 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Quadrupedal Legged and Aerial Locomotion via Structure Repurposing
Oct 10, 2025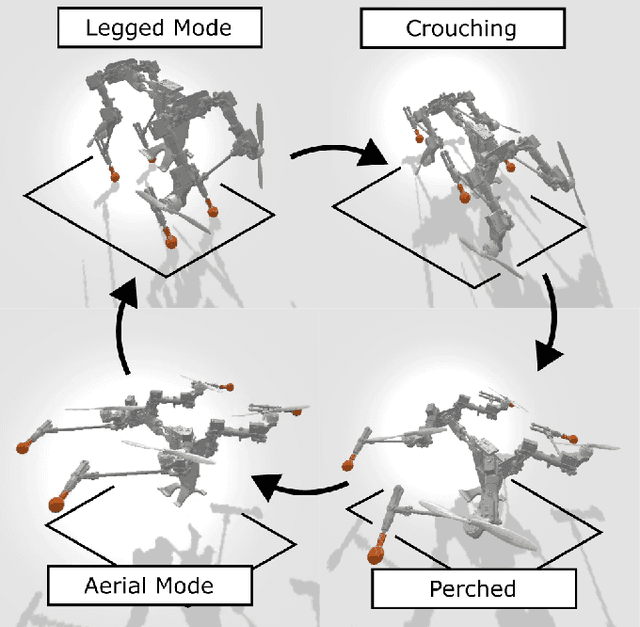
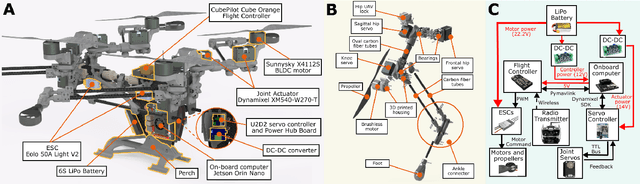
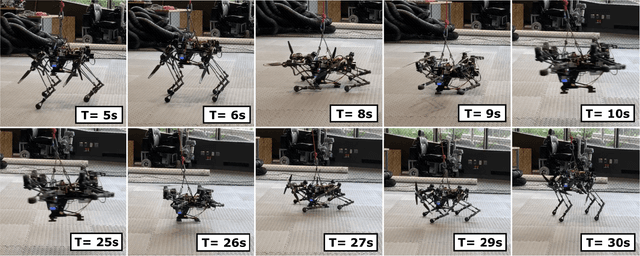
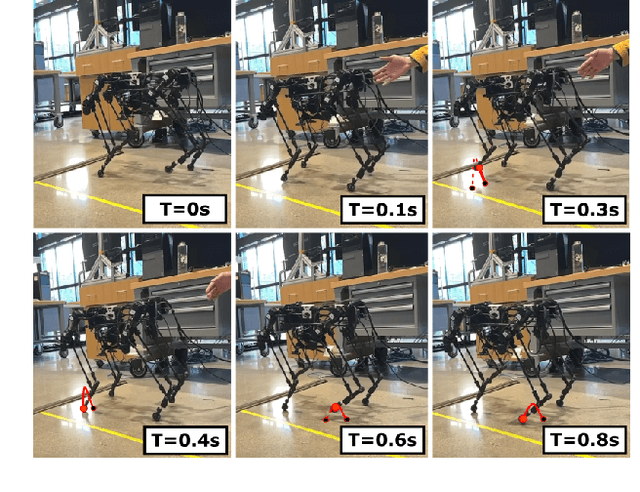
Multi-modal ground-aerial robots have been extensively studied, with a significant challenge lying in the integration of conflicting requirements across different modes of operation. The Husky robot family, developed at Northeastern University, and specifically the Husky v.2 discussed in this study, addresses this challenge by incorporating posture manipulation and thrust vectoring into multi-modal locomotion through structure repurposing. This quadrupedal robot features leg structures that can be repurposed for dynamic legged locomotion and flight. In this paper, we present the hardware design of the robot and report primary results on dynamic quadrupedal legged locomotion and hovering.
A Narwhal-Inspired Sensing-to-Control Framework for Small Fixed-Wing Aircraft
Oct 08, 2025



Fixed-wing unmanned aerial vehicles (UAVs) offer endurance and efficiency but lack low-speed agility due to highly coupled dynamics. We present an end-to-end sensing-to-control pipeline that combines bio-inspired hardware, physics-informed dynamics learning, and convex control allocation. Measuring airflow on a small airframe is difficult because near-body aerodynamics, propeller slipstream, control-surface actuation, and ambient gusts distort pressure signals. Inspired by the narwhal's protruding tusk, we mount in-house multi-hole probes far upstream and complement them with sparse, carefully placed wing pressure sensors for local flow measurement. A data-driven calibration maps probe pressures to airspeed and flow angles. We then learn a control-affine dynamics model using the estimated airspeed/angles and sparse sensors. A soft left/right symmetry regularizer improves identifiability under partial observability and limits confounding between wing pressures and flaperon inputs. Desired wrenches (forces and moments) are realized by a regularized least-squares allocator that yields smooth, trimmed actuation. Wind-tunnel studies across a wide operating range show that adding wing pressures reduces force-estimation error by 25-30%, the proposed model degrades less under distribution shift (about 12% versus 44% for an unstructured baseline), and force tracking improves with smoother inputs, including a 27% reduction in normal-force RMSE versus a plain affine model and 34% versus an unstructured baseline.
Self-supervised cost of transport estimation for multimodal path planning
Dec 08, 2024Autonomous robots operating in real environments are often faced with decisions on how best to navigate their surroundings. In this work, we address a particular instance of this problem: how can a robot autonomously decide on the energetically optimal path to follow given a high-level objective and information about the surroundings? To tackle this problem we developed a self-supervised learning method that allows the robot to estimate the cost of transport of its surroundings using only vision inputs. We apply our method to the multi-modal mobility morphobot (M4), a robot that can drive, fly, segway, and crawl through its environment. By deploying our system in the real world, we show that our method accurately assigns different cost of transports to various types of environments e.g. grass vs smooth road. We also highlight the low computational cost of our method, which is deployed on an Nvidia Jetson Orin Nano robotic compute unit. We believe that this work will allow multi-modal robotic platforms to unlock their full potential for navigation and exploration tasks.
Enhanced Capture Point Control Using Thruster Dynamics and QP-Based Optimization for Harpy
Nov 21, 2024Our work aims to make significant strides in understanding unexplored locomotion control paradigms based on the integration of posture manipulation and thrust vectoring. These techniques are commonly seen in nature, such as Chukar birds using their wings to run on a nearly vertical wall. In this work, we developed a capture-point-based controller integrated with a quadratic programming (QP) solver which is used to create a thruster-assisted dynamic bipedal walking controller for our state-of-the-art Harpy platform. Harpy is a bipedal robot capable of legged-aerial locomotion using its legs and thrusters attached to its main frame. While capture point control based on centroidal models for bipedal systems has been extensively studied, the use of these thrusters in determining the capture point for a bipedal robot has not been extensively explored. The addition of these external thrust forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. In this work, we derive a thruster-assisted bipedal walking with the capture point controller and implement it in simulation to study its performance.
Conjugate momentum based thruster force estimate in dynamic multimodal robot
Nov 21, 2024In a multi-modal system which combines thruster and legged locomotion such our state-of-the-art Harpy platform to perform dynamic locomotion. Therefore, it is very important to have a proper estimate of Thruster force. Harpy is a bipedal robot capable of legged-aerial locomotion using its legs and thrusters attached to its main frame. we can characterize thruster force using a thrust stand but it generally does not account for working conditions such as battery voltage. In this study, we present a momentum-based thruster force estimator. One of the key information required to estimate is terrain information. we show estimation results with and without terrain knowledge. In this work, we derive a conjugate momentum thruster force estimator and implement it on a numerical simulator that uses thruster force to perform thruster-assisted walking.
Quadratic Programming Optimization for Bio-Inspired Thruster-Assisted Bipedal Locomotion on Inclined Slopes
Nov 20, 2024



Our work aims to make significant strides in understanding unexplored locomotion control paradigms based on the integration of posture manipulation and thrust vectoring. These techniques are commonly seen in nature, such as Chukar birds using their wings to run on a nearly vertical wall. In this work, we show quadratic programming with contact constraints which is then given to the whole body controller to map on robot states to produce a thruster-assisted slope walking controller for our state-of-the-art Harpy platform. Harpy is a bipedal robot capable of legged-aerial locomotion using its legs and thrusters attached to its main frame. The optimization-based walking controller has been used for dynamic locomotion such as slope walking, but the addition of thrusters to perform inclined slope walking has not been extensively explored. In this work, we derive a thruster-assisted bipedal walking with the quadratic programming (QP) controller and implement it in simulation to study its performance.
Enabling steep slope walking on Husky using reduced order modeling and quadratic programming
Nov 18, 2024Wing-assisted inclined running (WAIR) observed in some young birds, is an attractive maneuver that can be extended to legged aerial systems. This study proposes a control method using a modified Variable Length Inverted Pendulum (VLIP) by assuming a fixed zero moment point and thruster forces collocated at the center of mass of the pendulum. A QP MPC is used to find the optimal ground reaction forces and thruster forces to track a reference position and velocity trajectory. Simulation results of this VLIP model on a slope of 40 degrees is maintained and shows thruster forces that can be obtained through posture manipulation. The simulation also provides insight to how the combined efforts of the thrusters and the tractive forces from the legs make WAIR possible in thruster-assisted legged systems.
Optimization free control and ground force estimation with momentum observer for a multimodal legged aerial robot
Nov 18, 2024



Legged-aerial multimodal robots can make the most of both legged and aerial systems. In this paper, we propose a control framework that bypasses heavy onboard computers by using an optimization-free Explicit Reference Governor that incorporates external thruster forces from an attitude controller. Ground reaction forces are maintained within friction cone constraints using costly optimization solvers, but the ERG framework filters applied velocity references that ensure no slippage at the foot end. We also propose a Conjugate momentum observer, that is widely used in Disturbance Observation to estimate ground reaction forces and compare its efficacy against a constrained model in estimating ground reaction forces in a reduced-order simulation of Husky.
Capture Point Control in Thruster-Assisted Bipedal Locomotion
Jun 21, 2024



Despite major advancements in control design that are robust to unplanned disturbances, bipedal robots are still susceptible to falling over and struggle to negotiate rough terrains. By utilizing thrusters in our bipedal robot, we can perform additional posture manipulation and expand the modes of locomotion to enhance the robot's stability and ability to negotiate rough and difficult-to-navigate terrains. In this paper, we present our efforts in designing a controller based on capture point control for our thruster-assisted walking model named Harpy and explore its control design possibilities. While capture point control based on centroidal models for bipedal systems has been extensively studied, the incorporation of external forces that can influence the dynamics of linear inverted pendulum models, often used in capture point-based works, has not been explored before. The inclusion of these external forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. This paper outlines the dynamical model of our robot, the capture point method we use to assist the upper body stabilization, and the simulation work done to show the controller's feasibility.
Thruster-Assisted Incline Walking
Jun 19, 2024



In this study, our aim is to evaluate the effectiveness of thruster-assisted steep slope walking for the Husky Carbon, a quadrupedal robot equipped with custom-designed actuators and plural electric ducted fans, through simulation prior to conducting experimental trials. Thruster-assisted steep slope walking draws inspiration from wing-assisted incline running (WAIR) observed in birds, and intriguingly incorporates posture manipulation and thrust vectoring, a locomotion technique not previously explored in the animal kingdom. Our approach involves developing a reduced-order model of the Husky robot, followed by the application of an optimization-based controller utilizing collocation methods and dynamics interpolation to determine control actions. Through simulation testing, we demonstrate the feasibility of hardware implementation of our controller.