 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadratic Forms in Gaussian Random Variables Theoretical Results and Applications
May 10, 2026This manuscript reviews theoretical results and applications related to quadratic forms in Gaussian random variables. It summarizes definitions, canonical representations, exact and approximate distributional results, numerical inversion methods, applications, and selected open problems for real and complex quadratic forms, multiforms, and ratios of quadratic forms.
Indoor Position and Attitude Tracking with SO(3) Manifold
Jan 02, 2025



Driven by technological breakthroughs, indoor tracking and localization have gained importance in various applications including the Internet of Things (IoT), robotics, and unmanned aerial vehicles (UAVs). To tackle some of the challenges associated with indoor tracking, this study explores the potential benefits of incorporating the SO(3) manifold structure of the rotation matrix. The goal is to enhance the 3D tracking performance of the extended Kalman filter (EKF) and unscented Kalman filter (UKF) of a moving target within an indoor environment. Our results demonstrate that the proposed extended Kalman filter with Riemannian (EKFRie) and unscented Kalman filter with Riemannian (UKFRie) algorithms consistently outperform the conventional EKF and UKF in terms of position and orientation accuracy. While the conventional EKF and UKF achieved root mean square error (RMSE) of 0.36m and 0.43m, respectively, for a long stair path, the proposed EKFRie and UKFRie algorithms achieved a lower RMSE of 0.21m and 0.10m. Our results show also the outperforming of the proposed algorithms over the EKF and UKF algorithms with the Isosceles triangle manifold. While the latter achieved RMSE of 7.26cm and 7.27cm, respectively, our proposed algorithms achieved RMSE of 6.73cm and 6.16cm. These results demonstrate the enhanced performance of the proposed algorithms.
Kalman Filtering for Precise Indoor Position and Orientation Estimation Using IMU and Acoustics on Riemannian Manifolds
Sep 02, 2024



Indoor tracking and pose estimation, i.e., determining the position and orientation of a moving target, are increasingly important due to their numerous applications. While Inertial Navigation Systems (INS) provide high update rates, their positioning errors can accumulate rapidly over time. To mitigate this, it is common to integrate INS with complementary systems to correct drift and improve accuracy. This paper presents a novel approach that combines INS with an acoustic Riemannian-based localization system to enhance indoor positioning and orientation tracking. The proposed method employs both the Extended Kalman Filter (EKF) and the Unscented Kalman Filter (UKF) for fusing data from the two systems. The Riemannian-based localization system delivers high-accuracy estimates of the target's position and orientation, which are then used to correct the INS data. A new projection algorithm is introduced to map the EKF or UKF output onto the Riemannian manifold, further improving estimation accuracy. Our results show that the proposed methods significantly outperform benchmark algorithms in both position and orientation estimation. The effectiveness of the proposed methods was evaluated through extensive numerical simulations and testing using our in-house experimental setup. These evaluations confirm the superior performance of our approach in practical scenarios.
Instantaneous GNSS Ambiguity Resolution and Attitude Determination via Riemannian Manifold Optimization
May 20, 2022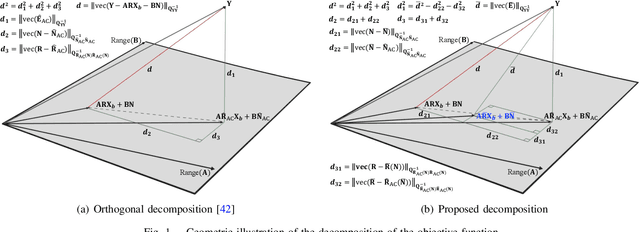
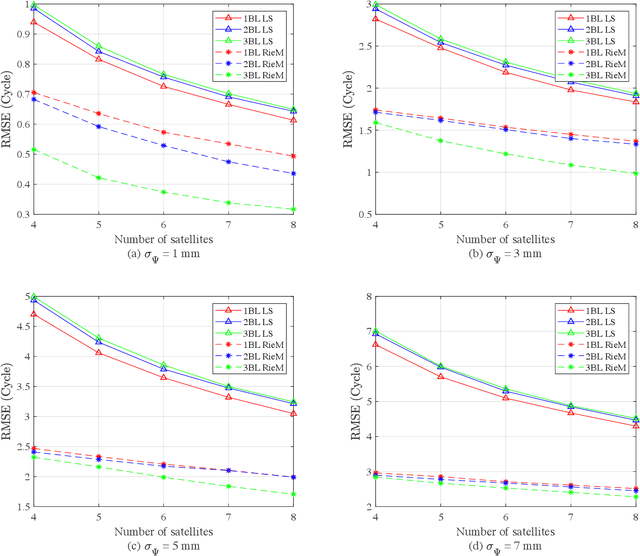
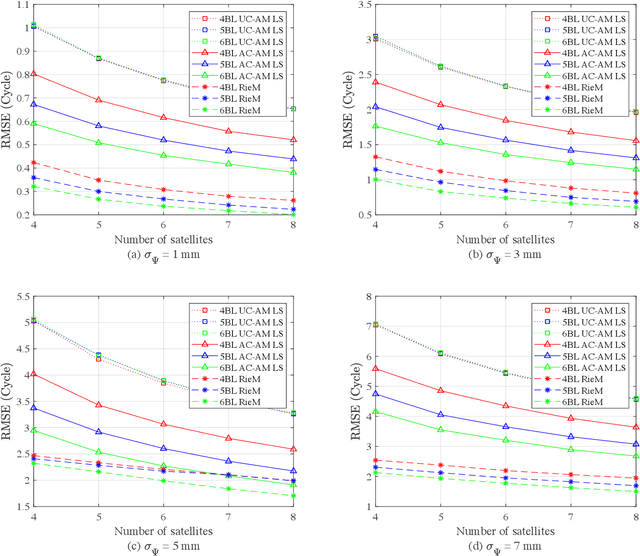
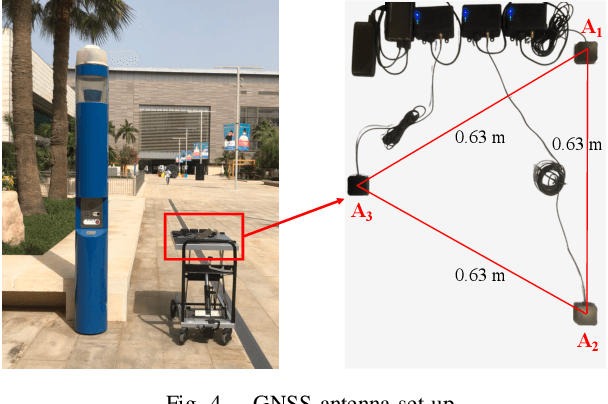
We present an ambiguity resolution method for Global Navigation Satellite System (GNSS)-based attitude determination. A GNSS attitude model with nonlinear constraints is used to rigorously incorporate a priori information. Given the characteristics of the employed nonlinear constraints, we formulate GNSS attitude determination as an optimization problem on a manifold. Then, Riemannian manifold optimization algorithms are utilized to aid ambiguity resolution based on a proposed decomposition of the objective function. The application of manifold geometry enables high-quality float solutions that are critical to reinforcing search-based integer ambiguity resolution in terms of efficiency, availability, and reliability. The proposed approach is characterized by a low computational complexity and a high probability of resolving the ambiguities correctly. The performance of the proposed ambiguity resolution method is tested through a series of simulations and real experiments. Comparisons with the principal benchmarks indicate the superiority of the proposed method as reflected by the high ambiguity resolution success rates.
Manifold Optimization for High Accuracy Spatial Location Estimation Using Ultrasound Waves
Mar 28, 2021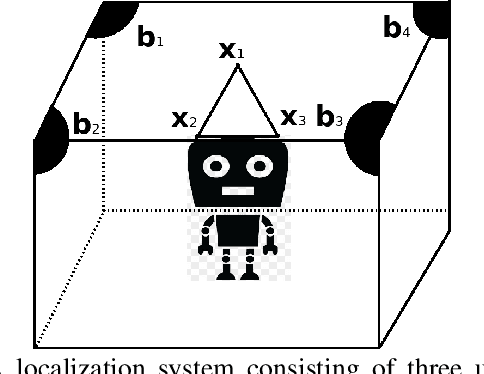
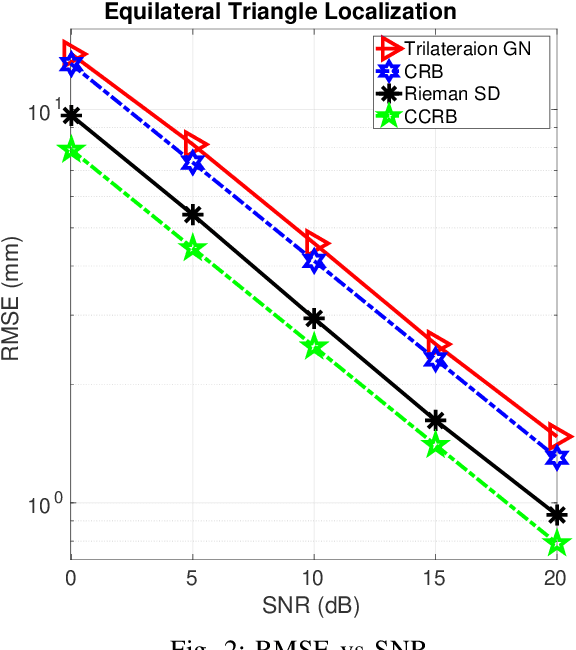
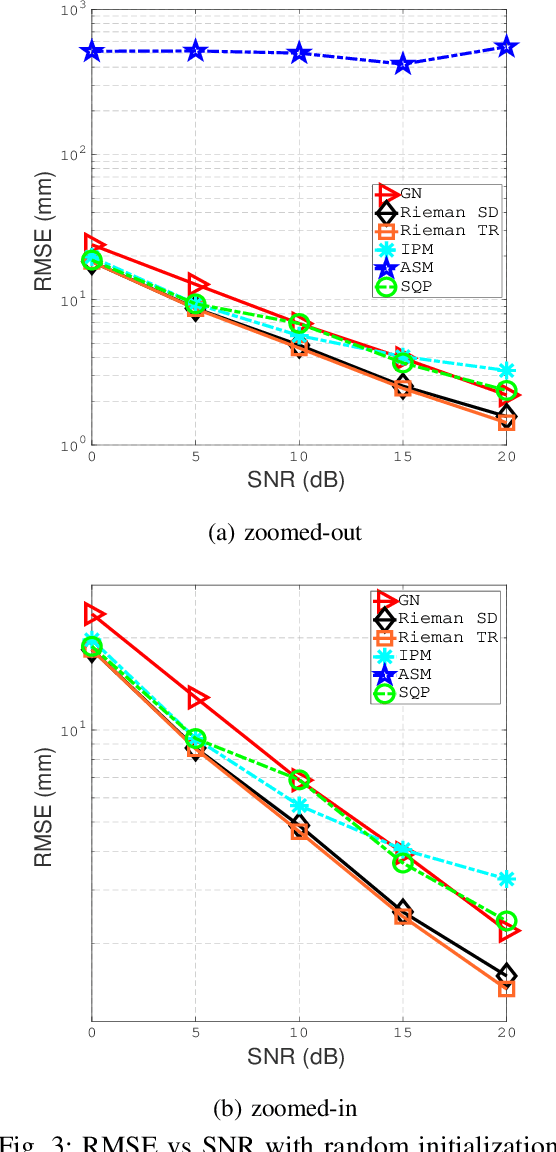
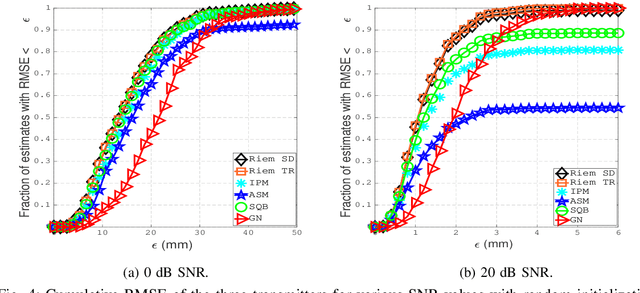
This paper designs a high accuracy spatial location estimation method using ultrasound waves by exploiting the fixed geometry of the transmitters. Assuming an equilateral triangle antenna configuration, where three antennas are placed as the vertices of an equilateral triangle, the spatial location problem can be formulated as a non-convex optimization problem whose interior is shown to admit a Riemannian manifold structure. The investigation of the geometry of the newly introduced manifold, i.e. the manifold of all equilateral triangles in R^3, allows the design of highly efficient optimization algorithms. Simulation results are presented to compare the performance of the proposed approach against popular methods from the literature. The results suggest that the proposed Riemannian-based methods outperform the state-of-the-art methods. Furthermore, the proposed Riemannian methods require much smaller computation time as compared with popular generic non-convex approaches.
Range Estimation of a Moving Target Using Ultrasound Differential Zadoff-Chu Codes
Feb 10, 2021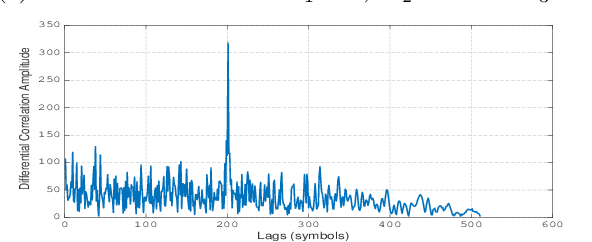
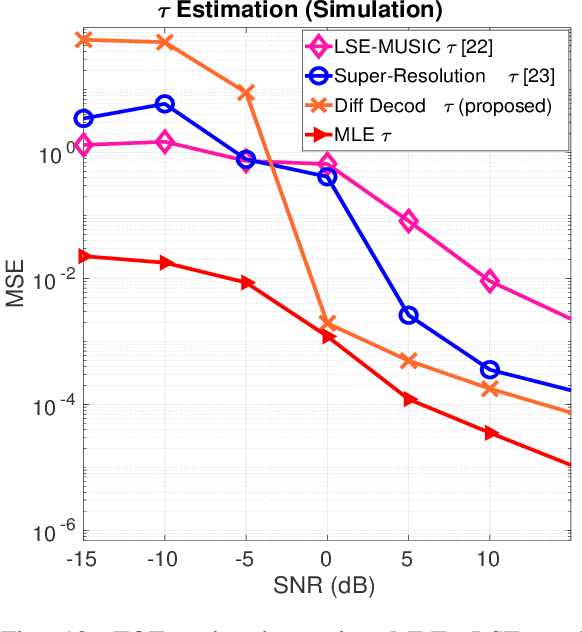
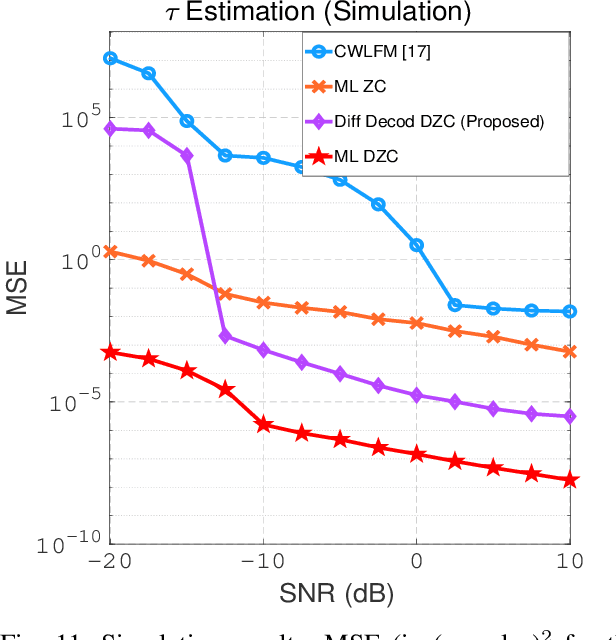
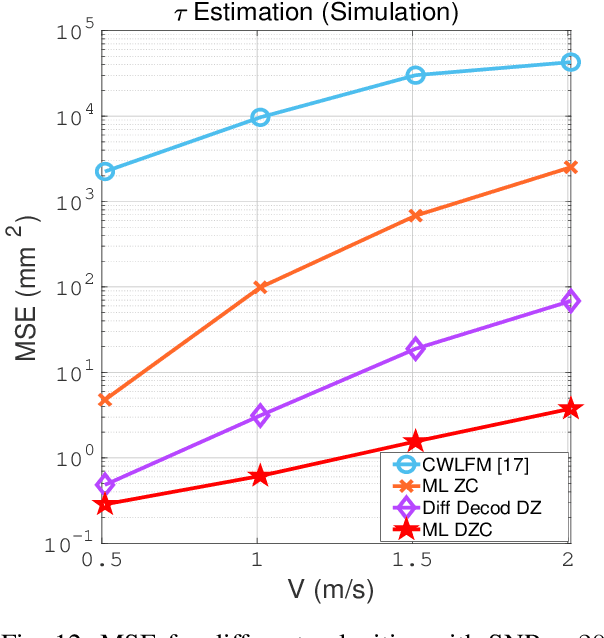
High accuracy range estimation is an essential tool required in many modern applications and technologies. However, continuous range estimation of a moving target is a challenging task, especially under Doppler effects. This paper presents a novel signal design, which we name differential Zadoff-Chu (DZC). Under Doppler effects, DZC sequences improve the performance of the maximum likelihood (ML)-based range estimation compared to its performance when using regular ZC sequences. Moreover, a reduced-complexity ranging algorithm is proposed utilizing DZC sequences and is shown to outperform the regular ZC ML-based range estimation. The proposed system is evaluated in a typical indoor environment, using low-cost ultrasound hardware. Under a low signal to noise ratio (-10 dB SNR), more than 90% of the range estimates are in less than 1.6 mm error, with a movement range from $0.2$ m to 2.2 m and a maximum velocity of 0.5 m/s. For the same movement range, the system provides range estimates with a root mean square error (RMSE) less than 0.76 mm in a high SNR scenario (10 dB), and an MSE less than 0.85 mm in a low SNR scenario (-10 dB). For a larger movement range from 1.8 m to 4.2 m with a maximum velocity of 1.91 m/s, the proposed system provides range estimates with RMSE less than 7.70 mm at 10 dB SNR.