 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFluid-Antenna-Enabled Integrated Bistatic Sensing and Backscatter Communication Systems
Feb 11, 2026This paper studies a fluid-antenna-enabled integrated bistatic sensing and backscatter communication system for future networks where connectivity, power delivery, and environmental awareness are jointly supported by the same infrastructure. A multi-antenna base station (BS) with transmitting fluid antennas serves downlink users, energizes passive tags, and illuminates radar targets, while a spatially separated multi-antenna reader decodes tag backscatter and processes radar echoes to avoid the strong self-interference that would otherwise obscure weak returns at the BS. The coexistence of tags and targets, however, induces severe near--far disparities and multi-signal interference, which can be mitigated by fluid antennas through additional spatial degrees of freedom that reshape the multi-hop channels. We formulate a transmit-power minimization problem that jointly optimizes the BS information beamformers, sensing covariance matrix, reader receive beamformers, tag reflection coefficients, and fluid-antenna (FA) positions under heterogeneous quality of service constraints for communication, backscatter, and sensing, as well as energy-harvesting and FA geometry requirements. To tackle the resulting non-convex problem, we develop an alternating-optimization block-coordinate framework that solves four tractable subproblems using semidefinite relaxation, majorization--minimization, and successive convex approximation. Numerical results show consistent transmit-power savings over fixed-position antennas and zero-forcing baselines, achieving about 13.7% and 54.5% reductions, respectively.
Channel Estimation for Full-duplex Multi-tag Ambient Backscatter Communication Systems with I/Q Imbalance
Dec 14, 2025



Ambient backscatter communication (AmBC) has emerged as a highly attractive paradigm for energy-efficient communication. Full-duplex multi-tag AmBC systems provide the scalability and efficient spectrum utilization essential for next generation Internet-of-Things (IoT) networks. However, the presence of multiple tags, self-interference and hardware impairments such as inphase/quadrature (I/Q) imbalance, makes accurate channel estimation indispensable for efficient interference management. The large number of channel parameters and the presence of mirror images of each signal component necessitate careful design of the channel estimation phase to prevent performance degradation. In this work, we propose a novel three-stage training protocol and pilot-based estimation scheme that ensure signal orthogonality and successfully avoid error floors. We also propose two semi-blind estimators, one based on decision-directed (DD) criterion and the other on the expectation conditional maximization (ECM) framework. By exploiting both pilots and data symbols, these two estimators achieve higher estimation accuracy than pilot-based estimation, at the cost of additional complexity. Cramer-Rao bounds (CRBs) for both types of estimation are also derived. The pilot-based estimator and the ECM estimator approach their respective CRBs, while the DD estimator performs mid-way between them. The three proposed solutions support different use cases by offering distinct tradeoffs between performance and computational complexity.
Robust Secure ISAC: How RSMA and Active RIS Manage Eavesdropper's Spatial Uncertainty
Jul 21, 2024



Incorporating rate splitting multiple access (RSMA) into integrated sensing and communication (ISAC) presents a significant security challenge, particularly in scenarios where the location of a potential eavesdropper (Eve) is unidentified. Splitting users' messages into common and private streams exposes them to eavesdropping, with the common stream dedicated for sensing and accessible to multiple users. In response to this challenge, this paper proposes a novel approach that leverages active reconfigurable intelligent surface (RIS) aided beamforming and artificial noise (AN) to enhance the security of RSMA-enabled ISAC. Specifically, we first derive the ergodic private secrecy rate (EPSR) based on mathematical approximation of the average Eve channel gain. An optimization problem is then formulated to maximize the minimum EPSR, while satisfying the minimum required thresholds on ergodic common secrecy rate, radar sensing and RIS power budget. To address this non-convex problem, a novel optimization strategy is developed, whereby we alternatively optimize the transmit beamforming matrix for the common and private streams, rate splitting, AN, RIS reflection coefficient matrix, and radar receive beamformer. Successive convex approximation (SCA) and Majorization-Minimization (MM) are employed to convexify the beamforming and RIS sub-problems. Simulations are conducted to showcase the effectiveness of the proposed framework against established benchmarks.
Range Estimation of a Moving Target Using Ultrasound Differential Zadoff-Chu Codes
Feb 10, 2021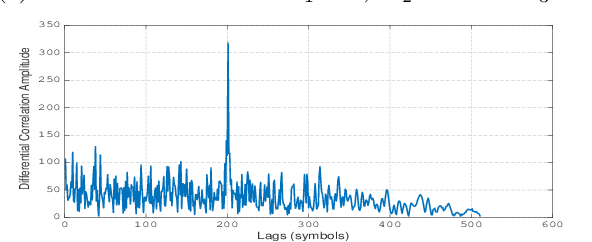
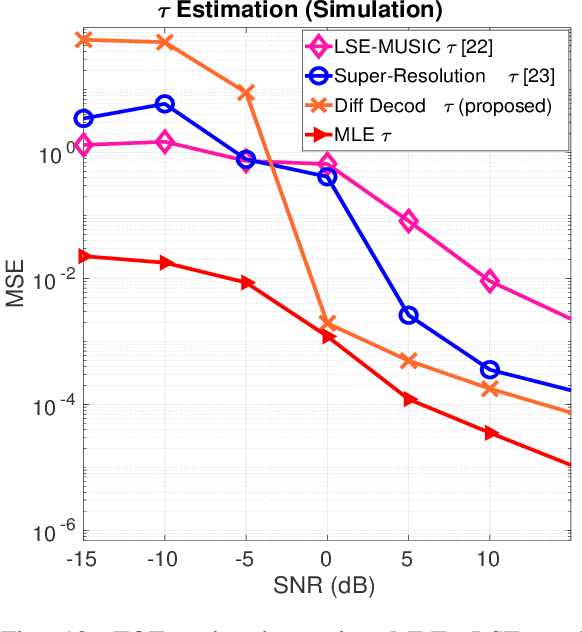
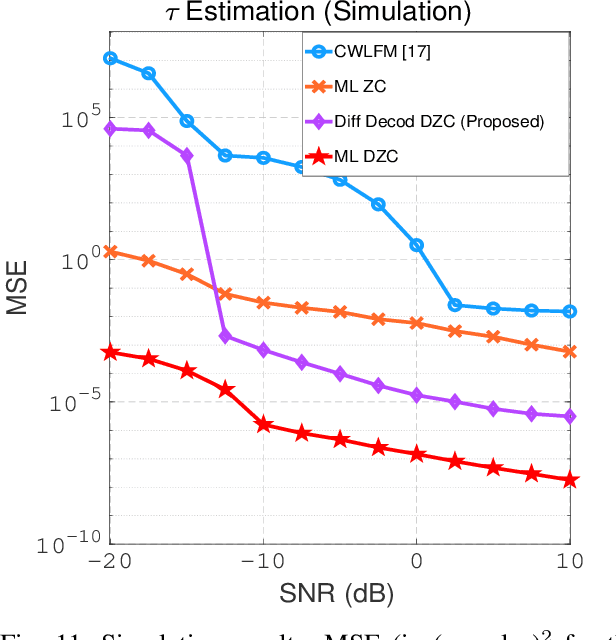
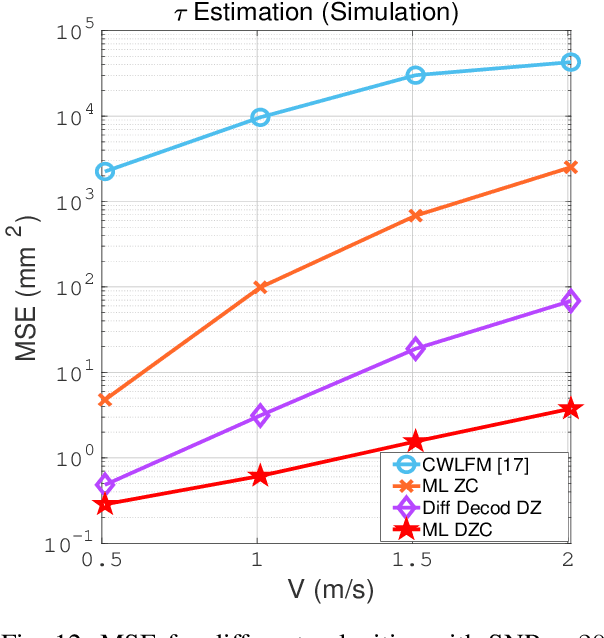
High accuracy range estimation is an essential tool required in many modern applications and technologies. However, continuous range estimation of a moving target is a challenging task, especially under Doppler effects. This paper presents a novel signal design, which we name differential Zadoff-Chu (DZC). Under Doppler effects, DZC sequences improve the performance of the maximum likelihood (ML)-based range estimation compared to its performance when using regular ZC sequences. Moreover, a reduced-complexity ranging algorithm is proposed utilizing DZC sequences and is shown to outperform the regular ZC ML-based range estimation. The proposed system is evaluated in a typical indoor environment, using low-cost ultrasound hardware. Under a low signal to noise ratio (-10 dB SNR), more than 90% of the range estimates are in less than 1.6 mm error, with a movement range from $0.2$ m to 2.2 m and a maximum velocity of 0.5 m/s. For the same movement range, the system provides range estimates with a root mean square error (RMSE) less than 0.76 mm in a high SNR scenario (10 dB), and an MSE less than 0.85 mm in a low SNR scenario (-10 dB). For a larger movement range from 1.8 m to 4.2 m with a maximum velocity of 1.91 m/s, the proposed system provides range estimates with RMSE less than 7.70 mm at 10 dB SNR.