 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry of Radial Basis Neural Networks for Safety Biased Approximation of Unsafe Regions
Oct 11, 2022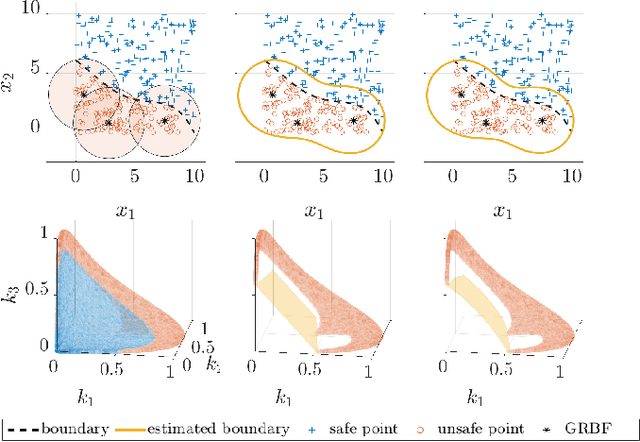
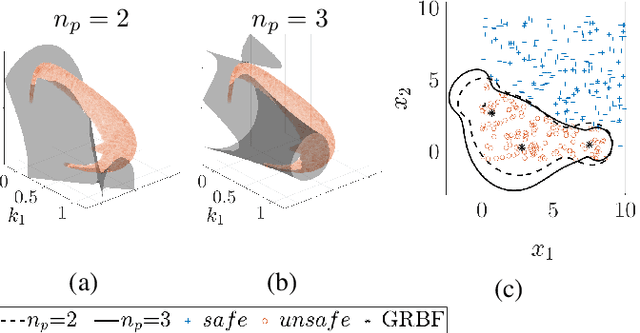

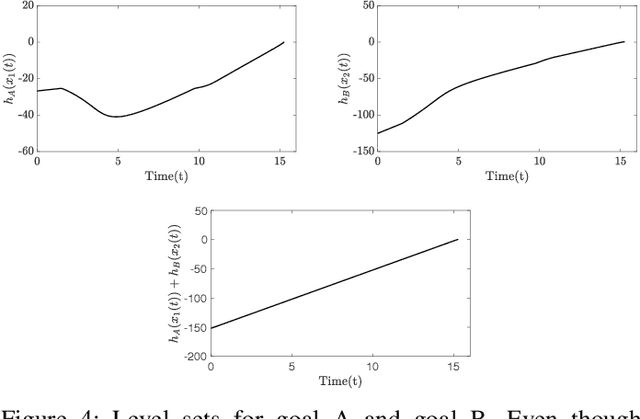
Barrier function-based inequality constraints are a means to enforce safety specifications for control systems. When used in conjunction with a convex optimization program, they provide a computationally efficient method to enforce safety for the general class of control-affine systems. One of the main assumptions when taking this approach is the a priori knowledge of the barrier function itself, i.e., knowledge of the safe set. In the context of navigation through unknown environments where the locally safe set evolves with time, such knowledge does not exist. This manuscript focuses on the synthesis of a zeroing barrier function characterizing the safe set based on safe and unsafe sample measurements, e.g., from perception data in navigation applications. Prior work formulated a supervised machine learning algorithm whose solution guaranteed the construction of a zeroing barrier function with specific level-set properties. However, it did not explore the geometry of the neural network design used for the synthesis process. This manuscript describes the specific geometry of the neural network used for zeroing barrier function synthesis, and shows how the network provides the necessary representation for splitting the state space into safe and unsafe regions.
Synthesis of Control Barrier Functions Using a Supervised Machine Learning Approach
Mar 10, 2020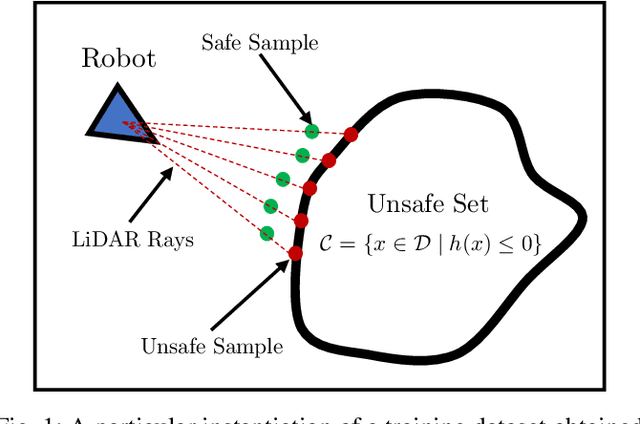
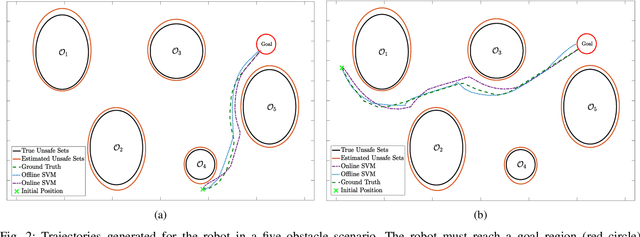
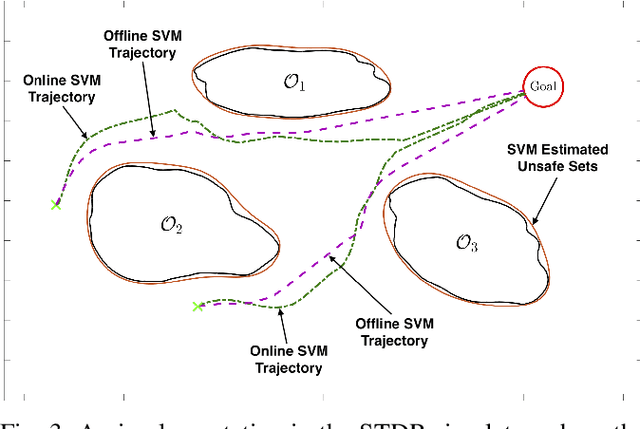
Control barrier functions are mathematical constructs used to guarantee safety for robotic systems. When integrated as constraints in a quadratic programming optimization problem, instantaneous control synthesis with real-time performance demands can be achieved for robotics applications. Prevailing use has assumed full knowledge of the safety barrier functions, however there are cases where the safe regions must be estimated online from sensor measurements. In these cases, the corresponding barrier function must be synthesized online. This paper describes a learning framework for estimating control barrier functions from sensor data. Doing so affords system operation in unknown state space regions without compromising safety. Here, a support vector machine classifier provides the barrier function specification as determined by sets of safe and unsafe states obtained from sensor measurements. Theoretical safety guarantees are provided. Experimental ROS-based simulation results for an omnidirectional robot equipped with LiDAR demonstrate safe operation.
Extent-Compatible Control Barrier Functions
Jan 20, 2020

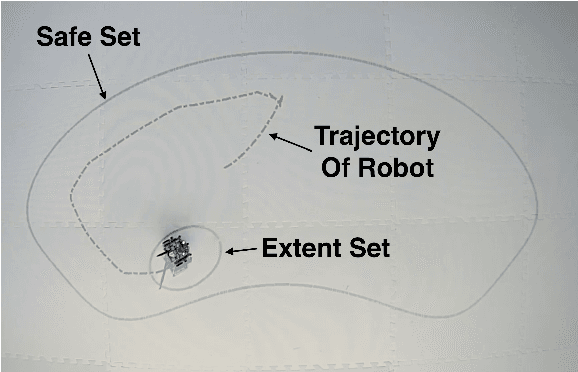
Safety requirements in dynamical systems are commonly enforced with set invariance constraints over a safe region of the state space. Control barrier functions, which are Lyapunov-like functions for guaranteeing set invariance, are an effective tool to enforce such constraints and guarantee safety when the system is represented as a point in the state space. In this paper, we introduce extent-compatible control barrier functions as a tool to enforce safety for the system including its volume (extent) in the physical world. In order to implement the extent-compatible control barrier functions framework, a sum-of-squares based optimization program is proposed. Since sum-of-squares programs can be computationally prohibitive, we additionally introduce a sampling based method in order to retain the computational advantage of a traditional barrier function based quadratic program controller. We prove that the proposed sampling based controller retains the guarantee for safety. Simulation and robotic implementation results are also provided.
Control Of Mobile Robots Using Barrier Functions Under Temporal Logic Specifications
Aug 14, 2019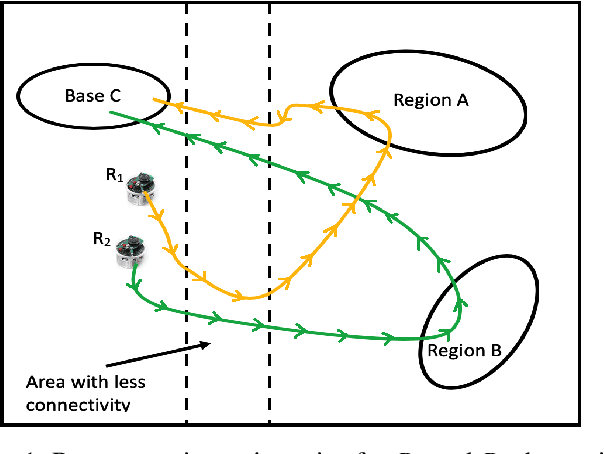
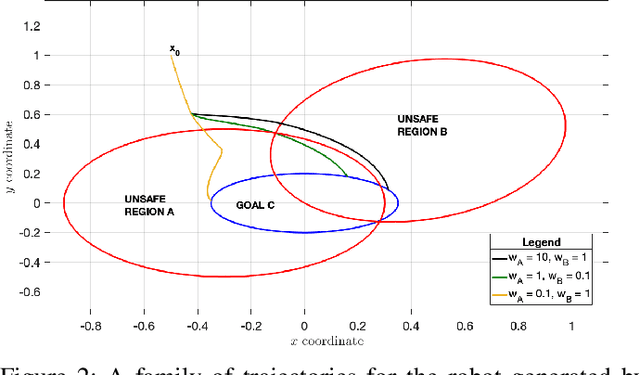
In this paper, we propose a framework for the control of mobile robots subject to temporal logic specifications using barrier functions. Complex task specifications can be conveniently encoded using linear temporal logic (LTL). In particular, we consider a fragment of LTL which encompasses a large class of motion planning specifications for a robotic system. Control barrier functions (CBFs) have recently emerged as a convenient tool to guarantee reachability and safety for a system. In addition, they can be encoded as affine constraints in a quadratic program (QP). In the case of complex system specifications, we show that following QP based methods in existing literature can lead to infeasibility and hence we provide a method of composition of multiple barrier functions in order to mitigate infeasibility. A scheme to prioritize different barrier functions which allows the user to encode the notion of priority based control, is also introduced. We prove that the resulting system trajectory synthesized by the proposed controller satisfies the given specification. Robotic simulation and experimental results are provided in addition to the theoretical framework.
A Sequential Composition Framework for Coordinating Multi-Robot Behaviors
Jul 17, 2019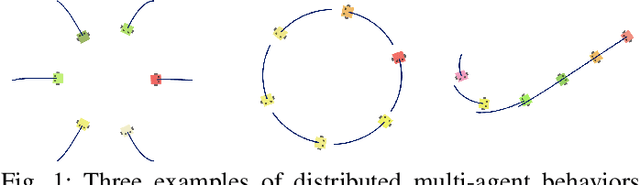
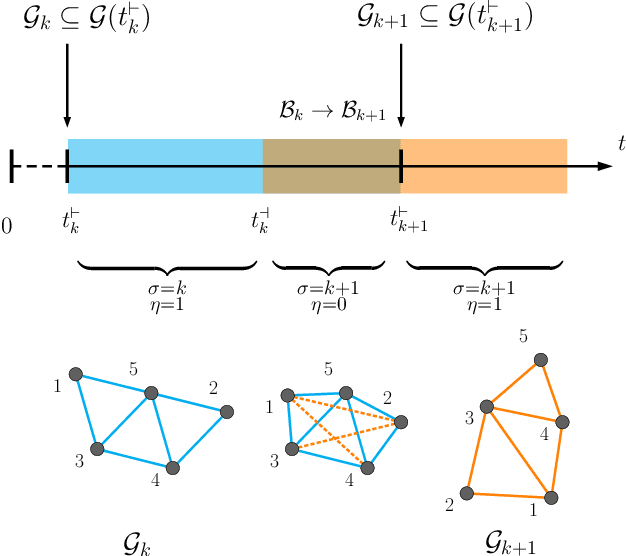
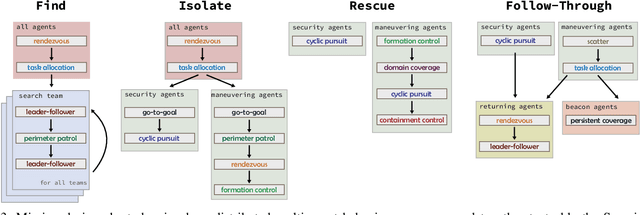
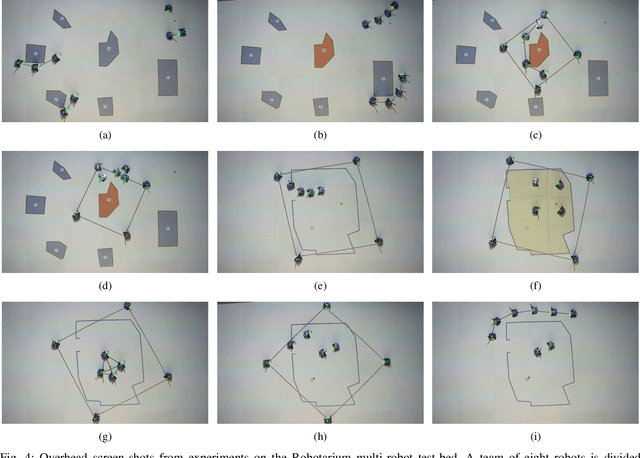
A number of coordinated behaviors have been proposed for achieving specific tasks for multi-robot systems. However, since most applications require more than one such behavior, one needs to be able to compose together sequences of behaviors while respecting local information flow constraints. Specifically, when the inter-agent communication depends on inter-robot distances, these constraints translate into particular configurations that must be reached in finite time in order for the system to be able to transition between the behaviors. To this end, we develop a framework based on finite-time convergence control barrier functions that drives the robots to the required configurations. In order to demonstrate the proposed framework, we consider a scenario where a team of eight planar robots explore an urban environment in order to localize and rescue a subject. The results are presented in the form of a case study, which is implemented on a multi-agent robotic test-bed.
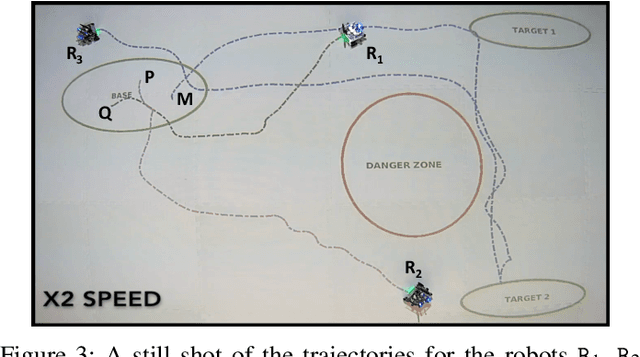
Control of Multi-Agent Systems with Finite Time Control Barrier Certificates and Temporal Logic
Aug 07, 2018
In this paper, a method to synthesize controllers using finite time convergence control barrier functions guided by linear temporal logic specifications for continuous time multi-agent dynamical systems is proposed. Finite time convergence to a desired set in the state space is guaranteed under the existence of a suitable finite time convergence control barrier function. In addition, these barrier functions also guarantee forward invariance once the system converges to the desired set. This allows us to formulate a theoretical framework which synthesizes controllers for the multi-agent system. These properties also enable us to solve the reachability problem in continuous time by formulating a theorem on the composition of multiple finite time convergence control barrier functions. This approach is more flexible than existing methods and also allows for a greater set of feasible control laws. Linear temporal logic is used to specify complex task specifications that need to be satisfied by the multi-agent system. With this solution methodology, a control law is synthesized that satisfies the given temporal logic task specification. Robotic experiments are provided which were performed on the Robotarium multi-robot testbed at Georgia Tech.