 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-in-the-Loop Uncertainty Analysis in Self-Adaptive Robots Using LLMs
May 04, 2026Self-adaptive robots operate in dynamic, unpredictable environments where unaddressed uncertainties can lead to safety violations and operational failures. However, systematically identifying and analyzing these uncertainties, including their sources, impacts, and mitigation strategies, remains a significant challenge given the inherent complexity of real-world environments, dynamic robotic behavior, and the rapid evolution of robotic technologies. To address this, we introduce RoboULM, a human-in-the-loop methodology and tool that supports practitioners in systematically exploring uncertainties at the design stage using large language models (LLMs). Moreover, we present an uncertainty taxonomy that provides a detailed catalog of uncertainties in self-adaptive robots. We evaluated RoboULM with 16 practitioners from four industrial use cases. The results show that RoboULM was perceived as both useful and easy to understand, with the participants particularly valuing structured prompting and iterative refinement support. These findings demonstrate the potential of RoboULM as a viable solution for systematic uncertainty analysis in complex robots.
Software Engineering for Self-Adaptive Robotics: A Research Agenda
May 26, 2025Self-adaptive robotic systems are designed to operate autonomously in dynamic and uncertain environments, requiring robust mechanisms to monitor, analyse, and adapt their behaviour in real-time. Unlike traditional robotic software, which follows predefined logic, self-adaptive robots leverage artificial intelligence, machine learning, and model-driven engineering to continuously adjust to changing operational conditions while ensuring reliability, safety, and performance. This paper presents a research agenda for software engineering in self-adaptive robotics, addressing critical challenges across two key dimensions: (1) the development phase, including requirements engineering, software design, co-simulation, and testing methodologies tailored to adaptive robotic systems, and (2) key enabling technologies, such as digital twins, model-driven engineering, and AI-driven adaptation, which facilitate runtime monitoring, fault detection, and automated decision-making. We discuss open research challenges, including verifying adaptive behaviours under uncertainty, balancing trade-offs between adaptability, performance, and safety, and integrating self-adaptation frameworks like MAPE-K. By providing a structured roadmap, this work aims to advance the software engineering foundations for self-adaptive robotic systems, ensuring they remain trustworthy, efficient, and capable of handling real-world complexities.
Identifying Uncertainty in Self-Adaptive Robotics with Large Language Models
Apr 29, 2025Future self-adaptive robots are expected to operate in highly dynamic environments while effectively managing uncertainties. However, identifying the sources and impacts of uncertainties in such robotic systems and defining appropriate mitigation strategies is challenging due to the inherent complexity of self-adaptive robots and the lack of comprehensive knowledge about the various factors influencing uncertainty. Hence, practitioners often rely on intuition and past experiences from similar systems to address uncertainties. In this article, we evaluate the potential of large language models (LLMs) in enabling a systematic and automated approach to identify uncertainties in self-adaptive robotics throughout the software engineering lifecycle. For this evaluation, we analyzed 10 advanced LLMs with varying capabilities across four industrial-sized robotics case studies, gathering the practitioners' perspectives on the LLM-generated responses related to uncertainties. Results showed that practitioners agreed with 63-88% of the LLM responses and expressed strong interest in the practicality of LLMs for this purpose.
Model-Based Monitoring and State Estimation for Digital Twins: The Kalman Filter
Apr 29, 2023

A digital twin (DT) monitors states of the physical twin (PT) counterpart and provides a number of benefits such as advanced visualizations, fault detection capabilities, and reduced maintenance cost. It is the ability to be able to detect the states inside the DT that enable such benefits. In order to estimate the desired states of a PT, we propose the use of a Kalman Filter (KF). In this tutorial, we provide an introduction and detailed derivation of the KF. We demonstrate the use of KF to monitor and anomaly detection through an incubator system. Our experimental result shows that KF successfully can detect the anomaly during monitoring.
Constructing Neural Network-Based Models for Simulating Dynamical Systems
Nov 02, 2021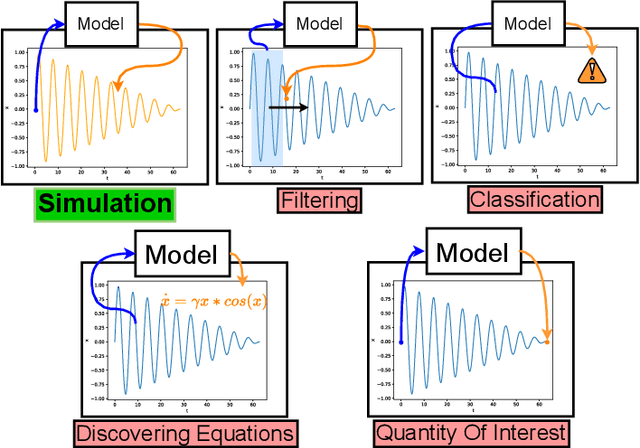

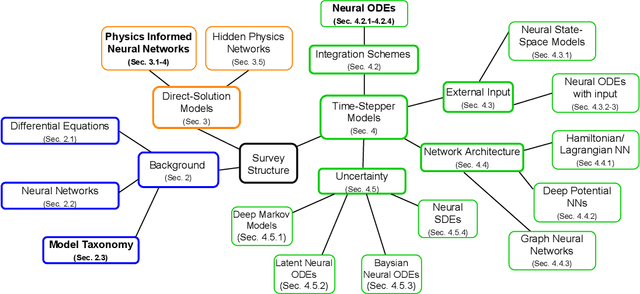
Dynamical systems see widespread use in natural sciences like physics, biology, chemistry, as well as engineering disciplines such as circuit analysis, computational fluid dynamics, and control. For simple systems, the differential equations governing the dynamics can be derived by applying fundamental physical laws. However, for more complex systems, this approach becomes exceedingly difficult. Data-driven modeling is an alternative paradigm that seeks to learn an approximation of the dynamics of a system using observations of the true system. In recent years, there has been an increased interest in data-driven modeling techniques, in particular neural networks have proven to provide an effective framework for solving a wide range of tasks. This paper provides a survey of the different ways to construct models of dynamical systems using neural networks. In addition to the basic overview, we review the related literature and outline the most significant challenges from numerical simulations that this modeling paradigm must overcome. Based on the reviewed literature and identified challenges, we provide a discussion on promising research areas.
Robotic design choice overview using co-simulation
Feb 17, 2018



Rapid robotic system development sets a demand for multi-disciplinary methods and tools to explore and compare design alternatives. In this paper, we present collaborative modeling that combines discrete-event models of controller software with continuous-time models of physical robot components. The presented co-modeling method utilized VDM for discrete-event and 20-sim for continuous-time modeling. The collaborative modeling method is illustrated with a concrete example of collaborative model development of a mobile robot animal feeding system. Simulations are used to evaluate the robot model output response in relation to operational demands. The result of the simulations provides the developers with an overview of the impacts of each solution instance in the chosen design space. Based on the solution overview the developers can select candidates that are deemed viable to be deployed and tested on an actual physical robot.