 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Depth Image Registration incorporating Nonvisual Information
May 01, 2015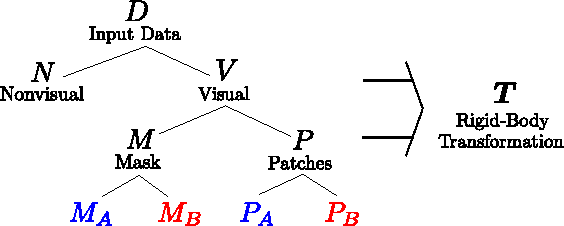
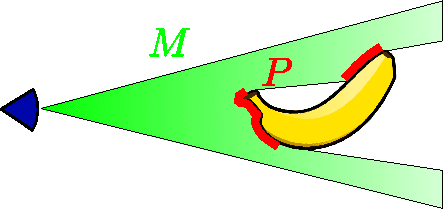
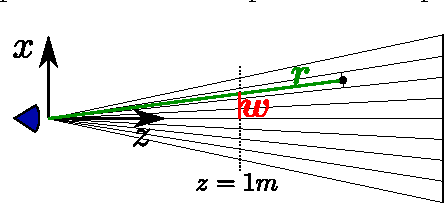
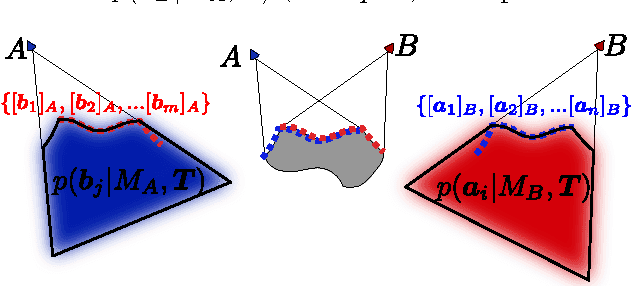
In this paper, we derive a probabilistic registration algorithm for object modeling and tracking. In many robotics applications, such as manipulation tasks, nonvisual information about the movement of the object is available, which we will combine with the visual information. Furthermore we do not only consider observations of the object, but we also take space into account which has been observed to not be part of the object. Furthermore we are computing a posterior distribution over the relative alignment and not a point estimate as typically done in for example Iterative Closest Point (ICP). To our knowledge no existing algorithm meets these three conditions and we thus derive a novel registration algorithm in a Bayesian framework. Experimental results suggest that the proposed methods perform favorably in comparison to PCL implementations of feature mapping and ICP, especially if nonvisual information is available.
Probabilistic Object Tracking using a Range Camera
May 01, 2015
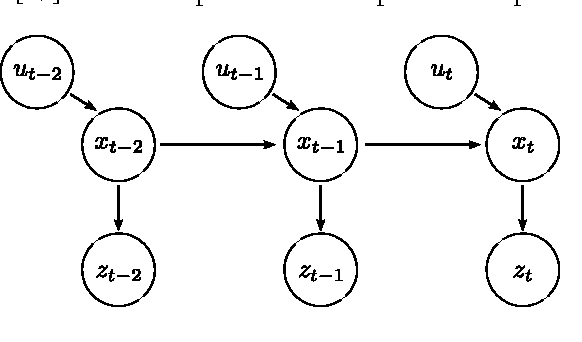
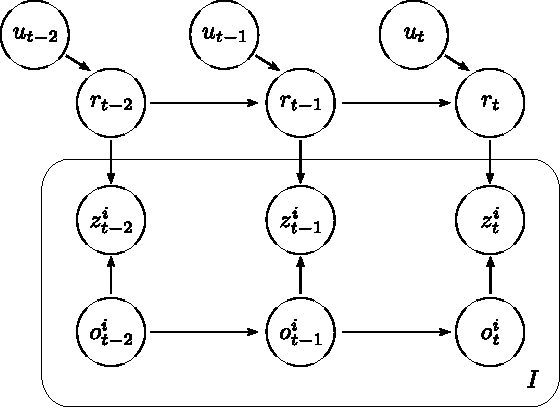

We address the problem of tracking the 6-DoF pose of an object while it is being manipulated by a human or a robot. We use a dynamic Bayesian network to perform inference and compute a posterior distribution over the current object pose. Depending on whether a robot or a human manipulates the object, we employ a process model with or without knowledge of control inputs. Observations are obtained from a range camera. As opposed to previous object tracking methods, we explicitly model self-occlusions and occlusions from the environment, e.g, the human or robotic hand. This leads to a strongly non-linear observation model and additional dependencies in the Bayesian network. We employ a Rao-Blackwellised particle filter to compute an estimate of the object pose at every time step. In a set of experiments, we demonstrate the ability of our method to accurately and robustly track the object pose in real-time while it is being manipulated by a human or a robot.
Balancing experiments on a torque-controlled humanoid with hierarchical inverse dynamics
Nov 07, 2014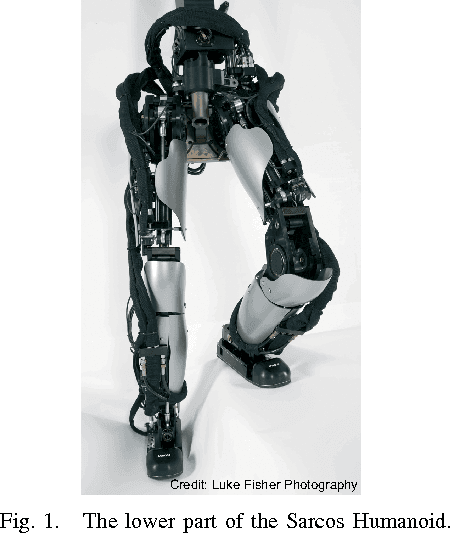
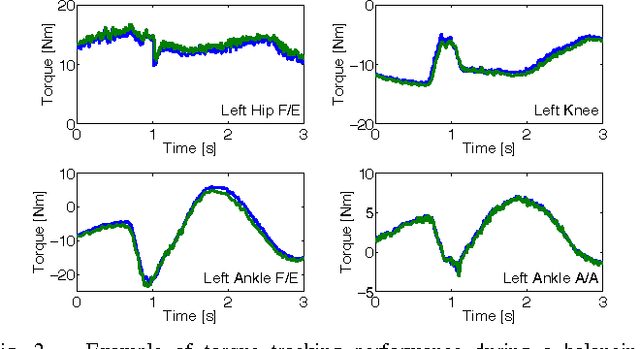
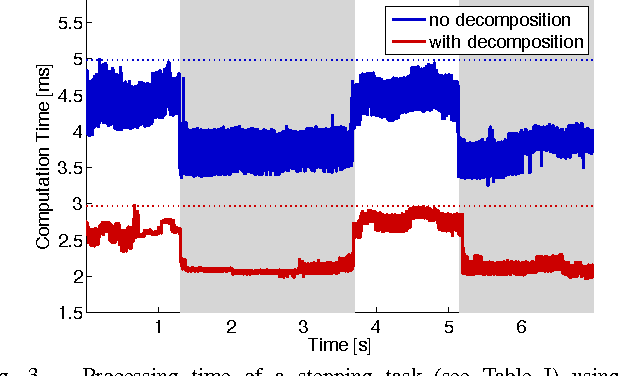
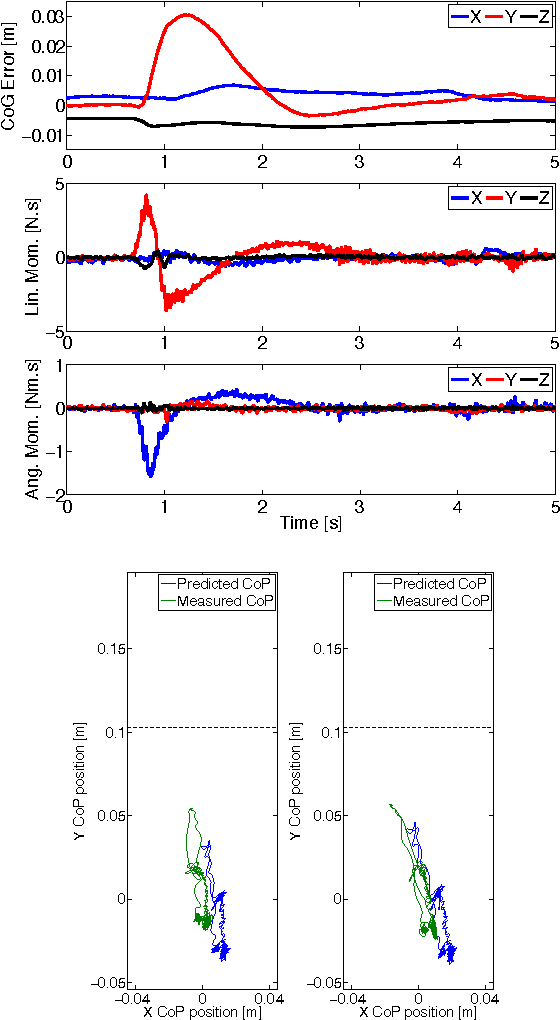
Recently several hierarchical inverse dynamics controllers based on cascades of quadratic programs have been proposed for application on torque controlled robots. They have important theoretical benefits but have never been implemented on a torque controlled robot where model inaccuracies and real-time computation requirements can be problematic. In this contribution we present an experimental evaluation of these algorithms in the context of balance control for a humanoid robot. The presented experiments demonstrate the applicability of the approach under real robot conditions (i.e. model uncertainty, estimation errors, etc). We propose a simplification of the optimization problem that allows us to decrease computation time enough to implement it in a fast torque control loop. We implement a momentum-based balance controller which shows robust performance in face of unknown disturbances, even when the robot is standing on only one foot. In a second experiment, a tracking task is evaluated to demonstrate the performance of the controller with more complicated hierarchies. Our results show that hierarchical inverse dynamics controllers can be used for feedback control of humanoid robots and that momentum-based balance control can be efficiently implemented on a real robot.