 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Adapting Recurrent Models for Object Pushing from Learning in Simulation
Jul 27, 2020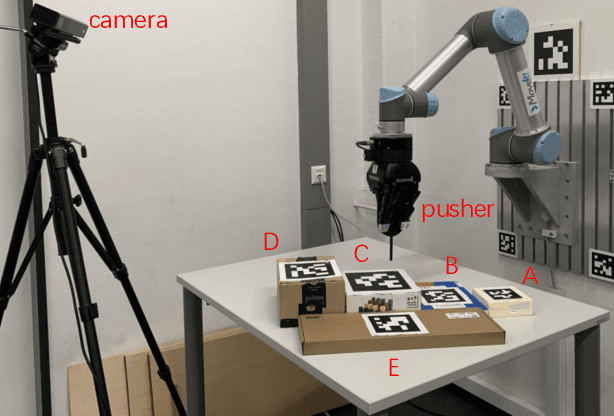
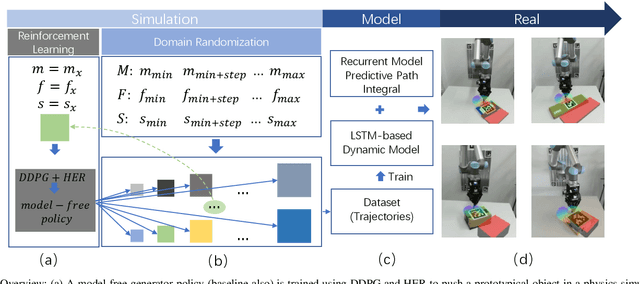
Planar pushing remains a challenging research topic, where building the dynamic model of the interaction is the core issue. Even an accurate analytical dynamic model is inherently unstable because physics parameters such as inertia and friction can only be approximated. Data-driven models usually rely on large amounts of training data, but data collection is time consuming when working with real robots. In this paper, we collect all training data in a physics simulator and build an LSTM-based model to fit the pushing dynamics. Domain Randomization is applied to capture the pushing trajectories of a generalized class of objects. When executed on the real robot, the trained recursive model adapts to the tracked object's real dynamics within a few steps. We propose the algorithm \emph{Recurrent} Model Predictive Path Integral (RMPPI) as a variation of the original MPPI approach, employing state-dependent recurrent models. As a comparison, we also train a Deep Deterministic Policy Gradient (DDPG) network as a model-free baseline, which is also used as the action generator in the data collection phase. During policy training, Hindsight Experience Replay is used to improve exploration efficiency. Pushing experiments on our UR5 platform demonstrate the model's adaptability and the effectiveness of the proposed framework.
A Mobile Robot Hand-Arm Teleoperation System by Vision and IMU
Mar 11, 2020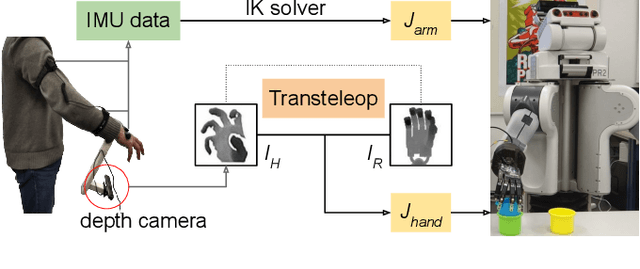
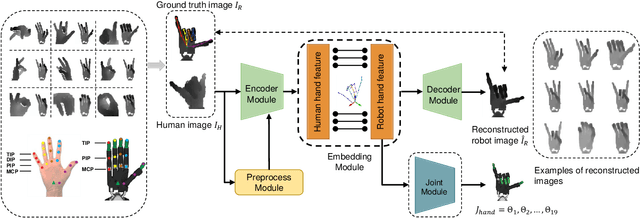
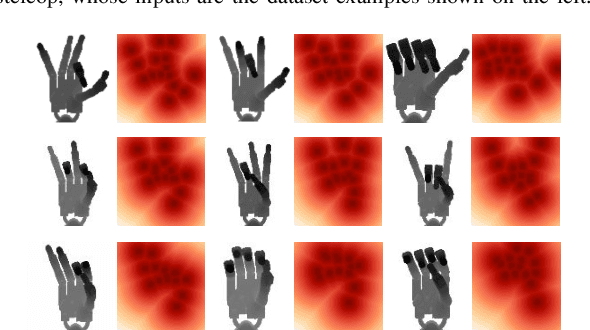
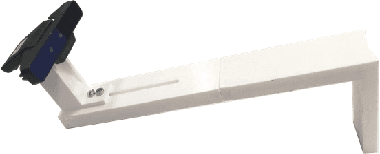
In this paper, we present a multimodal mobile teleoperation system that consists of a novel vision-based hand pose regression network (Transteleop) and an IMU-based arm tracking method. Transteleop observes the human hand through a low-cost depth camera and generates not only joint angles but also depth images of paired robot hand poses through an image-to-image translation process. A keypoint-based reconstruction loss explores the resemblance in appearance and anatomy between human and robotic hands and enriches the local features of reconstructed images. A wearable camera holder enables simultaneous hand-arm control and facilitates the mobility of the whole teleoperation system. Network evaluation results on a test dataset and a variety of complex manipulation tasks that go beyond simple pick-and-place operations show the efficiency and stability of our multimodal teleoperation system.
Vision-based Teleoperation of Shadow Dexterous Hand using End-to-End Deep Neural Network
Feb 18, 2019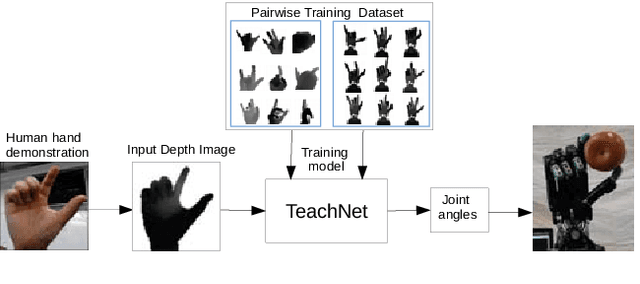
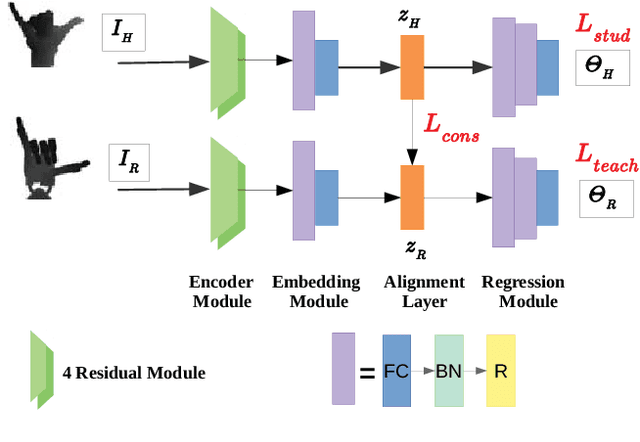

In this paper, we present TeachNet, a novel neural network architecture for intuitive and markerless vision-based teleoperation of dexterous robotic hands. Robot joint angles are directly generated from depth images of the human hand that produce visually similar robot hand poses in an end-to-end fashion. The special structure of TeachNet, combined with a consistency loss function, handles the differences in appearance and anatomy between human and robotic hands. A synchronized human-robot training set is generated from an existing dataset of labeled depth images of the human hand and simulated depth images of a robotic hand. The final training set includes 400K pairwise depth images and joint angles of a Shadow C6 robotic hand. The network evaluation results verify the superiority of TeachNet, especially regarding the high-precision condition. Imitation experiments and grasp tasks teleoperated by novice users demonstrate that TeachNet is more reliable and faster than the state-of-the-art vision-based teleoperation method.