 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEngineering Reliable Autonomous Systems: Challenges and Solutions
Jun 24, 2026Engineering reliable autonomous systems is an important and growing topic in computer science. As autonomous systems become more prevalent, easy-to-use techniques for building them reliably are increasingly important. This workshop report captures and expands on the discussions at the Lorentz Center Workshop "Engineering Reliable Autonomous Systems" (ERAS), held from 10 to 14 June 2024. The workshop was co-organised by the organisers of the Workshop on Formal Methods for Autonomous Systems (FMAS) and the Workshop on Agents and Robots for reliable Engineered Autonomy (AREA). It brought together members of the FMAS and AREA communities, industry practitioners, and representatives from sectors where autonomous systems pose distinctive engineering challenges. The workshop focused on three main research topics: techniques for verification and validation of autonomous systems; engineering real-world autonomous systems; and software architectures for safe autonomous systems. Its main outcome is a catalogue of challenges in these areas and, most importantly, a pathway to solutions. Some challenges can already be tackled by techniques that are well known in academia but have not yet become regularly used in practice. Other challenges remain unresolved and require further research. This roadmap is intended to support future research and industrial collaboration.
Formal Evidence Generation for Assurance Cases for Robotic Software Models
Feb 03, 2026Robotics and Autonomous Systems are increasingly deployed in safety-critical domains, so that demonstrating their safety is essential. Assurance Cases (ACs) provide structured arguments supported by evidence, but generating and maintaining this evidence is labour-intensive, error-prone, and difficult to keep consistent as systems evolve. We present a model-based approach to systematically generating AC evidence by embedding formal verification into the assurance workflow. The approach addresses three challenges: systematically deriving formal assertions from natural language requirements using templates, orchestrating multiple formal verification tools to handle diverse property types, and integrating formal evidence production into the workflow. Leveraging RoboChart, a domain-specific modelling language with formal semantics, we combine model checking and theorem proving in our approach. Structured requirements are automatically transformed into formal assertions using predefined templates, and verification results are automatically integrated as evidence. Case studies demonstrate the effectiveness of our approach.
Probabilistic modelling and safety assurance of an agriculture robot providing light-treatment
Jun 24, 2025



Continued adoption of agricultural robots postulates the farmer's trust in the reliability, robustness and safety of the new technology. This motivates our work on safety assurance of agricultural robots, particularly their ability to detect, track and avoid obstacles and humans. This paper considers a probabilistic modelling and risk analysis framework for use in the early development phases. Starting off with hazard identification and a risk assessment matrix, the behaviour of the mobile robot platform, sensor and perception system, and any humans present are captured using three state machines. An auto-generated probabilistic model is then solved and analysed using the probabilistic model checker PRISM. The result provides unique insight into fundamental development and engineering aspects by quantifying the effect of the risk mitigation actions and risk reduction associated with distinct design concepts. These include implications of adopting a higher performance and more expensive Object Detection System or opting for a more elaborate warning system to increase human awareness. Although this paper mainly focuses on the initial concept-development phase, the proposed safety assurance framework can also be used during implementation, and subsequent deployment and operation phases.
Software Engineering for Self-Adaptive Robotics: A Research Agenda
May 26, 2025Self-adaptive robotic systems are designed to operate autonomously in dynamic and uncertain environments, requiring robust mechanisms to monitor, analyse, and adapt their behaviour in real-time. Unlike traditional robotic software, which follows predefined logic, self-adaptive robots leverage artificial intelligence, machine learning, and model-driven engineering to continuously adjust to changing operational conditions while ensuring reliability, safety, and performance. This paper presents a research agenda for software engineering in self-adaptive robotics, addressing critical challenges across two key dimensions: (1) the development phase, including requirements engineering, software design, co-simulation, and testing methodologies tailored to adaptive robotic systems, and (2) key enabling technologies, such as digital twins, model-driven engineering, and AI-driven adaptation, which facilitate runtime monitoring, fault detection, and automated decision-making. We discuss open research challenges, including verifying adaptive behaviours under uncertainty, balancing trade-offs between adaptability, performance, and safety, and integrating self-adaptation frameworks like MAPE-K. By providing a structured roadmap, this work aims to advance the software engineering foundations for self-adaptive robotic systems, ensuring they remain trustworthy, efficient, and capable of handling real-world complexities.
Model Checking and Verification of Synchronisation Properties of Cobot Welding
Nov 21, 2024



This paper describes use of model checking to verify synchronisation properties of an industrial welding system consisting of a cobot arm and an external turntable. The robots must move synchronously, but sometimes get out of synchronisation, giving rise to unsatisfactory weld qualities in problem areas, such as around corners. These mistakes are costly, since time is lost both in the robotic welding and in manual repairs needed to improve the weld. Verification of the synchronisation properties has shown that they are fulfilled as long as assumptions of correctness made about parts outside the scope of the model hold, indicating limitations in the hardware. These results have indicated the source of the problem, and motivated a re-calibration of the real-life system. This has drastically improved the welding results, and is a demonstration of how formal methods can be useful in an industrial setting.
* In Proceedings FMAS2024, arXiv:2411.13215
From Formalised State Machines to Implementations of Robotic Controllers
Feb 06, 2017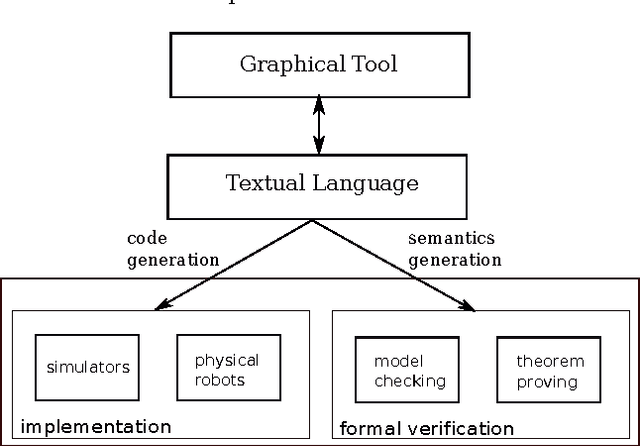
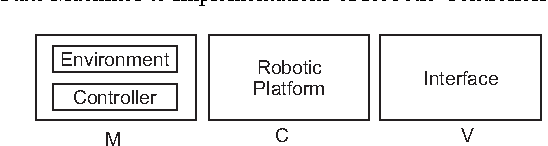

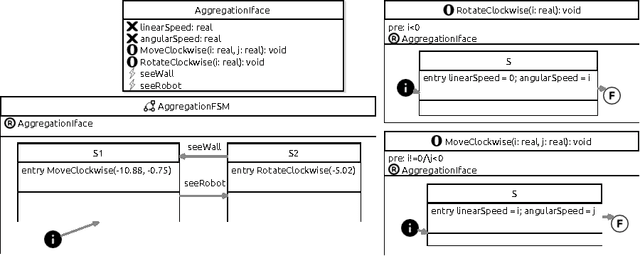
Controllers for autonomous robotic systems can be specified using state machines. However, these are typically developed in an ad hoc manner without formal semantics, which makes it difficult to analyse the controller. Simulations are often used during the development, but a rigorous connection between the designed controller and the implementation is often overlooked. This paper presents a state-machine based notation, RoboChart, together with a tool to automatically create code from the state machines, establishing a rigorous connection between specification and implementation. In RoboChart, a robot's controller is specified either graphically or using a textual description language. The controller code for simulation is automatically generated through a direct mapping from the specification. We demonstrate our approach using two case studies (self-organized aggregation and swarm taxis) in swarm robotics. The simulations are presented using two different simulators showing the general applicability of our approach.