 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic AI for Robot Control: Flexible but still Fragile
Feb 13, 2026Recent work leverages the capabilities and commonsense priors of generative models for robot control. In this paper, we present an agentic control system in which a reasoning-capable language model plans and executes tasks by selecting and invoking robot skills within an iterative planner and executor loop. We deploy the system on two physical robot platforms in two settings: (i) tabletop grasping, placement, and box insertion in indoor mobile manipulation (Mobipick) and (ii) autonomous agricultural navigation and sensing (Valdemar). Both settings involve uncertainty, partial observability, sensor noise, and ambiguous natural-language commands. The system exposes structured introspection of its planning and decision process, reacts to exogenous events via explicit event checks, and supports operator interventions that modify or redirect ongoing execution. Across both platforms, our proof-of-concept experiments reveal substantial fragility, including non-deterministic suboptimal behavior, instruction-following errors, and high sensitivity to prompt specification. At the same time, the architecture is flexible: transfer to a different robot and task domain largely required updating the system prompt (domain model, affordances, and action catalogue) and re-binding the same tool interface to the platform-specific skill API.
A Scene Graph Backed Approach to Open Set Semantic Mapping
Feb 03, 2026While Open Set Semantic Mapping and 3D Semantic Scene Graphs (3DSSGs) are established paradigms in robotic perception, deploying them effectively to support high-level reasoning in large-scale, real-world environments remains a significant challenge. Most existing approaches decouple perception from representation, treating the scene graph as a derivative layer generated post hoc. This limits both consistency and scalability. In contrast, we propose a mapping architecture where the 3DSSG serves as the foundational backend, acting as the primary knowledge representation for the entire mapping process. Our approach leverages prior work on incremental scene graph prediction to infer and update the graph structure in real-time as the environment is explored. This ensures that the map remains topologically consistent and computationally efficient, even during extended operations in large-scale settings. By maintaining an explicit, spatially grounded representation that supports both flat and hierarchical topologies, we bridge the gap between sub-symbolic raw sensor data and high-level symbolic reasoning. Consequently, this provides a stable, verifiable structure that knowledge-driven frameworks, ranging from knowledge graphs and ontologies to Large Language Models (LLMs), can directly exploit, enabling agents to operate with enhanced interpretability, trustworthiness, and alignment to human concepts.
ExPrIS: Knowledge-Level Expectations as Priors for Object Interpretation from Sensor Data
Jan 21, 2026While deep learning has significantly advanced robotic object recognition, purely data-driven approaches often lack semantic consistency and fail to leverage valuable, pre-existing knowledge about the environment. This report presents the ExPrIS project, which addresses this challenge by investigating how knowledge-level expectations can serve as to improve object interpretation from sensor data. Our approach is based on the incremental construction of a 3D Semantic Scene Graph (3DSSG). We integrate expectations from two sources: contextual priors from past observations and semantic knowledge from external graphs like ConceptNet. These are embedded into a heterogeneous Graph Neural Network (GNN) to create an expectation-biased inference process. This method moves beyond static, frame-by-frame analysis to enhance the robustness and consistency of scene understanding over time. The report details this architecture, its evaluation, and outlines its planned integration on a mobile robotic platform.
* This preprint has not undergone peer review or any post-submission improvements or corrections. The Version of Record of this article is published in KI - Künstliche Intelligenz, and is available online at https://doi.org/10.1007/s13218-026-00901-7
Uncertainty-Resilient Active Intention Recognition for Robotic Assistants
Aug 26, 2025



Purposeful behavior in robotic assistants requires the integration of multiple components and technological advances. Often, the problem is reduced to recognizing explicit prompts, which limits autonomy, or is oversimplified through assumptions such as near-perfect information. We argue that a critical gap remains unaddressed -- specifically, the challenge of reasoning about the uncertain outcomes and perception errors inherent to human intention recognition. In response, we present a framework designed to be resilient to uncertainty and sensor noise, integrating real-time sensor data with a combination of planners. Centered around an intention-recognition POMDP, our approach addresses cooperative planning and acting under uncertainty. Our integrated framework has been successfully tested on a physical robot with promising results.
Acting and Planning with Hierarchical Operational Models on a Mobile Robot: A Study with RAE+UPOM
Jul 15, 2025



Robotic task execution faces challenges due to the inconsistency between symbolic planner models and the rich control structures actually running on the robot. In this paper, we present the first physical deployment of an integrated actor-planner system that shares hierarchical operational models for both acting and planning, interleaving the Reactive Acting Engine (RAE) with an anytime UCT-like Monte Carlo planner (UPOM). We implement RAE+UPOM on a mobile manipulator in a real-world deployment for an object collection task. Our experiments demonstrate robust task execution under action failures and sensor noise, and provide empirical insights into the interleaved acting-and-planning decision making process.
Online Knowledge Integration for 3D Semantic Mapping: A Survey
Nov 27, 2024



Semantic mapping is a key component of robots operating in and interacting with objects in structured environments. Traditionally, geometric and knowledge representations within a semantic map have only been loosely integrated. However, recent advances in deep learning now allow full integration of prior knowledge, represented as knowledge graphs or language concepts, into sensor data processing and semantic mapping pipelines. Semantic scene graphs and language models enable modern semantic mapping approaches to incorporate graph-based prior knowledge or to leverage the rich information in human language both during and after the mapping process. This has sparked substantial advances in semantic mapping, leading to previously impossible novel applications. This survey reviews these recent developments comprehensively, with a focus on online integration of knowledge into semantic mapping. We specifically focus on methods using semantic scene graphs for integrating symbolic prior knowledge and language models for respective capture of implicit common-sense knowledge and natural language concepts
A Development Cycle for Automated Self-Exploration of Robot Behaviors
Jul 29, 2020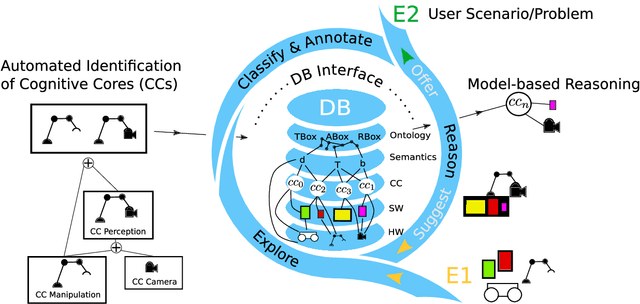
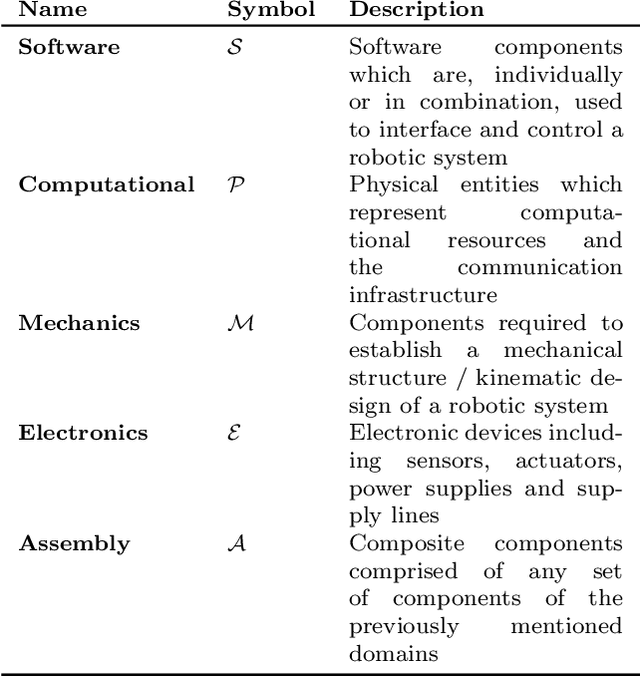


In this paper we introduce Q-Rock, a development cycle for the automated self-exploration and qualification of robotic behaviors. With Q-Rock, we suggest a novel, integrative approach to automate robot development processes. Q-Rock combines several machine learning and reasoning techniques to deal with the increasing complexity in the design of robotic systems. The Q-Rock development cycle consists of three complementary processes: (1) automated exploration of capabilities that a given robotic hardware provides, (2) classification and semantic annotation of these capabilities to generate more complex behaviors, and (3) mapping between application requirements and available behaviors. These processes are based on a graph-based representation of a robot's structure, including hardware and software components. A graph-database serves as central, scalable knowledge base to enable collaboration with robot designers including mechanical and electrical engineers, software developers and machine learning experts. In this paper we formalize Q-Rock's integrative development cycle and highlight its benefits with a proof-of-concept implementation and a use case demonstration.
Robust Plan Execution with Unexpected Observations
Mar 20, 2020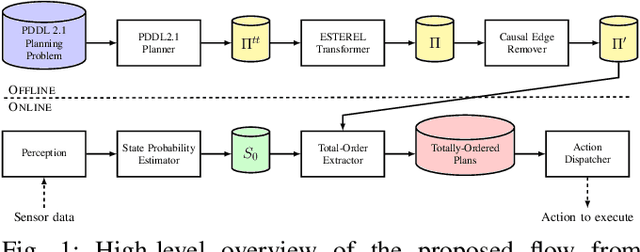
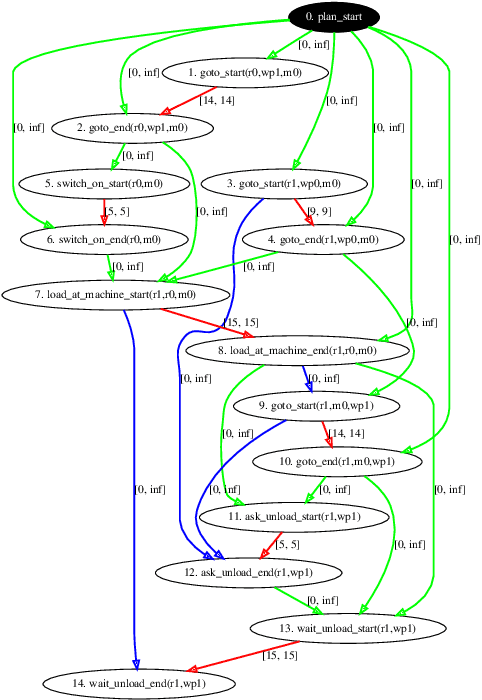
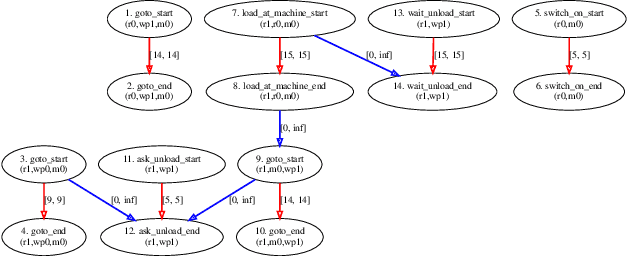
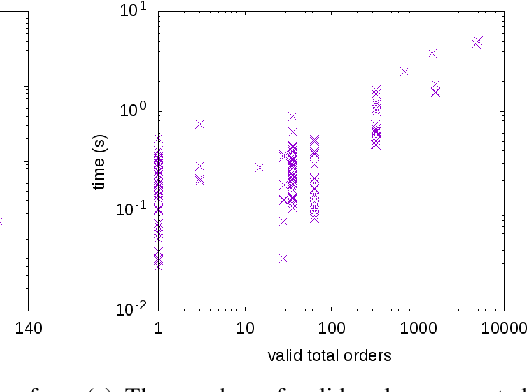
In order to ensure the robust actuation of a plan, execution must be adaptable to unexpected situations in the world and to exogenous events. This is critical in domains in which committing to a wrong ordering of actions can cause the plan failure, even when all the actions succeed. We propose an approach to the execution of a task plan that permits some adaptability to unexpected observations of the state while maintaining the validity of the plan through online reasoning. Our approach computes an adaptable, partially-ordered plan from a given totally-ordered plan. The partially-ordered plan is adaptable in that it can exploit beneficial differences between the world and what was expected. The approach is general in that it can be used with any task planner that produces either a totally or a partially-ordered plan. We propose a plan execution algorithm that computes online the complete set of valid totally-ordered plans described by an adaptable partially-ordered plan together with the probability of success for each of them. This set is then used to choose the next action to execute.