 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoupled Particle Filters for Robust Affordance Estimation
Mar 16, 2026Robotic affordance estimation is challenging due to visual, geometric, and semantic ambiguities in sensory input. We propose a method that disambiguates these signals using two coupled recursive estimators for sub-aspects of affordances: graspable and movable regions. Each estimator encodes property-specific regularities to reduce uncertainty, while their coupling enables bidirectional information exchange that focuses attention on regions where both agree, i.e., affordances. Evaluated on a real-world dataset, our method outperforms three recent affordance estimators (Where2Act, Hands-as-Probes, and HRP) by 308%, 245%, and 257% in precision, and remains robust under challenging conditions such as low light or cluttered environments. Furthermore, our method achieves a 70% success rate in our real-world evaluation. These results demonstrate that coupling complementary estimators yields precise, robust, and embodiment-appropriate affordance predictions.
Target Chase, Wall Building, and Fire Fighting: Autonomous UAVs of Team NimbRo at MBZIRC 2020
Jan 11, 2022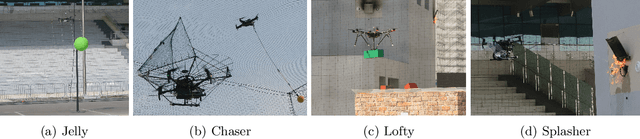
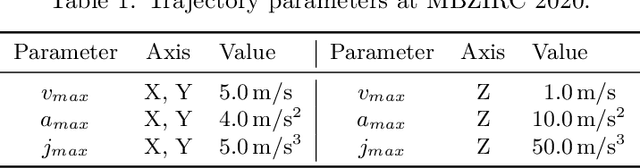
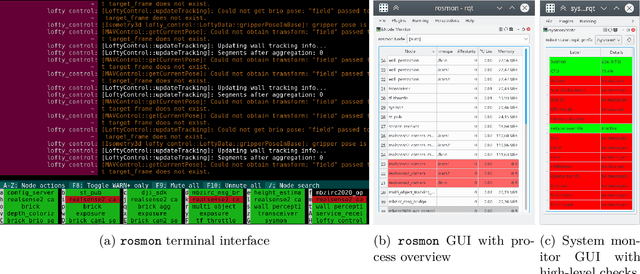

The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020 posed diverse challenges for unmanned aerial vehicles (UAVs). We present our four tailored UAVs, specifically developed for individual aerial-robot tasks of MBZIRC, including custom hardware- and software components. In Challenge 1, a target UAV is pursued using a high-efficiency, onboard object detection pipeline to capture a ball from the target UAV. A second UAV uses a similar detection method to find and pop balloons scattered throughout the arena. For Challenge 2, we demonstrate a larger UAV capable of autonomous aerial manipulation: Bricks are found and tracked from camera images. Subsequently, they are approached, picked, transported, and placed on a wall. Finally, in Challenge 3, our UAV autonomously finds fires using LiDAR and thermal cameras. It extinguishes the fires with an onboard fire extinguisher. While every robot features task-specific subsystems, all UAVs rely on a standard software stack developed for this particular and future competitions. We present our mostly open-source software solutions, including tools for system configuration, monitoring, robust wireless communication, high-level control, and agile trajectory generation. For solving the MBZIRC 2020 tasks, we advanced the state of the art in multiple research areas like machine vision and trajectory generation. We present our scientific contributions that constitute the foundation for our algorithms and systems and analyze the results from the MBZIRC competition 2020 in Abu Dhabi, where our systems reached second place in the Grand Challenge. Furthermore, we discuss lessons learned from our participation in this complex robotic challenge.