 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImprecise Bayesian Neural Networks
Feb 19, 2023



Uncertainty quantification and robustness to distribution shifts are important goals in machine learning and artificial intelligence. Although Bayesian neural networks (BNNs) allow for uncertainty in the predictions to be assessed, different sources of uncertainty are indistinguishable. We present imprecise Bayesian neural networks (IBNNs); they generalize and overcome some of the drawbacks of standard BNNs. These latter are trained using a single prior and likelihood distributions, whereas IBNNs are trained using credal prior and likelihood sets. They allow to distinguish between aleatoric and epistemic uncertainties, and to quantify them. In addition, IBNNs are robust in the sense of Bayesian sensitivity analysis, and are more robust than BNNs to distribution shift. They can also be used to compute sets of outcomes that enjoy PAC-like properties. We apply IBNNs to two case studies. One, to model blood glucose and insulin dynamics for artificial pancreas control, and two, for motion prediction in autonomous driving scenarios. We show that IBNNs performs better when compared to an ensemble of BNNs benchmark.
CODiT: Conformal Out-of-Distribution Detection in Time-Series Data
Jul 24, 2022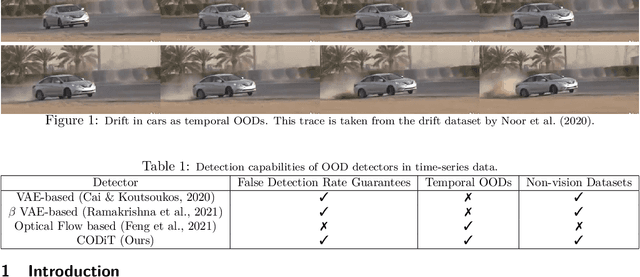
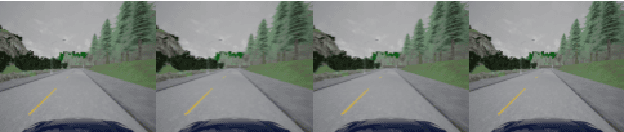
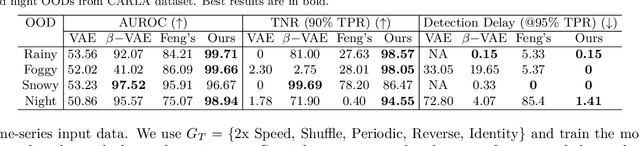
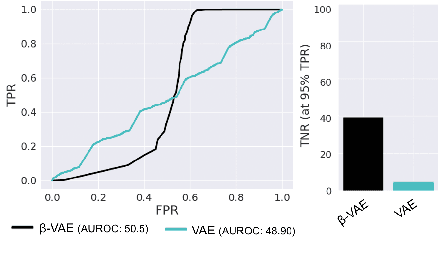
Machine learning models are prone to making incorrect predictions on inputs that are far from the training distribution. This hinders their deployment in safety-critical applications such as autonomous vehicles and healthcare. The detection of a shift from the training distribution of individual datapoints has gained attention. A number of techniques have been proposed for such out-of-distribution (OOD) detection. But in many applications, the inputs to a machine learning model form a temporal sequence. Existing techniques for OOD detection in time-series data either do not exploit temporal relationships in the sequence or do not provide any guarantees on detection. We propose using deviation from the in-distribution temporal equivariance as the non-conformity measure in conformal anomaly detection framework for OOD detection in time-series data.Computing independent predictions from multiple conformal detectors based on the proposed measure and combining these predictions by Fisher's method leads to the proposed detector CODiT with guarantees on false detection in time-series data. We illustrate the efficacy of CODiT by achieving state-of-the-art results on computer vision datasets in autonomous driving. We also show that CODiT can be used for OOD detection in non-vision datasets by performing experiments on the physiological GAIT sensory dataset. Code, data, and trained models are available at https://github.com/kaustubhsridhar/time-series-OOD.
Towards Alternative Techniques for Improving Adversarial Robustness: Analysis of Adversarial Training at a Spectrum of Perturbations
Jun 13, 2022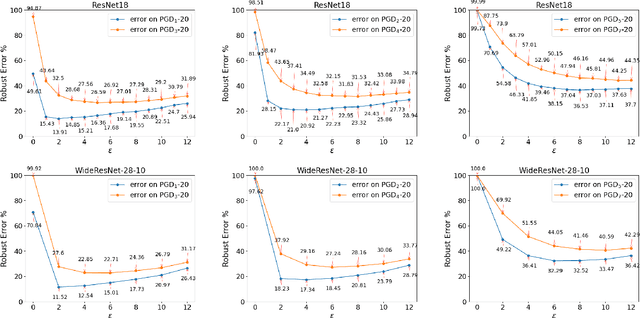
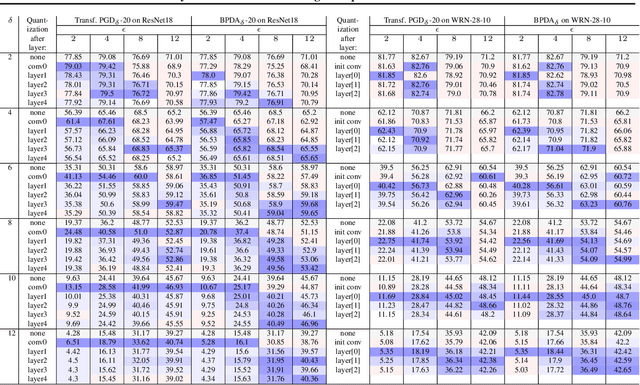
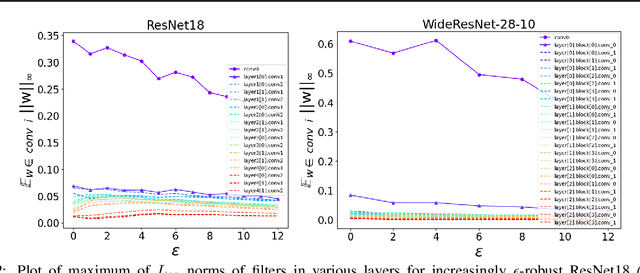
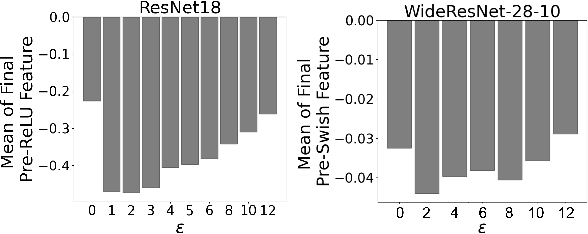
Adversarial training (AT) and its variants have spearheaded progress in improving neural network robustness to adversarial perturbations and common corruptions in the last few years. Algorithm design of AT and its variants are focused on training models at a specified perturbation strength $\epsilon$ and only using the feedback from the performance of that $\epsilon$-robust model to improve the algorithm. In this work, we focus on models, trained on a spectrum of $\epsilon$ values. We analyze three perspectives: model performance, intermediate feature precision and convolution filter sensitivity. In each, we identify alternative improvements to AT that otherwise wouldn't have been apparent at a single $\epsilon$. Specifically, we find that for a PGD attack at some strength $\delta$, there is an AT model at some slightly larger strength $\epsilon$, but no greater, that generalizes best to it. Hence, we propose overdesigning for robustness where we suggest training models at an $\epsilon$ just above $\delta$. Second, we observe (across various $\epsilon$ values) that robustness is highly sensitive to the precision of intermediate features and particularly those after the first and second layer. Thus, we propose adding a simple quantization to defenses that improves accuracy on seen and unseen adaptive attacks. Third, we analyze convolution filters of each layer of models at increasing $\epsilon$ and notice that those of the first and second layer may be solely responsible for amplifying input perturbations. We present our findings and demonstrate our techniques through experiments with ResNet and WideResNet models on the CIFAR-10 and CIFAR-10-C datasets.
PAC-Wrap: Semi-Supervised PAC Anomaly Detection
May 22, 2022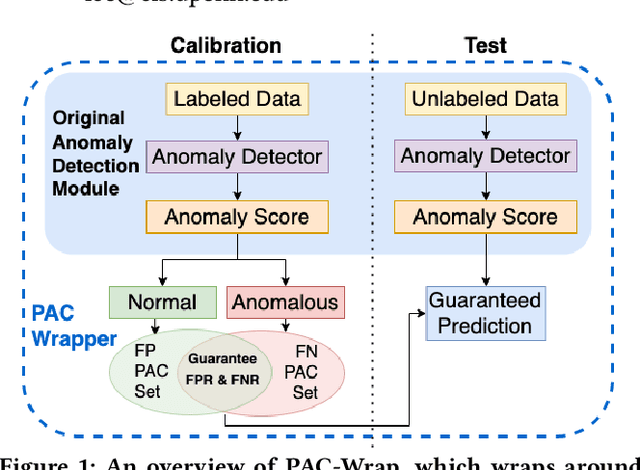
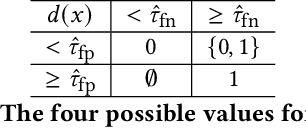
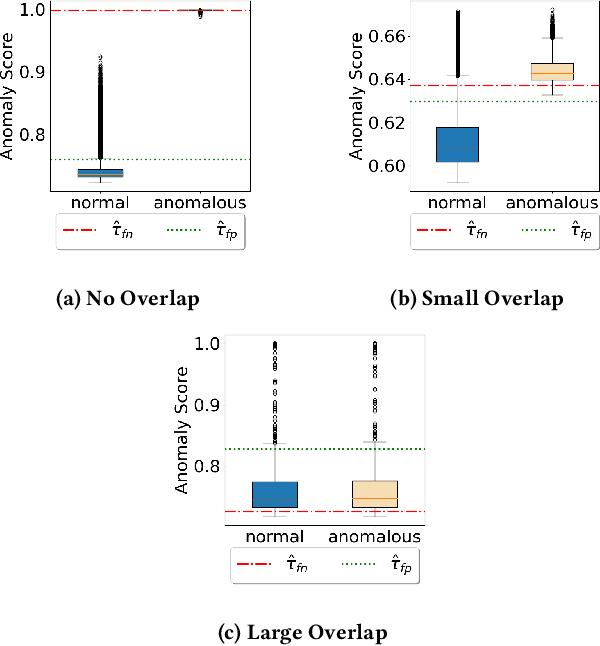
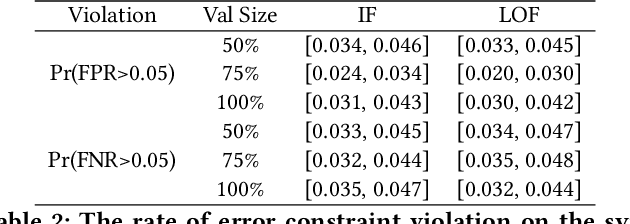
Anomaly detection is essential for preventing hazardous outcomes for safety-critical applications like autonomous driving. Given their safety-criticality, these applications benefit from provable bounds on various errors in anomaly detection. To achieve this goal in the semi-supervised setting, we propose to provide Probably Approximately Correct (PAC) guarantees on the false negative and false positive detection rates for anomaly detection algorithms. Our method (PAC-Wrap) can wrap around virtually any existing semi-supervised and unsupervised anomaly detection method, endowing it with rigorous guarantees. Our experiments with various anomaly detectors and datasets indicate that PAC-Wrap is broadly effective.
iDECODe: In-distribution Equivariance for Conformal Out-of-distribution Detection
Jan 07, 2022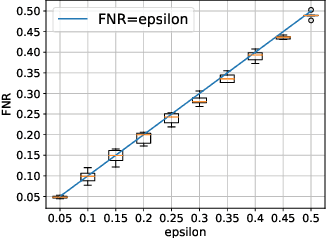

Machine learning methods such as deep neural networks (DNNs), despite their success across different domains, are known to often generate incorrect predictions with high confidence on inputs outside their training distribution. The deployment of DNNs in safety-critical domains requires detection of out-of-distribution (OOD) data so that DNNs can abstain from making predictions on those. A number of methods have been recently developed for OOD detection, but there is still room for improvement. We propose the new method iDECODe, leveraging in-distribution equivariance for conformal OOD detection. It relies on a novel base non-conformity measure and a new aggregation method, used in the inductive conformal anomaly detection framework, thereby guaranteeing a bounded false detection rate. We demonstrate the efficacy of iDECODe by experiments on image and audio datasets, obtaining state-of-the-art results. We also show that iDECODe can detect adversarial examples.
Confidence Composition for Monitors of Verification Assumptions
Nov 03, 2021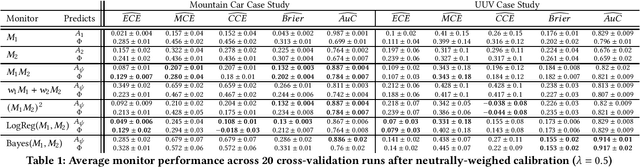
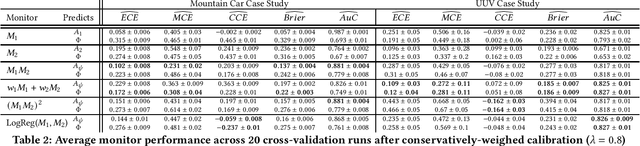
Closed-loop verification of cyber-physical systems with neural network controllers offers strong safety guarantees under certain assumptions. It is, however, difficult to determine whether these guarantees apply at run time because verification assumptions may be violated. To predict safety violations in a verified system, we propose a three-step framework for monitoring the confidence in verification assumptions. First, we represent the sufficient condition for verified safety with a propositional logical formula over assumptions. Second, we build calibrated confidence monitors that evaluate the probability that each assumption holds. Third, we obtain the confidence in the verification guarantees by composing the assumption monitors using a composition function suitable for the logical formula. Our framework provides theoretical bounds on the calibration and conservatism of compositional monitors. In two case studies, we demonstrate that the composed monitors improve over their constituents and successfully predict safety violations.
Detecting OODs as datapoints with High Uncertainty
Aug 13, 2021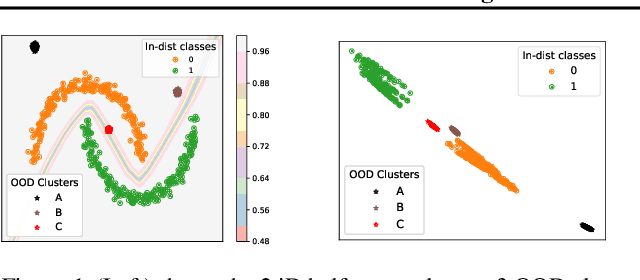
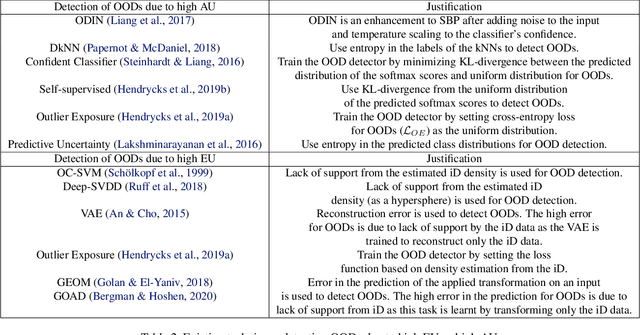
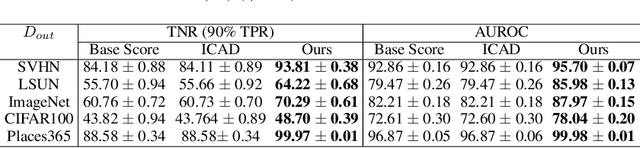
Deep neural networks (DNNs) are known to produce incorrect predictions with very high confidence on out-of-distribution inputs (OODs). This limitation is one of the key challenges in the adoption of DNNs in high-assurance systems such as autonomous driving, air traffic management, and medical diagnosis. This challenge has received significant attention recently, and several techniques have been developed to detect inputs where the model's prediction cannot be trusted. These techniques detect OODs as datapoints with either high epistemic uncertainty or high aleatoric uncertainty. We demonstrate the difference in the detection ability of these techniques and propose an ensemble approach for detection of OODs as datapoints with high uncertainty (epistemic or aleatoric). We perform experiments on vision datasets with multiple DNN architectures, achieving state-of-the-art results in most cases.
Robust Learning via Persistency of Excitation
Jun 11, 2021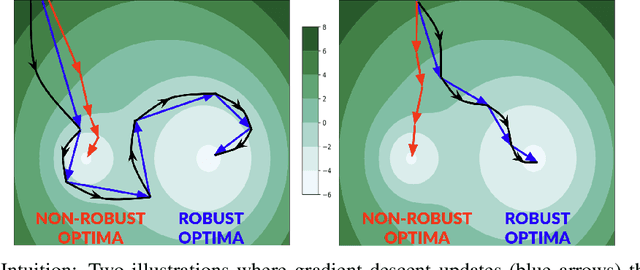
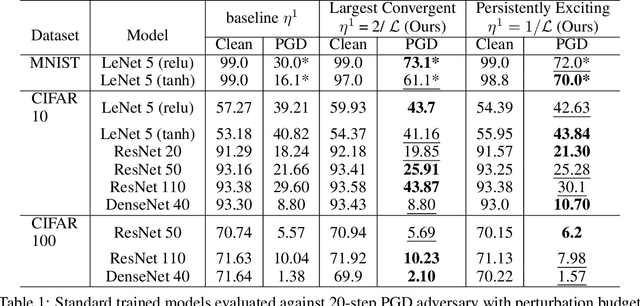
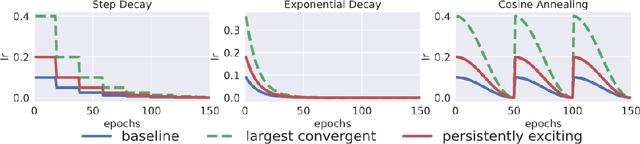
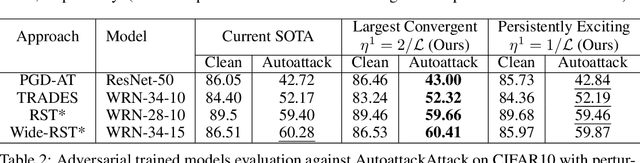
Improving adversarial robustness of neural networks remains a major challenge. Fundamentally, training a network is a parameter estimation problem. In adaptive control theory, maintaining persistency of excitation (PoE) is integral to ensuring convergence of parameter estimates in dynamical systems to their robust optima. In this work, we show that network training using gradient descent is equivalent to a dynamical system parameter estimation problem. Leveraging this relationship, we prove a sufficient condition for PoE of gradient descent is achieved when the learning rate is less than the inverse of the Lipschitz constant of the gradient of loss function. We provide an efficient technique for estimating the corresponding Lipschitz constant using extreme value theory and demonstrate that by only scaling the learning rate schedule we can increase adversarial accuracy by up to 15% points on benchmark datasets. Our approach also universally increases the adversarial accuracy by 0.1% to 0.3% points in various state-of-the-art adversarially trained models on the AutoAttack benchmark, where every small margin of improvement is significant.
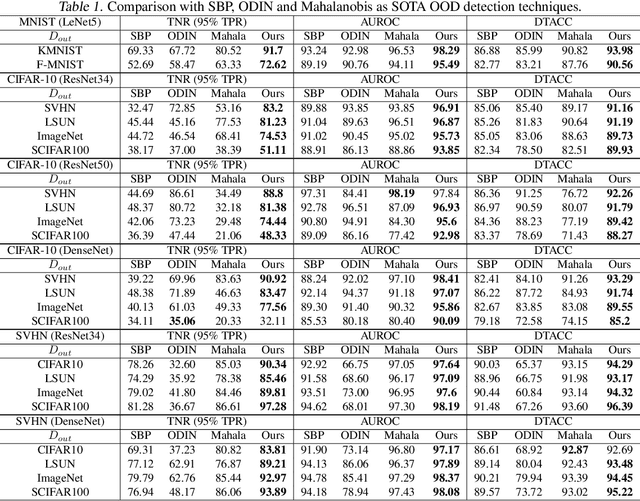
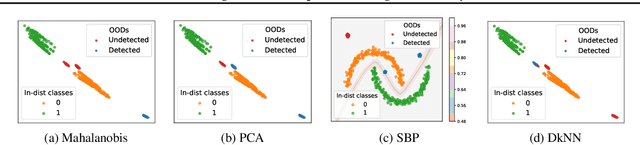
Are all outliers alike? On Understanding the Diversity of Outliers for Detecting OODs
Mar 23, 2021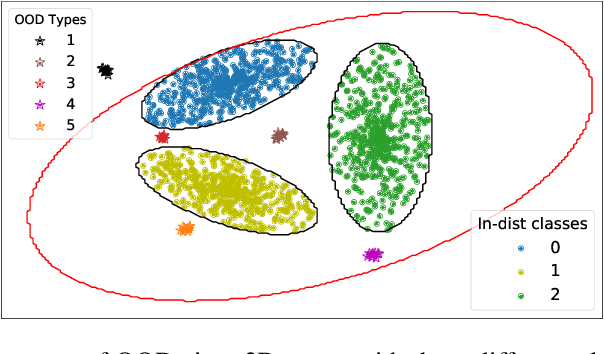
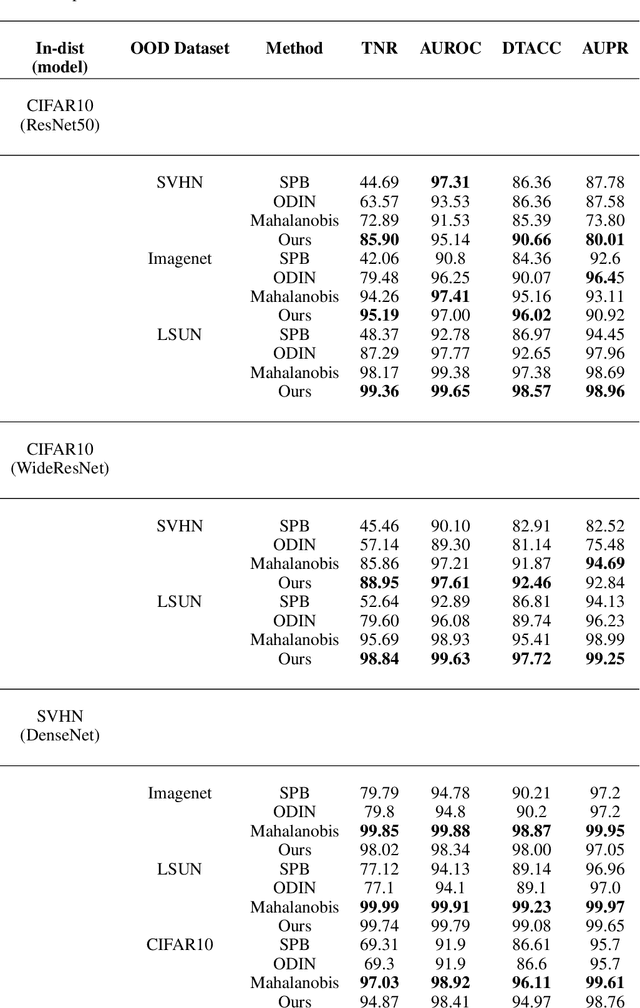
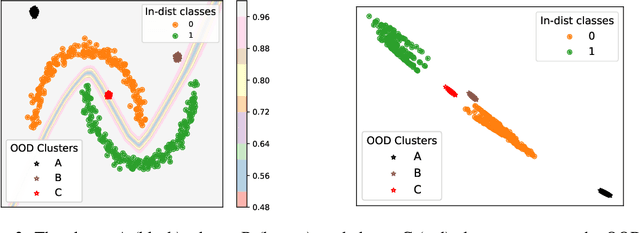
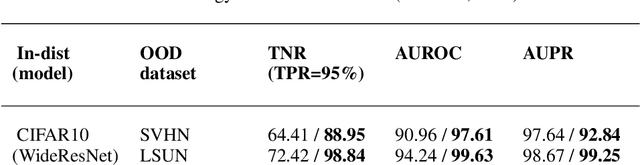
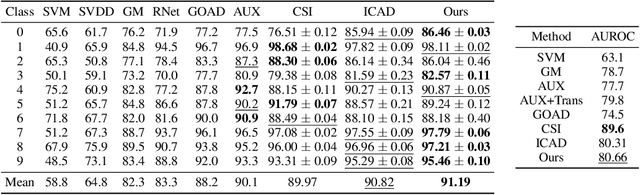
Deep neural networks (DNNs) are known to produce incorrect predictions with very high confidence on out-of-distribution (OOD) inputs. This limitation is one of the key challenges in the adoption of deep learning models in high-assurance systems such as autonomous driving, air traffic management, and medical diagnosis. This challenge has received significant attention recently, and several techniques have been developed to detect inputs where the model's prediction cannot be trusted. These techniques use different statistical, geometric, or topological signatures. This paper presents a taxonomy of OOD outlier inputs based on their source and nature of uncertainty. We demonstrate how different existing detection approaches fail to detect certain types of outliers. We utilize these insights to develop a novel integrated detection approach that uses multiple attributes corresponding to different types of outliers. Our results include experiments on CIFAR10, SVHN and MNIST as in-distribution data and Imagenet, LSUN, SVHN (for CIFAR10), CIFAR10 (for SVHN), KMNIST, and F-MNIST as OOD data across different DNN architectures such as ResNet34, WideResNet, DenseNet, and LeNet5.
Self-Driving Vehicle Verification Towards a Benchmark
Jun 20, 2018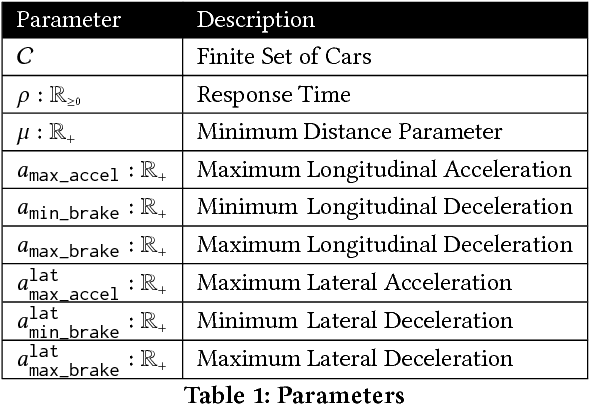
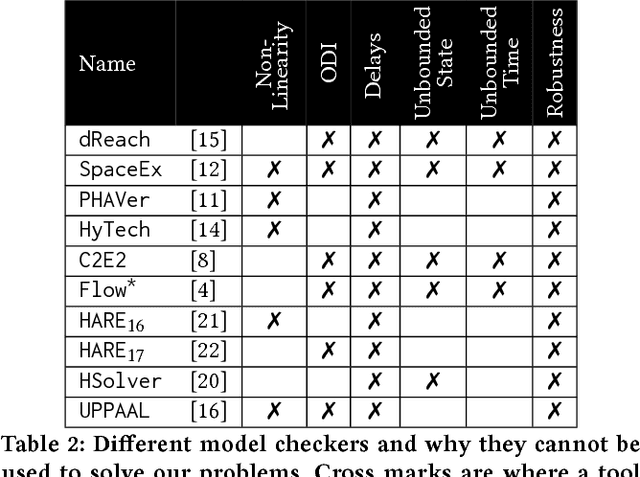
Industrial cyber-physical systems are hybrid systems with strict safety requirements. Despite not having a formal semantics, most of these systems are modeled using Stateflow/Simulink for mainly two reasons: (1) it is easier to model, test, and simulate using these tools, and (2) dynamics of these systems are not supported by most other tools. Furthermore, with the ever growing complexity of cyber-physical systems, grows the gap between what can be modeled using an automatic formal verification tool and models of industrial cyber-physical systems. In this paper, we present a simple formal model for self-deriving cars. While after some simplification, safety of this system has already been proven manually, to the best of our knowledge, no automatic formal verification tool supports its dynamics. We hope this serves as a challenge problem for formal verification tools targeting industrial applications.