 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndividuality in Swarm Robots with the Case Study of Kilobots: Noise, Bug, or Feature?
May 25, 2023



Inter-individual differences are studied in natural systems, such as fish, bees, and humans, as they contribute to the complexity of both individual and collective behaviors. However, individuality in artificial systems, such as robotic swarms, is undervalued or even overlooked. Agent-specific deviations from the norm in swarm robotics are usually understood as mere noise that can be minimized, for example, by calibration. We observe that robots have consistent deviations and argue that awareness and knowledge of these can be exploited to serve a task. We measure heterogeneity in robot swarms caused by individual differences in how robots act, sense, and oscillate. Our use case is Kilobots and we provide example behaviors where the performance of robots varies depending on individual differences. We show a non-intuitive example of phototaxis with Kilobots where the non-calibrated Kilobots show better performance than the calibrated supposedly ``ideal" one. We measure the inter-individual variations for heterogeneity in sensing and oscillation, too. We briefly discuss how these variations can enhance the complexity of collective behaviors. We suggest that by recognizing and exploring this new perspective on individuality, and hence diversity, in robotic swarms, we can gain a deeper understanding of these systems and potentially unlock new possibilities for their design and implementation of applications.
Estimation of continuous environments by robot swarms: Correlated networks and decision-making
Mar 15, 2023Collective decision-making is an essential capability of large-scale multi-robot systems to establish autonomy on the swarm level. A large portion of literature on collective decision-making in swarm robotics focuses on discrete decisions selecting from a limited number of options. Here we assign a decentralized robot system with the task of exploring an unbounded environment, finding consensus on the mean of a measurable environmental feature, and aggregating at areas where that value is measured (e.g., a contour line). A unique quality of this task is a causal loop between the robots' dynamic network topology and their decision-making. For example, the network's mean node degree influences time to convergence while the currently agreed-on mean value influences the swarm's aggregation location, hence, also the network structure as well as the precision error. We propose a control algorithm and study it in real-world robot swarm experiments in different environments. We show that our approach is effective and achieves higher precision than a control experiment. We anticipate applications, for example, in containing pollution with surface vehicles.
Cooperative Pollution Source Localization and Cleanup with a Bio-inspired Swarm Robot Aggregation
Jul 22, 2019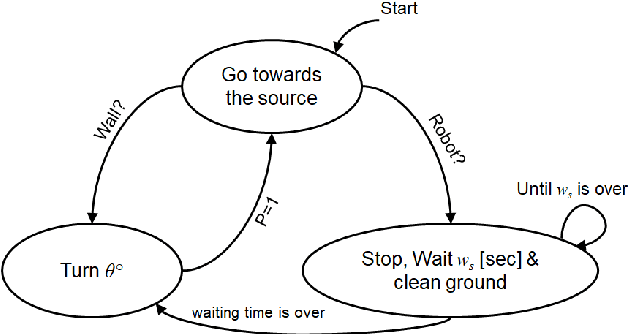
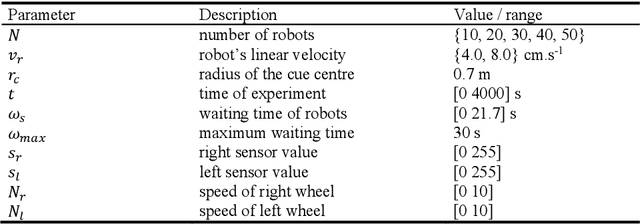
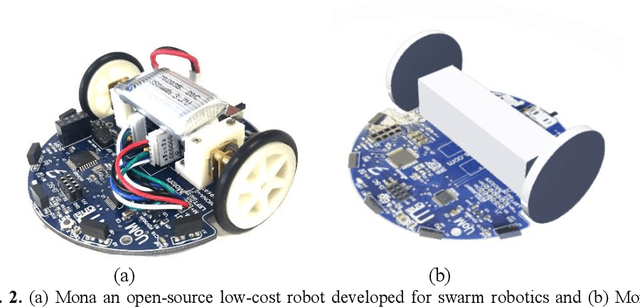

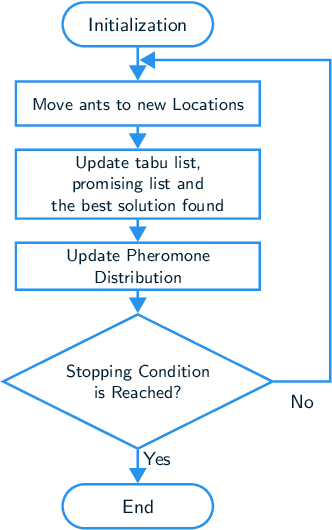
Using robots for exploration of extreme and hazardous environments has the potential to significantly improve human safety. For example, robotic solutions can be deployed to find the source of a chemical leakage and clean the contaminated area. This paper demonstrates a proof-of-concept bio-inspired exploration method using a swarm robotic system, which is based on a combination of two bio-inspired behaviours: aggregation, and pheromone tracking. The main idea of the work presented is to follow pheromone trails to find the source of a chemical leakage and then carry out a decontamination task by aggregating at the critical zone. Using experiments conducted by a simulated model of a Mona robot, we evaluate the effects of population size and robot speed on the ability of the swarm in a decontamination task. The results indicate the feasibility of deploying robotic swarms in an exploration and cleaning task in an extreme environment.
Self-organized Collective Motion with a Simulated Real Robot Swarm
Apr 05, 2019
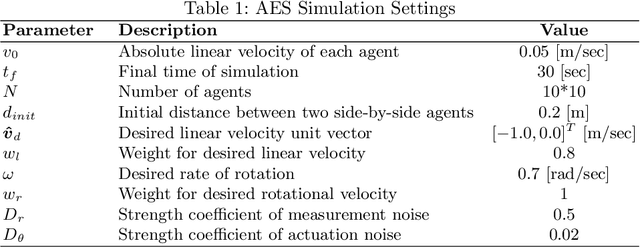
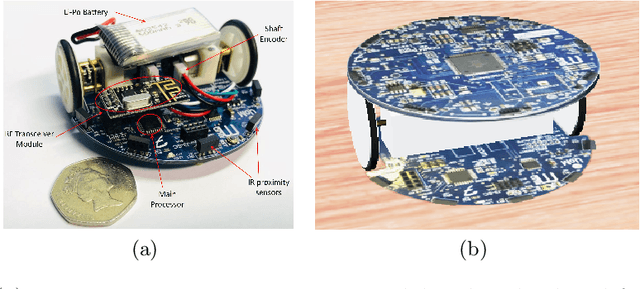
Collective motion is one of the most fascinating phenomena observed in the nature. In the last decade, it aroused so much attention in physics, control and robotics fields. In particular, many studies have been done in swarm robotics related to collective motion, also called flocking. In most of these studies, robots use orientation and proximity of their neighbors to achieve collective motion. In such an approach, one of the biggest problems is to measure orientation information using on-board sensors. In most of the studies, this information is either simulated or implemented using communication. In this paper, to the best of our knowledge, we implemented a fully autonomous coordinated motion without alignment using very simple Mona robots. We used an approach based on Active Elastic Sheet (AES) method. We modified the method and added the capability to enable the swarm to move toward a desired direction and rotate about an arbitrary point. The parameters of the modified method are optimized using TCACS optimization algorithm. We tested our approach in different settings using Matlab and Webots.