 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniTeD: Unified Temporal Diffusion for Joint Perception and Planning in Autonomous Driving
Jun 24, 2026Diffusion models have shown strong potential for multi-modal planning in end-to-end autonomous driving. However, most existing methods confine diffusion to the planning module, conditioning on fixed outputs from separate discriminative perception networks. This decoupled design propagates perception errors to the planner, increasing optimization difficulty and reducing robustness. To overcome these limitations, we propose UniTeD, a Unified Temporal Diffusion framework that jointly models perception and planning through iterative denoising in a shared generative space. By enabling bidirectional information exchange, the framework facilitates mutual refinement between tasks and improves robustness via noise-conditioned multi-task training. We further extend this unified diffusion paradigm to a streaming setting by incorporating temporal context. A Temporal Transition Module (TTM) is introduced to resolve the noise-level mismatch between historical and current frames. In addition, we propose an Anchor Refresh Strategy (ARS) to alleviate the training-inference distribution shift commonly observed in sparse diffusion-based end-to-end driving frameworks. Without bells and whistles, UniTeD achieves state-of-the-art performance across multiple benchmarks, surpassing both recent discriminative end-to-end methods and diffusion-based planning approaches.
Traffic Context Aware Data Augmentation for Rare Object Detection in Autonomous Driving
May 01, 2022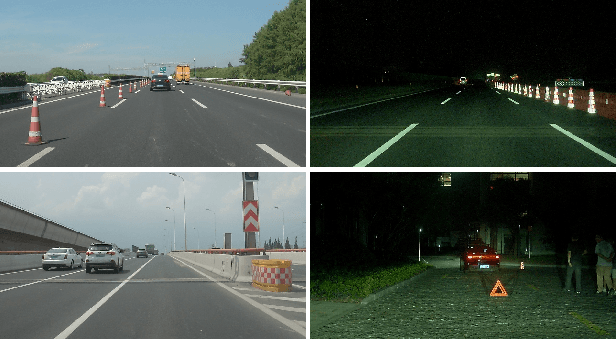
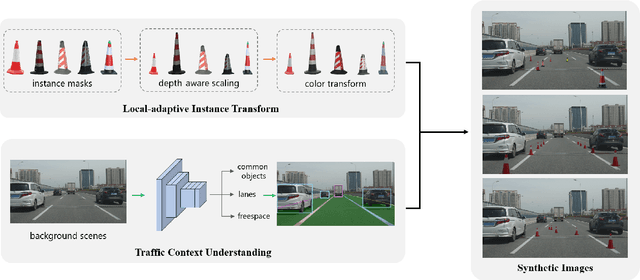

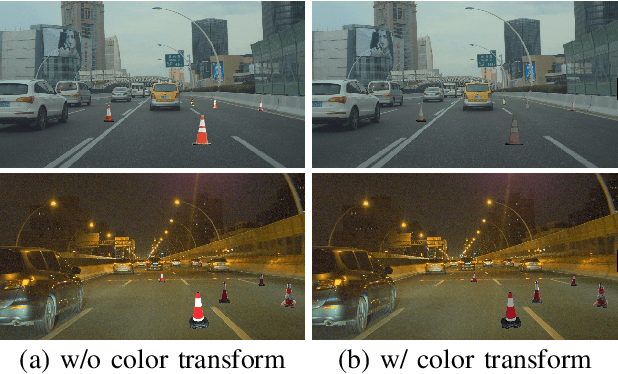
Detection of rare objects (e.g., traffic cones, traffic barrels and traffic warning triangles) is an important perception task to improve the safety of autonomous driving. Training of such models typically requires a large number of annotated data which is expensive and time consuming to obtain. To address the above problem, an emerging approach is to apply data augmentation to automatically generate cost-free training samples. In this work, we propose a systematic study on simple Copy-Paste data augmentation for rare object detection in autonomous driving. Specifically, local adaptive instance-level image transformation is introduced to generate realistic rare object masks from source domain to the target domain. Moreover, traffic scene context is utilized to guide the placement of masks of rare objects. To this end, our data augmentation generates training data with high quality and realistic characteristics by leveraging both local and global consistency. In addition, we build a new dataset named NM10k consisting 10k training images, 4k validation images and the corresponding labels with a diverse range of scenarios in autonomous driving. Experiments on NM10k show that our method achieves promising results on rare object detection. We also present a thorough study to illustrate the effectiveness of our local-adaptive and global constraints based Copy-Paste data augmentation for rare object detection. The data, development kit and more information of NM10k dataset are available online at: \url{https://nullmax-vision.github.io}.