Nov 02, 2020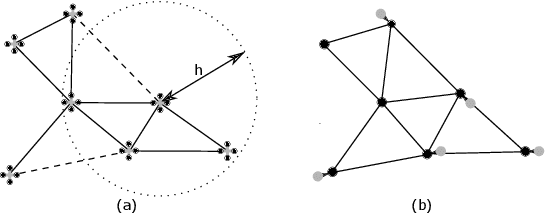
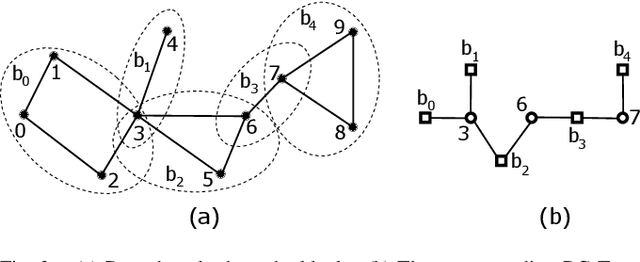
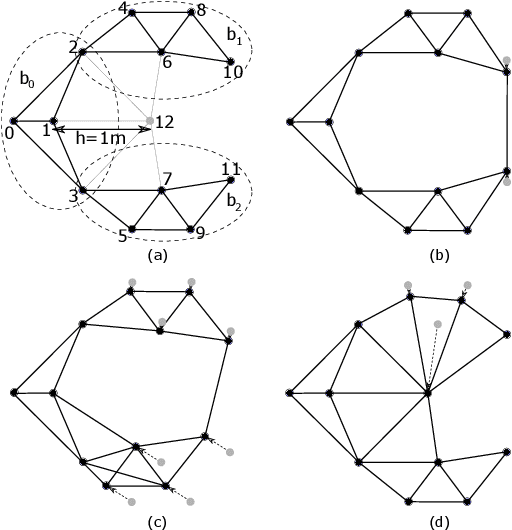
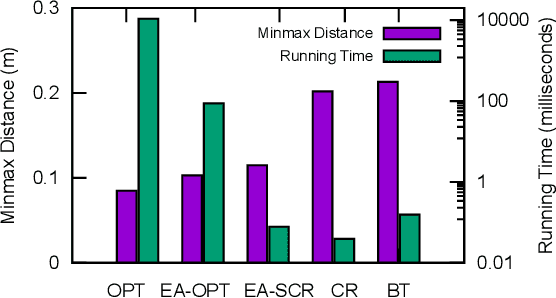
Maintaining a robust communication network plays an important role in the success of a multi-robot team jointly performing an optimization task. A key characteristic of a robust multi-robot system is the ability to repair the communication topology itself in the case of robot failure. In this paper, we focus on the Fast Biconnectivity Restoration (FBR) problem, which aims to repair a connected network to make it biconnected as fast as possible, where a biconnected network is a communication topology that cannot be disconnected by removing one node. We develop a Quadratically Constrained Program (QCP) formulation of the FBR problem, which provides a way to optimally solve the problem. We also propose an approximation algorithm for the FBR problem based on graph theory. By conducting empirical studies, we demonstrate that our proposed approximation algorithm performs close to the optimal while significantly outperforming the existing solutions.
Coverage of an Environment Using Energy-Constrained Unmanned Aerial Vehicles
Jul 07, 2020

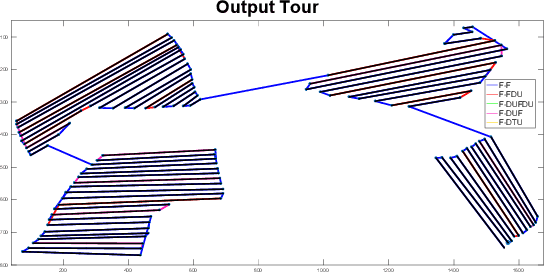
We study the problem of covering an environment using an Unmanned Aerial Vehicle (UAV) with limited battery capacity. We consider a scenario where the UAV can land on an Unmanned Ground Vehicle (UGV) and recharge the onboard battery. The UGV can also recharge the UAV while transporting the UAV to the next take-off site. We present an algorithm to solve a new variant of the area coverage problem that takes into account this symbiotic UAV and UGV system. The input consists of a set of boustrophedon cells -- rectangular strips whose width is equal to the field-of-view of the sensor on the UAV. The goal is to find a coordinated strategy for the UAV and UGV that visits and covers all cells in minimum time, while optimally finding how much to recharge, where to recharge, and when to recharge the battery. This includes flight time for visiting and covering all cells, recharging time, as well as the take-off and landing times. We show how to reduce this problem to a known NP-hard problem, Generalized Traveling Salesperson Problem (GTSP). Given an optimal GTSP solver, our approach finds the optimal coverage paths for the UAV and UGV. Our formulation models multi-rotor UAVs as well as hybrid UAVs that can operate in fixed-wing and Vertical Take-off and Landing modes. We evaluate our algorithm through simulations and proof-of-concept experiments.
Improved Resilient Coverage Maximization with Multiple Robots
Jul 04, 2020
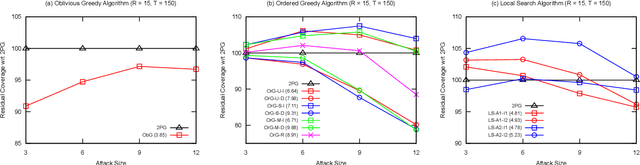
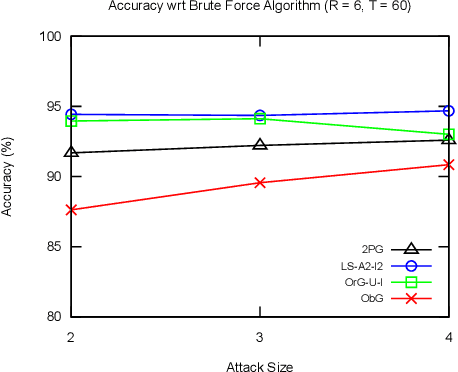
The task of maximizing coverage using multiple robots has several applications such as surveillance, exploration, and environmental monitoring. A major challenge of deploying such multi-robot systems in a practical scenario is to ensure resilience against robot failures. A recent work [1] introduced the Resilient Coverage Maximization (RCM) problem where the goal is to maximize a submodular coverage utility when the robots are subject to adversarial attacks and/or failures. The RCM problem is known to be NP-hard. The state-of-the-art solution of the RCM problem [1] employs a greedy approximation strategy with theoretical performance guarantees. In this paper, we propose two approximation algorithms for the RCM problem, both of which empirically outperform the existing solution in terms of accuracy and/or execution time. To demonstrate the effectiveness of our proposed solution, we empirically compare our proposed algorithms with the existing solution and brute force optimum algorithm.