 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Event-Based Vision for Obstacle Avoidance with a Quadrotor
Nov 05, 2024



We present the first static-obstacle avoidance method for quadrotors using just an onboard, monocular event camera. Quadrotors are capable of fast and agile flight in cluttered environments when piloted manually, but vision-based autonomous flight in unknown environments is difficult in part due to the sensor limitations of traditional onboard cameras. Event cameras, however, promise nearly zero motion blur and high dynamic range, but produce a very large volume of events under significant ego-motion and further lack a continuous-time sensor model in simulation, making direct sim-to-real transfer not possible. By leveraging depth prediction as a pretext task in our learning framework, we can pre-train a reactive obstacle avoidance events-to-control policy with approximated, simulated events and then fine-tune the perception component with limited events-and-depth real-world data to achieve obstacle avoidance in indoor and outdoor settings. We demonstrate this across two quadrotor-event camera platforms in multiple settings and find, contrary to traditional vision-based works, that low speeds (1m/s) make the task harder and more prone to collisions, while high speeds (5m/s) result in better event-based depth estimation and avoidance. We also find that success rates in outdoor scenes can be significantly higher than in certain indoor scenes.
* 18 pages with supplementary
Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic Systems
Sep 17, 2024

Tracking controllers enable robotic systems to accurately follow planned reference trajectories. In particular, reinforcement learning (RL) has shown promise in the synthesis of controllers for systems with complex dynamics and modest online compute budgets. However, the poor sample efficiency of RL and the challenges of reward design make training slow and sometimes unstable, especially for high-dimensional systems. In this work, we leverage the inherent Lie group symmetries of robotic systems with a floating base to mitigate these challenges when learning tracking controllers. We model a general tracking problem as a Markov decision process (MDP) that captures the evolution of both the physical and reference states. Next, we prove that symmetry in the underlying dynamics and running costs leads to an MDP homomorphism, a mapping that allows a policy trained on a lower-dimensional "quotient" MDP to be lifted to an optimal tracking controller for the original system. We compare this symmetry-informed approach to an unstructured baseline, using Proximal Policy Optimization (PPO) to learn tracking controllers for three systems: the Particle (a forced point mass), the Astrobee (a fullyactuated space robot), and the Quadrotor (an underactuated system). Results show that a symmetry-aware approach both accelerates training and reduces tracking error after the same number of training steps.
Vision Transformers for End-to-End Vision-Based Quadrotor Obstacle Avoidance
May 16, 2024



We demonstrate the capabilities of an attention-based end-to-end approach for high-speed quadrotor obstacle avoidance in dense, cluttered environments, with comparison to various state-of-the-art architectures. Quadrotor unmanned aerial vehicles (UAVs) have tremendous maneuverability when flown fast; however, as flight speed increases, traditional vision-based navigation via independent mapping, planning, and control modules breaks down due to increased sensor noise, compounding errors, and increased processing latency. Thus, learning-based, end-to-end planning and control networks have shown to be effective for online control of these fast robots through cluttered environments. We train and compare convolutional, U-Net, and recurrent architectures against vision transformer models for depth-based end-to-end control, in a photorealistic, high-physics-fidelity simulator as well as in hardware, and observe that the attention-based models are more effective as quadrotor speeds increase, while recurrent models with many layers provide smoother commands at lower speeds. To the best of our knowledge, this is the first work to utilize vision transformers for end-to-end vision-based quadrotor control.
Temporal Waypoint Navigation of Multi-UAV Payload System using Barrier Functions
Nov 25, 2022



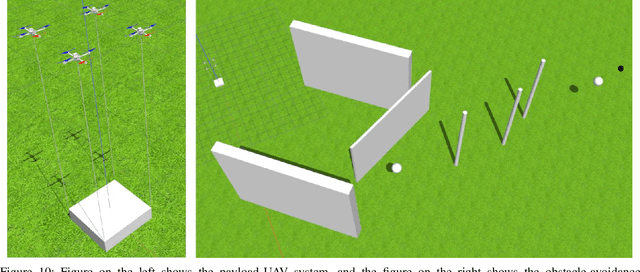
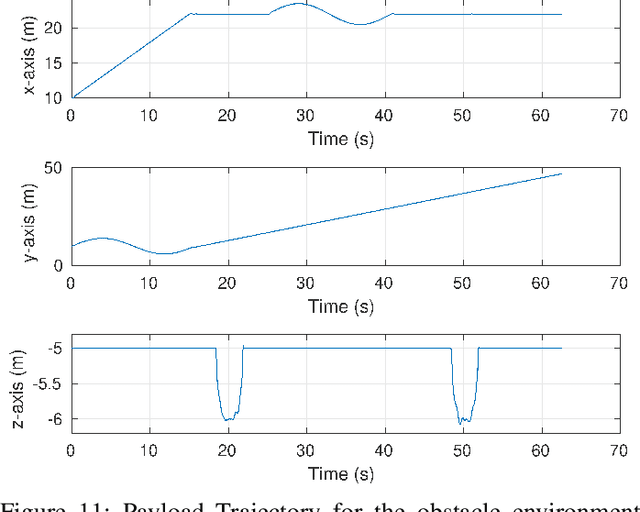
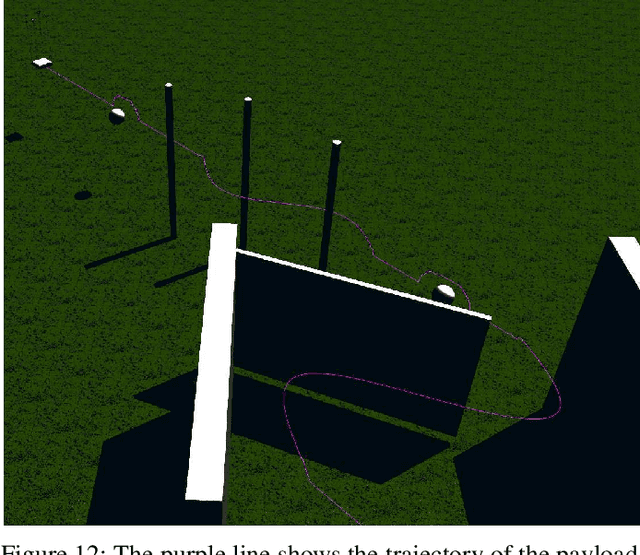
Aerial package transportation often requires complex spatial and temporal specifications to be satisfied in order to ensure safe and timely delivery from one point to another. It is usually efficient to transport versatile payloads using multiple UAVs that can work collaboratively to achieve the desired task. The complex temporal specifications can be handled coherently by applying Signal Temporal Logic (STL) to dynamical systems. This paper addresses the problem of waypoint navigation of a multi-UAV payload system under temporal specifications using higher-order time-varying control barrier functions (HOCBFs). The complex nonlinear system of relative degree two is transformed into a simple linear system using input-output feedback linearization. An optimization-based control law is then derived to achieve the temporal waypoint navigation of the payload. The controller's efficacy and real-time implementability are demonstrated by simulating a package delivery scenario inside a high-fidelity Gazebo simulation environment.
Computationally Light Spectrally Normalized Memory Neuron Network based Estimator for GPS-Denied operation of Micro UAV
Nov 12, 2022



This paper addresses the problem of position estimation in UAVs operating in a cluttered environment where GPS information is unavailable. A model learning-based approach is proposed that takes in the rotor RPMs and past state as input and predicts the one-step-ahead position of the UAV using a novel spectral-normalized memory neural network (SN-MNN). The spectral normalization guarantees stable and reliable prediction performance. The predicted position is transformed to global coordinate frame which is then fused along with the odometry of other peripheral sensors like IMU, barometer, compass etc., using the onboard extended Kalman filter to estimate the states of the UAV. The experimental flight data collected from a motion capture facility using a micro-UAV is used to train the SN-MNN. The PX4-ECL library is used to replay the flight data using the proposed algorithm, and the estimated position is compared with actual ground truth data. The proposed algorithm doesn't require any additional onboard sensors, and is computationally light. The performance of the proposed approach is compared with the current state-of-art GPS-denied algorithms, and it can be seen that the proposed algorithm has the least RMSE for position estimates.
An Input-Output Feedback Linearization based Exponentially Stable Controller for Multi-UAV Payload Transport
Jul 10, 2022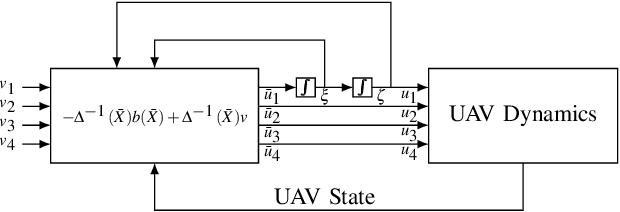
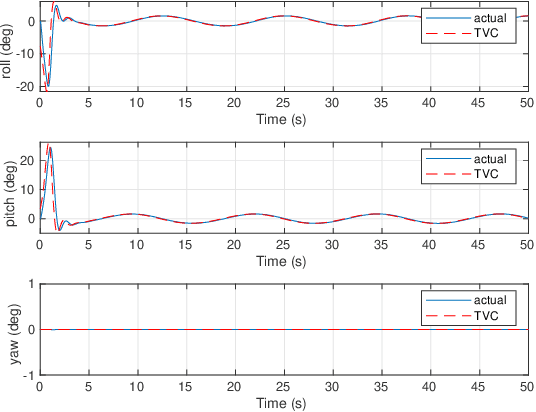
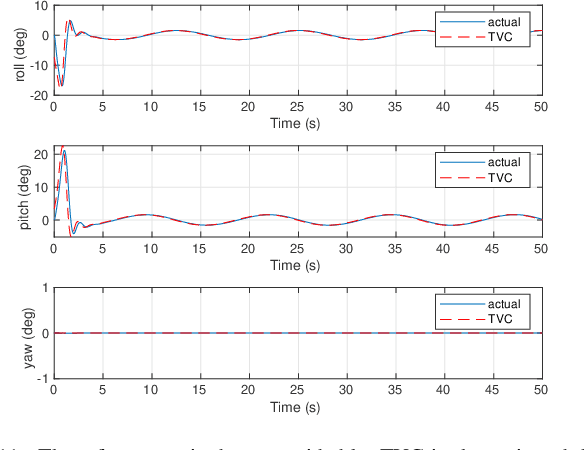
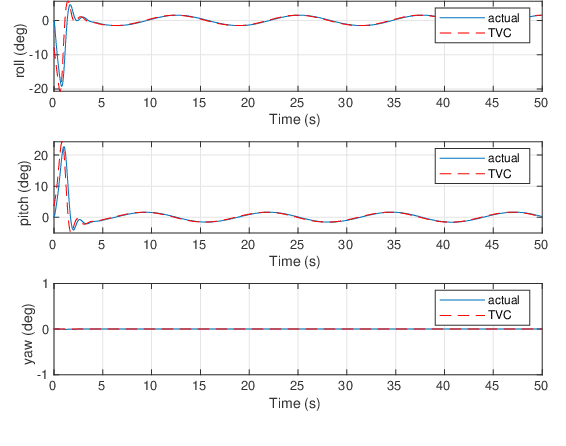
In this paper, an exponentially stable trajectory tracking controller is proposed for multi-UAV payload transport. The multi-UAV payload system has a 2-DOF magnetic spherical joint between the UAVs and the vertical rigid links of the payload frame, so the UAVs can roll or pitch freely. These vertical links are rigidly attached to the payload and cannot move. An input-output feedback linearized model is derived for the complete payload-UAV system along with thrust vectoring control for trajectory tracking of the payload. The theoretical analysis on tracking control laws shows that control law is exponentially stable, thus guaranteeing safe transportation along the desired trajectory. To validate the performance of the proposed control law, the results for a numerical simulation as well as a high-fidelity Gazebo real-time simulation are presented. Next, the robustness of the proposed controller is analyzed against two practical situations: External disturbance on the payload and payload mass uncertainty. The results clearly indicate that the proposed controller is robust and computationally efficient while achieving exponentially stable trajectory tracking.
Integrated Decision Control Approach for Cooperative Safety-Critical Payload Transport in a Cluttered Environment
Jan 31, 2022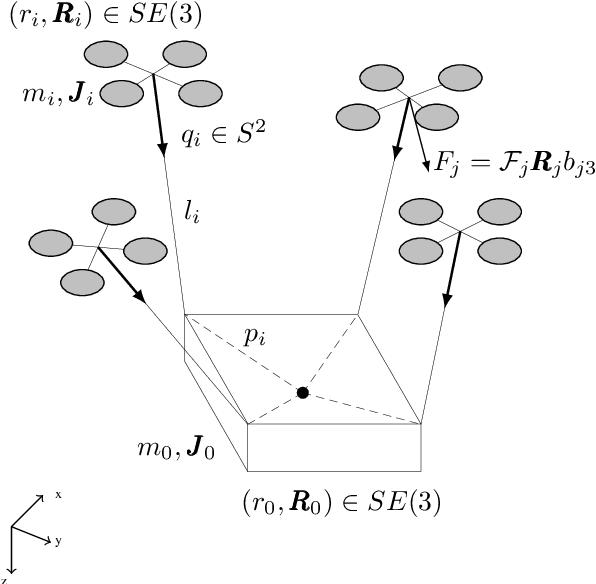
In this paper, the problem of coordinated transportation of heavy payload by a team of UAVs in a cluttered environment is addressed. The payload is modeled as a rigid body and is assumed to track a pre-computed global flight trajectory from a start point to a goal point. Due to the presence of local dynamic obstacles in the environment, the UAVs must ensure that there is no collision between the payload and these obstacles while ensuring that the payload oscillations are kept minimum. An Integrated Decision Controller (IDC) is proposed, that integrates the optimal tracking control law given by a centralized Model Predictive Controller with safety-critical constraints provided by the Exponential Control Barrier Functions. The entire payload-UAV system is enclosed by a safe convex hull boundary, and the IDC ensures that no obstacle enters this boundary. To evaluate the performance of the IDC, the results for a numerical simulation as well as a high-fidelity Gazebo simulation are presented. An ablation study is conducted to analyze the robustness of the proposed IDC against practical dubieties like noisy state values, relative obstacle safety margin, and payload mass uncertainty. The results clearly show that the IDC achieves both trajectory tracking and obstacle avoidance successfully while restricting the payload oscillations within a safe limit.
Spatio-Temporal Look-Ahead Trajectory Prediction using Memory Neural Network
Feb 24, 2021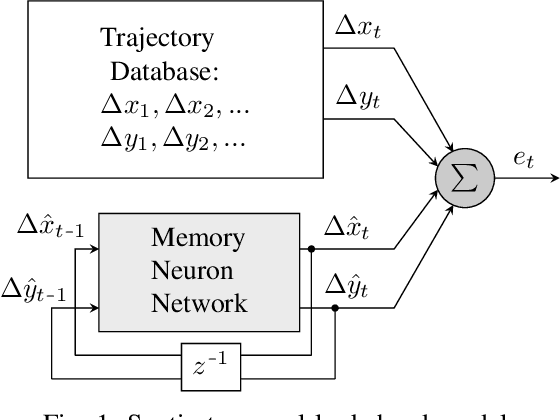
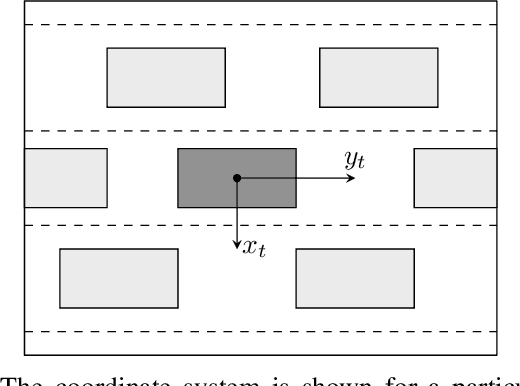
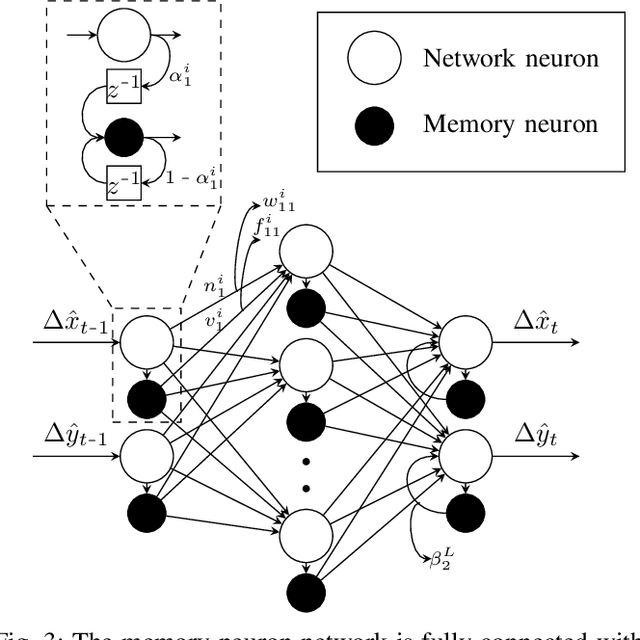
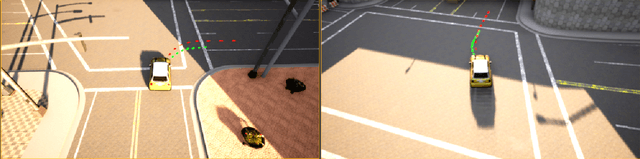
Prognostication of vehicle trajectories in unknown environments is intrinsically a challenging and difficult problem to solve. The behavior of such vehicles is highly influenced by surrounding traffic, road conditions, and rogue participants present in the environment. Moreover, the presence of pedestrians, traffic lights, stop signs, etc., makes it much harder to infer the behavior of various traffic agents. This paper attempts to solve the problem of Spatio-temporal look-ahead trajectory prediction using a novel recurrent neural network called the Memory Neuron Network. The Memory Neuron Network (MNN) attempts to capture the input-output relationship between the past positions and the future positions of the traffic agents. The proposed model is computationally less intensive and has a simple architecture as compared to other deep learning models that utilize LSTMs and GRUs. It is then evaluated on the publicly available NGSIM dataset and its performance is compared with several state-of-art algorithms. Additionally, the performance is also evaluated on a custom synthetic dataset generated from the CARLA simulator. It is seen that the proposed model outperforms the existing state-of-art algorithms. Finally, the model is integrated with the CARLA simulator to test its robustness in real-time traffic scenarios.