 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge5G-DIL: Domain Incremental Learning with Similarity-Aware Sampling for Dynamic 5G Indoor Localization
May 23, 2025Indoor positioning based on 5G data has achieved high accuracy through the adoption of recent machine learning (ML) techniques. However, the performance of learning-based methods degrades significantly when environmental conditions change, thereby hindering their applicability to new scenarios. Acquiring new training data for each environmental change and fine-tuning ML models is both time-consuming and resource-intensive. This paper introduces a domain incremental learning (DIL) approach for dynamic 5G indoor localization, called 5G-DIL, enabling rapid adaptation to environmental changes. We present a novel similarity-aware sampling technique based on the Chebyshev distance, designed to efficiently select specific exemplars from the previous environment while training only on the modified regions of the new environment. This avoids the need to train on the entire region, significantly reducing the time and resources required for adaptation without compromising localization accuracy. This approach requires as few as 50 exemplars from adaptation domains, significantly reducing training time while maintaining high positioning accuracy in previous environments. Comparative evaluations against state-of-the-art DIL techniques on a challenging real-world indoor dataset demonstrate the effectiveness of the proposed sample selection method. Our approach is adaptable to real-world non-line-of-sight propagation scenarios and achieves an MAE positioning error of 0.261 meters, even under dynamic environmental conditions. Code: https://gitlab.cc-asp.fraunhofer.de/5g-pos/5g-dil
Few-Shot Learning with Uncertainty-based Quadruplet Selection for Interference Classification in GNSS Data
Feb 09, 2024



Jamming devices pose a significant threat by disrupting signals from the global navigation satellite system (GNSS), compromising the robustness of accurate positioning. Detecting anomalies in frequency snapshots is crucial to counteract these interferences effectively. The ability to adapt to diverse, unseen interference characteristics is essential for ensuring the reliability of GNSS in real-world applications. In this paper, we propose a few-shot learning (FSL) approach to adapt to new interference classes. Our method employs quadruplet selection for the model to learn representations using various positive and negative interference classes. Furthermore, our quadruplet variant selects pairs based on the aleatoric and epistemic uncertainty to differentiate between similar classes. We recorded a dataset at a motorway with eight interference classes on which our FSL method with quadruplet loss outperforms other FSL techniques in jammer classification accuracy with 97.66%.
Benchmarking Visual-Inertial Deep Multimodal Fusion for Relative Pose Regression and Odometry-aided Absolute Pose Regression
Aug 01, 2022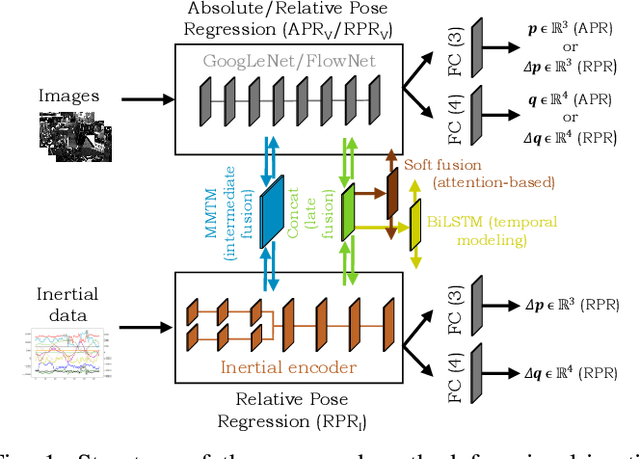
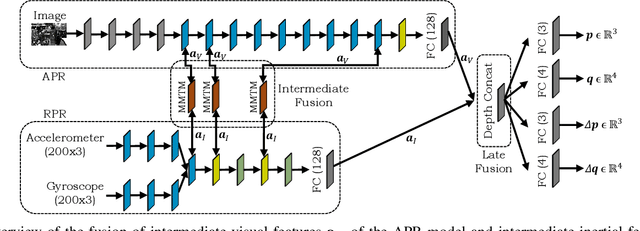
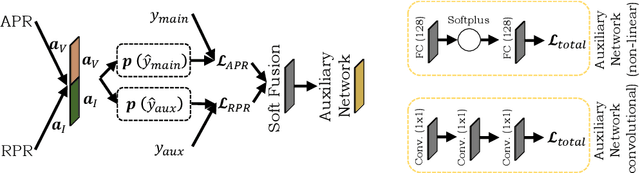
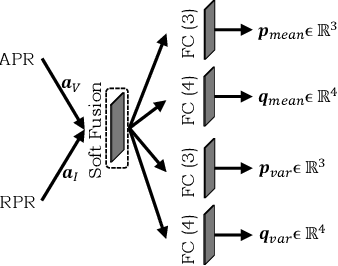
Visual-inertial localization is a key problem in computer vision and robotics applications such as virtual reality, self-driving cars, and aerial vehicles. The goal is to estimate an accurate pose of an object when either the environment or the dynamics are known. Recent methods directly regress the pose using convolutional and spatio-temporal networks. Absolute pose regression (APR) techniques predict the absolute camera pose from an image input in a known scene. Odometry methods perform relative pose regression (RPR) that predicts the relative pose from a known object dynamic (visual or inertial inputs). The localization task can be improved by retrieving information of both data sources for a cross-modal setup, which is a challenging problem due to contradictory tasks. In this work, we conduct a benchmark to evaluate deep multimodal fusion based on PGO and attention networks. Auxiliary and Bayesian learning are integrated for the APR task. We show accuracy improvements for the RPR-aided APR task and for the RPR-RPR task for aerial vehicles and hand-held devices. We conduct experiments on the EuRoC MAV and PennCOSYVIO datasets, and record a novel industry dataset.