 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOWP-IMU: An RSS-based Optical Wireless and IMU Indoor Positioning Dataset
May 22, 2025



Received signal strength (RSS)-based optical wireless positioning (OWP) systems are becoming popular for indoor localization because they are low-cost and accurate. However, few open-source datasets are available to test and analyze RSS-based OWP systems. In this paper, we collected RSS values at a sampling frequency of 27 Hz, inertial measurement unit (IMU) at a sampling frequency of 200 Hz and the ground truth at a sampling frequency of 160 Hz in two indoor environments. One environment has no obstacles, and the other has a metal column as an obstacle to represent a non-line-of-sight (NLOS) scenario. We recorded data with a vehicle at three different speeds (low, medium and high). The dataset includes over 110 k data points and covers more than 80 min. We also provide benchmark tests to show localization performance using only RSS-based OWP and improve accuracy by combining IMU data via extended kalman filter. The dataset OWP-IMU is open source1 to support further research on indoor localization methods.
Enhancing RSS-Based Visible Light Positioning by Optimal Calibrating the LED Tilt and Gain
Apr 29, 2024



This paper presents an optimal calibration scheme and a weighted least squares (LS) localization algorithm for received signal strength (RSS) based visible light positioning (VLP) systems, focusing on the often overlooked impact of light emitting diode (LED) tilt. By optimally calibrating LED tilt and gain, we significantly enhance VLP localization accuracy. Our algorithm outperforms both machine learning Gaussian processes (GPs) and traditional multilateration techniques. Against GPs, it achieves improvements of 58% and 74% in the 50th and 99th percentiles, respectively. When compared to multilateration, it reduces the 50th percentile error from 7.4 cm to 3.2 cm and the 99th percentile error from 25.7 cm to 11 cm. We introduce a low-complexity estimator for tilt and gain that meets the Cramer-Rao lower bound (CRLB) for the mean squared error (MSE), emphasizing its precision and efficiency. Further, we elaborate on optimal calibration measurement placement and refine the observation model to include residual calibration errors, thereby improving localization performance. The weighted LS algorithm's effectiveness is validated through simulations and real-world data, consistently outperforming GPs and multilateration, across various training set sizes and reducing outlier errors. Our findings underscore the critical role of LED tilt calibration in advancing VLP system accuracy and contribute to a more precise model for indoor positioning technologies.
Techtile -- Open 6G R&D Testbed for Communication, Positioning, Sensing, WPT and Federated Learning
Feb 09, 2022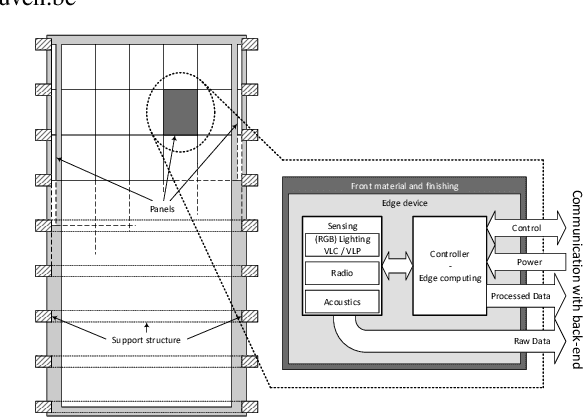
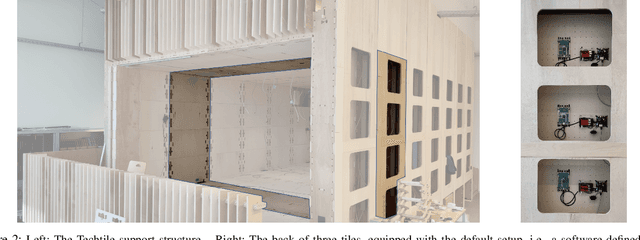
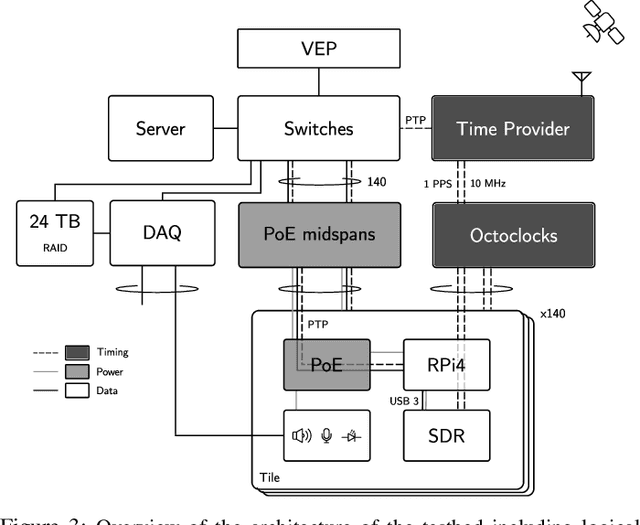
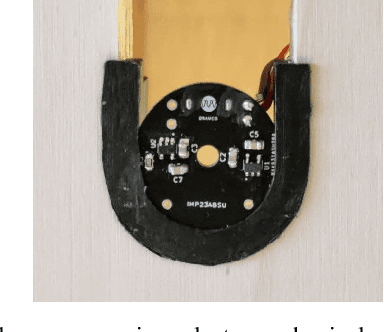
New concepts for next-generation wireless systems are being developed. It is expected that these 6G and beyond systems will incorporate more than only communication, but also sensing, positioning, (deep) edge computing, and other services. The discussed measurement facility and approach, named Techtile, is an open, both in design and operation, and unique testbed to evaluate these newly envisioned systems. Techtile is a multi-functional and versatile testbed, providing fine-grained distributed resources for new communication, positioning and sensing technologies. The facility enables experimental research on hyper-connected interactive environments and validation of new algorithms and topologies. The backbone connects 140~resource units equipped with edge computing devices, software-defined radios, sensors, and LED sources. By doing so, different network topologies and local-versus-central computing can be assessed. The introduced diversity of i) the technologies (e.g., RF, acoustics and light), ii) the distributed resources and iii) the interconnectivity allows exploring more degrees and new types of diversity, which can be investigated in this testbed.