 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Fusion using Extended Jaccard Graph and Stochastic Gradient Descent for Robot
Mar 24, 2017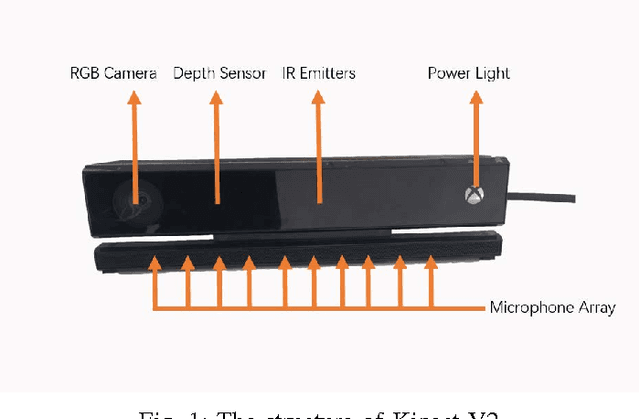
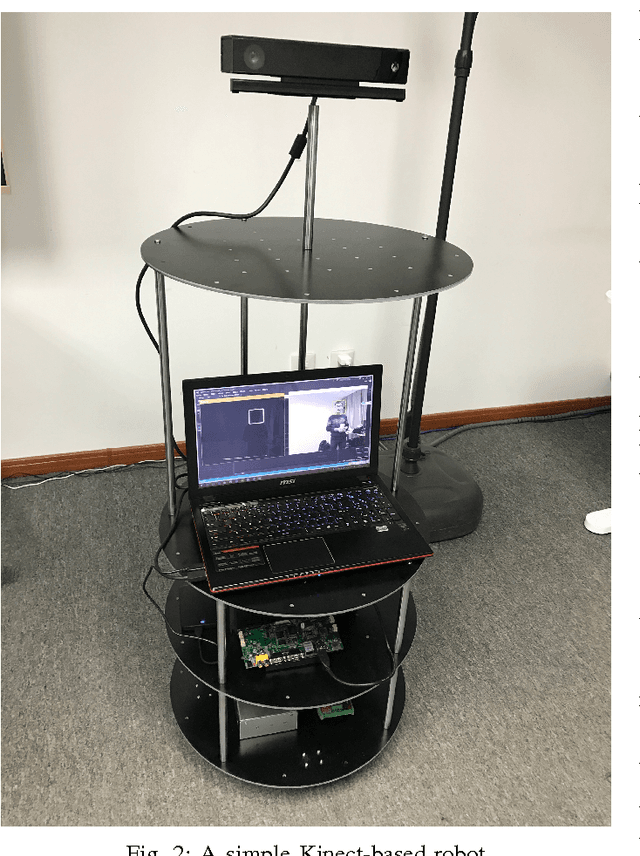
Robot vision is a fundamental device for human-robot interaction and robot complex tasks. In this paper, we use Kinect and propose a feature graph fusion (FGF) for robot recognition. Our feature fusion utilizes RGB and depth information to construct fused feature from Kinect. FGF involves multi-Jaccard similarity to compute a robust graph and utilize word embedding method to enhance the recognition results. We also collect DUT RGB-D face dataset and a benchmark datset to evaluate the effectiveness and efficiency of our method. The experimental results illustrate FGF is robust and effective to face and object datasets in robot applications.
Three Tiers Neighborhood Graph and Multi-graph Fusion Ranking for Multi-feature Image Retrieval: A Manifold Aspect
Sep 24, 2016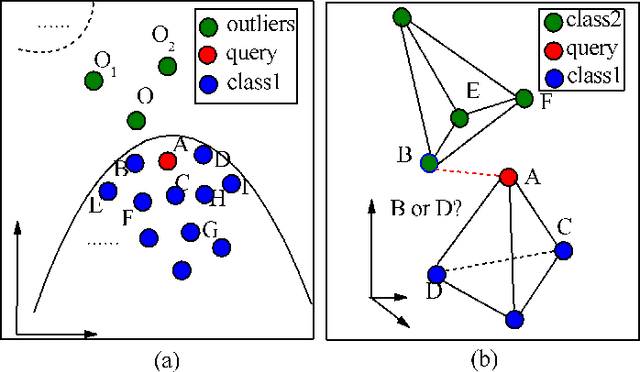
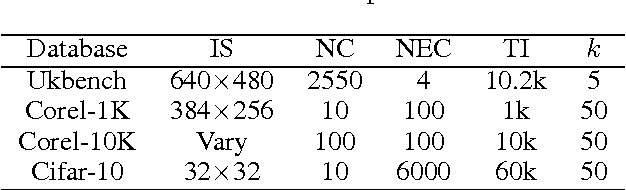
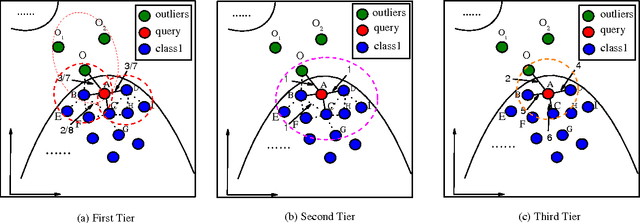
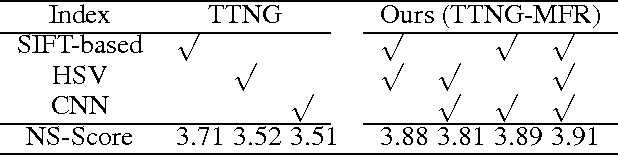
Single feature is inefficient to describe content of an image, which is a shortcoming in traditional image retrieval task. We know that one image can be described by different features. Multi-feature fusion ranking can be utilized to improve the ranking list of query. In this paper, we first analyze graph structure and multi-feature fusion re-ranking from manifold aspect. Then, Three Tiers Neighborhood Graph (TTNG) is constructed to re-rank the original ranking list by single feature and to enhance precision of single feature. Furthermore, we propose Multi-graph Fusion Ranking (MFR) for multi-feature ranking, which considers the correlation of all images in multiple neighborhood graphs. Evaluations are conducted on UK-bench, Corel-1K, Corel-10K and Cifar-10 benchmark datasets. The experimental results show that our TTNG and MFR outperform than other state-of-the-art methods. For example, we achieve competitive results N-S score 3.91 and precision 65.00% on UK-bench and Corel-10K datasets respectively.