 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding safe 3D robot grasps through efficient haptic exploration with unscented Bayesian optimization and collision penalty
Feb 10, 2024Robust grasping is a major, and still unsolved, problem in robotics. Information about the 3D shape of an object can be obtained either from prior knowledge (e.g., accurate models of known objects or approximate models of familiar objects) or real-time sensing (e.g., partial point clouds of unknown objects) and can be used to identify good potential grasps. However, due to modeling and sensing inaccuracies, local exploration is often needed to refine such grasps and successfully apply them in the real world. The recently proposed unscented Bayesian optimization technique can make such exploration safer by selecting grasps that are robust to uncertainty in the input space (e.g., inaccuracies in the grasp execution). Extending our previous work on 2D optimization, in this paper we propose a 3D haptic exploration strategy that combines unscented Bayesian optimization with a novel collision penalty heuristic to find safe grasps in a very efficient way: while by augmenting the search-space to 3D we are able to find better grasps, the collision penalty heuristic allows us to do so without increasing the number of exploration steps.
* 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Where is my hand? Deep hand segmentation for visual self-recognition in humanoid robots
Feb 09, 2021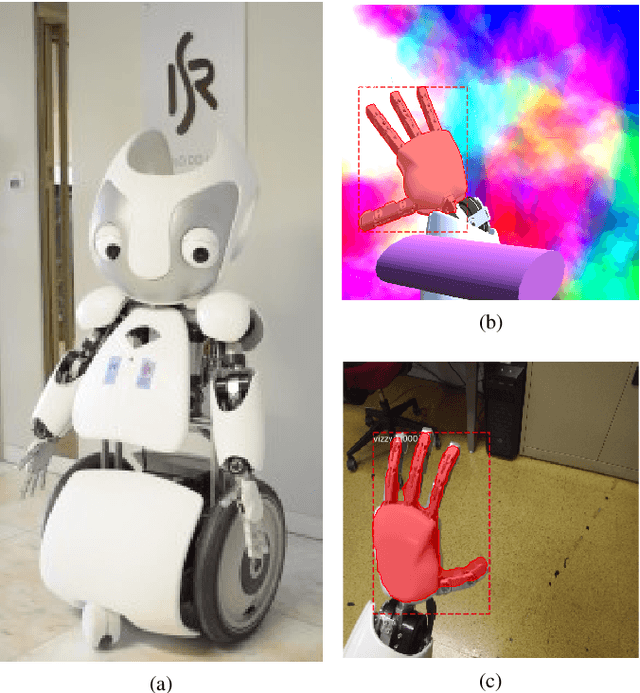
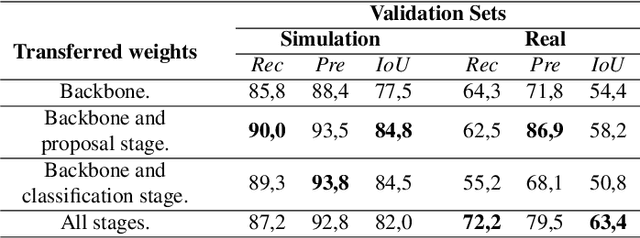
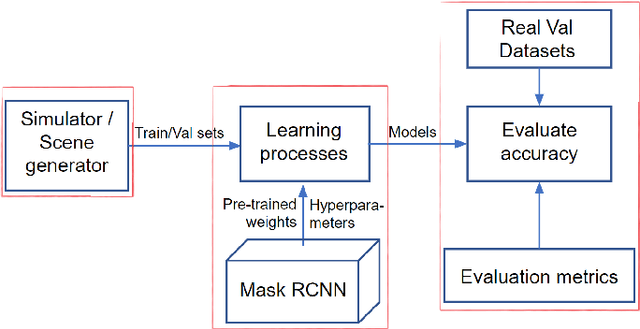
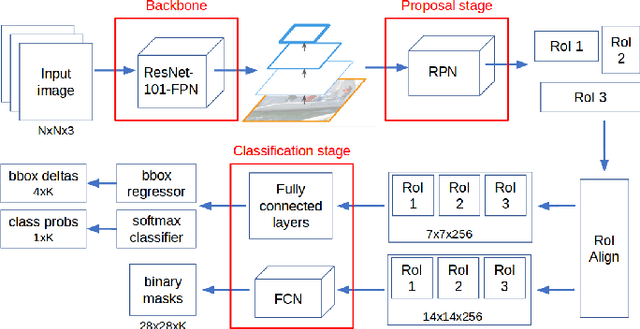
The ability to distinguish between the self and the background is of paramount importance for robotic tasks. The particular case of hands, as the end effectors of a robotic system that more often enter into contact with other elements of the environment, must be perceived and tracked with precision to execute the intended tasks with dexterity and without colliding with obstacles. They are fundamental for several applications, from Human-Robot Interaction tasks to object manipulation. Modern humanoid robots are characterized by high number of degrees of freedom which makes their forward kinematics models very sensitive to uncertainty. Thus, resorting to vision sensing can be the only solution to endow these robots with a good perception of the self, being able to localize their body parts with precision. In this paper, we propose the use of a Convolution Neural Network (CNN) to segment the robot hand from an image in an egocentric view. It is known that CNNs require a huge amount of data to be trained. To overcome the challenge of labeling real-world images, we propose the use of simulated datasets exploiting domain randomization techniques. We fine-tuned the Mask-RCNN network for the specific task of segmenting the hand of the humanoid robot Vizzy. We focus our attention on developing a methodology that requires low amounts of data to achieve reasonable performance while giving detailed insight on how to properly generate variability in the training dataset. Moreover, we analyze the fine-tuning process within the complex model of Mask-RCNN, understanding which weights should be transferred to the new task of segmenting robot hands. Our final model was trained solely on synthetic images and achieves an average IoU of 82% on synthetic validation data and 56.3% on real test data. These results were achieved with only 1000 training images and 3 hours of training time using a single GPU.
Online Body Schema Adaptation through Cost-Sensitive Active Learning
Jan 26, 2021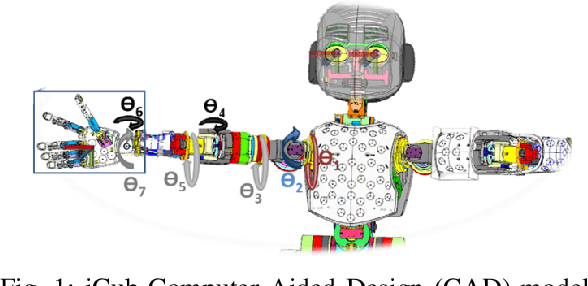
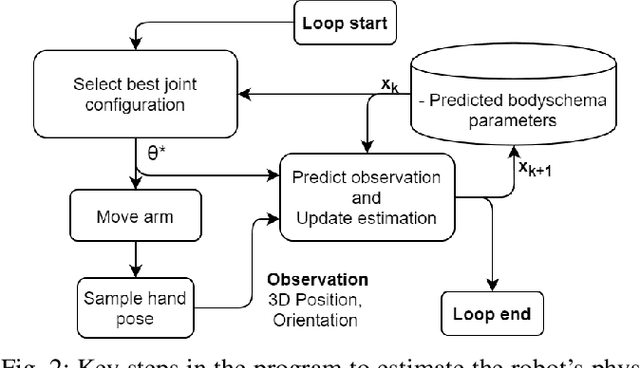
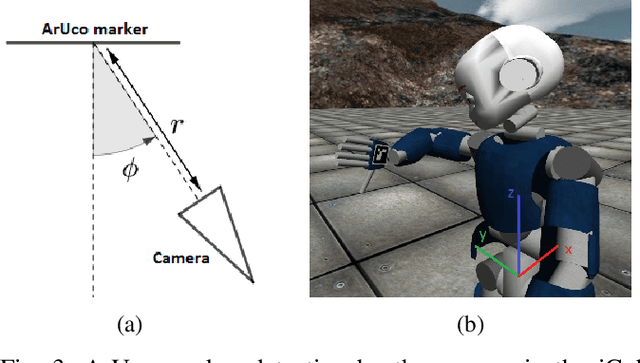
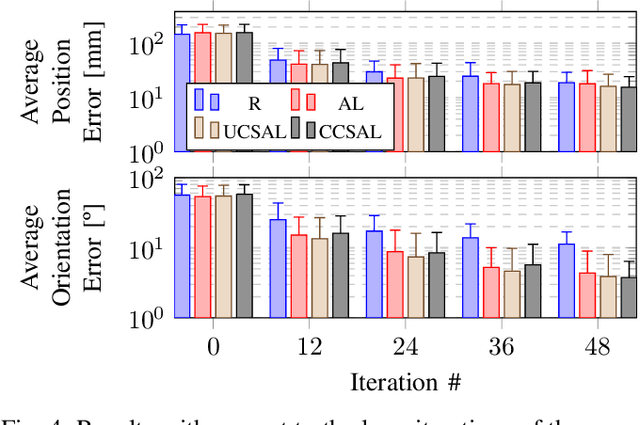
Humanoid robots have complex bodies and kinematic chains with several Degrees-of-Freedom (DoF) which are difficult to model. Learning the parameters of a kinematic model can be achieved by observing the position of the robot links during prospective motions and minimising the prediction errors. This work proposes a movement efficient approach for estimating online the body-schema of a humanoid robot arm in the form of Denavit-Hartenberg (DH) parameters. A cost-sensitive active learning approach based on the A-Optimality criterion is used to select optimal joint configurations. The chosen joint configurations simultaneously minimise the error in the estimation of the body schema and minimise the movement between samples. This reduces energy consumption, along with mechanical fatigue and wear, while not compromising the learning accuracy. The work was implemented in a simulation environment, using the 7DoF arm of the iCub robot simulator. The hand pose is measured with a single camera via markers placed in the palm and back of the robot's hand. A non-parametric occlusion model is proposed to avoid choosing joint configurations where the markers are not visible, thus preventing worthless attempts. The results show cost-sensitive active learning has similar accuracy to the standard active learning approach, while reducing in about half the executed movement.
Cleaning tasks knowledge transfer between heterogeneous robots: a deep learning approach
Mar 13, 2019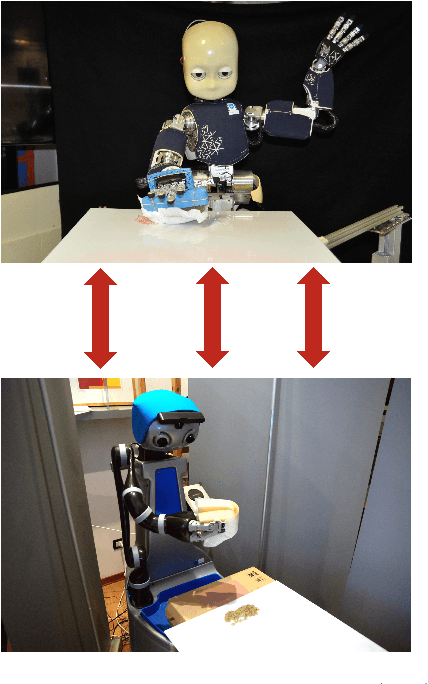

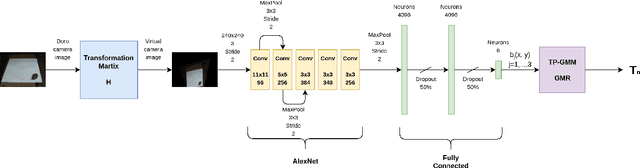
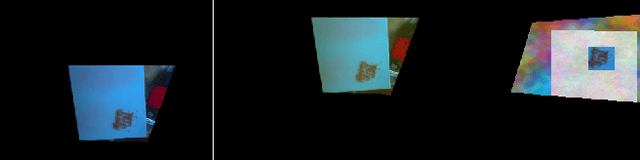
Nowadays, autonomous service robots are becoming an important topic in robotic research. Differently from typical industrial scenarios, with highly controlled environments, service robots must show an additional robustness to task perturbations and changes in the characteristics of their sensory feedback. In this paper a robot is taught to perform two different cleaning tasks over a table, using a learning from demonstration paradigm. However, differently from other approaches, a convolutional neural network is used to generalize the demonstrations to different, not yet seen dirt or stain patterns on the same table using only visual feedback, and to perform cleaning movements accordingly. Robustness to robot posture and illumination changes is achieved using data augmentation techniques and camera images transformation. This robustness allows the transfer of knowledge regarding execution of cleaning tasks between heterogeneous robots operating in different environmental settings. To demonstrate the viability of the proposed approach, a network trained in Lisbon to perform cleaning tasks, using the iCub robot, is successfully employed by the DoRo robot in Peccioli, Italy.
Learning at the Ends: From Hand to Tool Affordances in Humanoid Robots
Apr 09, 2018
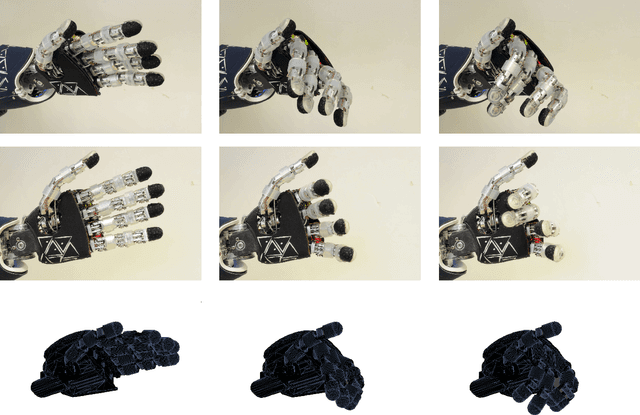
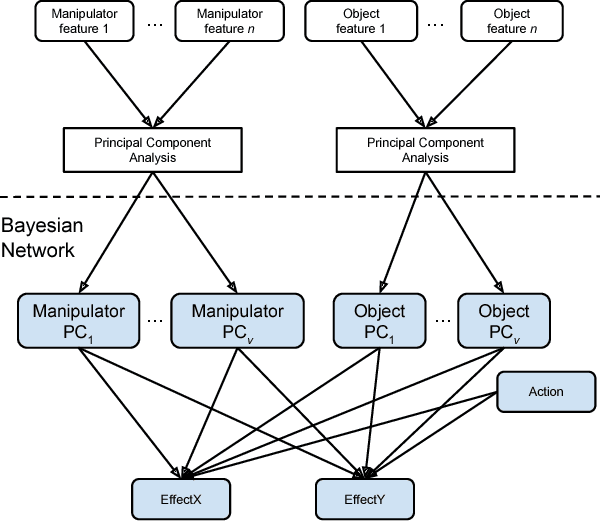
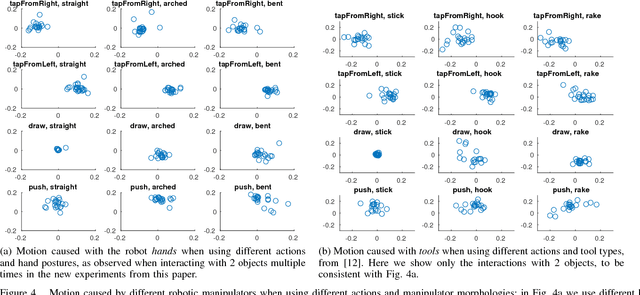
One of the open challenges in designing robots that operate successfully in the unpredictable human environment is how to make them able to predict what actions they can perform on objects, and what their effects will be, i.e., the ability to perceive object affordances. Since modeling all the possible world interactions is unfeasible, learning from experience is required, posing the challenge of collecting a large amount of experiences (i.e., training data). Typically, a manipulative robot operates on external objects by using its own hands (or similar end-effectors), but in some cases the use of tools may be desirable, nevertheless, it is reasonable to assume that while a robot can collect many sensorimotor experiences using its own hands, this cannot happen for all possible human-made tools. Therefore, in this paper we investigate the developmental transition from hand to tool affordances: what sensorimotor skills that a robot has acquired with its bare hands can be employed for tool use? By employing a visual and motor imagination mechanism to represent different hand postures compactly, we propose a probabilistic model to learn hand affordances, and we show how this model can generalize to estimate the affordances of previously unseen tools, ultimately supporting planning, decision-making and tool selection tasks in humanoid robots. We present experimental results with the iCub humanoid robot, and we publicly release the collected sensorimotor data in the form of a hand posture affordances dataset.