 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeasRoBallet: Closing the Sim2Real Gap via Friction-Aware Reinforcement Learning for Underactuated Spherical Dynamics
Apr 27, 2026We introduce asRoBallet, to the best of our knowledge, the first successful deployment of reinforcement learning (RL) on a humanoid ballbot hardware. Historically, ballbots have served as a canonical benchmark for underactuated and nonholonomic control, which are characterized by a reality gap in complex friction models for wheel-sphere-ground interactions. While current literature demonstrates successful handling of 3D balancing with LQR and MPC, transitioning to actual hardware for a humanoid ballbot using RL is currently hindered by critical gaps in contact modeling, actuator latency & jitter, and safe hardware exploration, and safe hardware exploration. This study proposes a high-fidelity MuJoCo simulation that explicitly models the discrete roller mechanics of ETH-type omni-wheels, thereby capturing parasitic vibrations and contact discontinuities that are previously ignored. We also developed a Friction-Aware Reinforcement Learning framework that achieves zero-shot Sim2Real transfer by mastering the coupled rolling, lateral, and torsional friction channels at the wheel-sphere and sphere-ground interfaces. We designed asRoBallet through subtractive reconfiguration, repurposing key components from an overconstrained quadruped and integrating them into a newly designed structural frame to achieve a robust research platform at low cost. We also developed a generalized iOS ecosystem that transforms consumer electronics into a low-latency interface, enabling a single operator to orchestrate expressive humanoid maneuvers via intuitive natural motion.
Robotic Cane as a Soft SuperLimb for Elderly Sit-to-Stand Assistance
Feb 29, 2020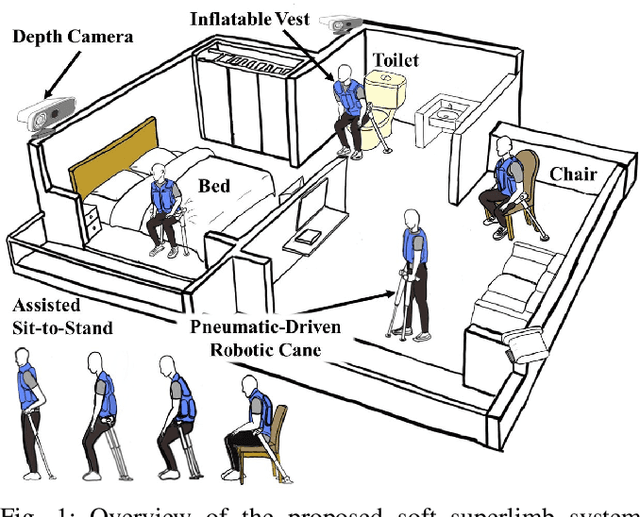
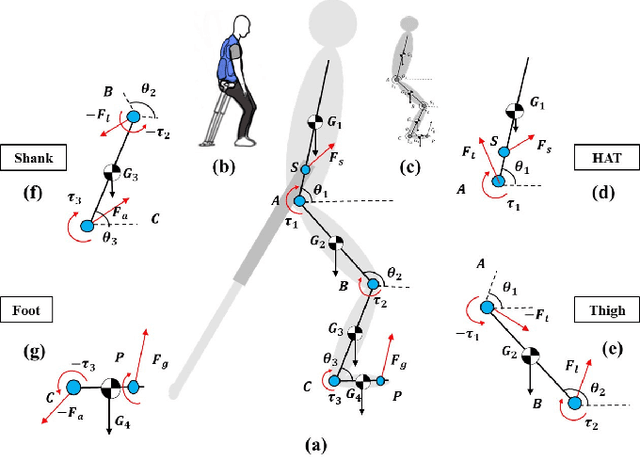
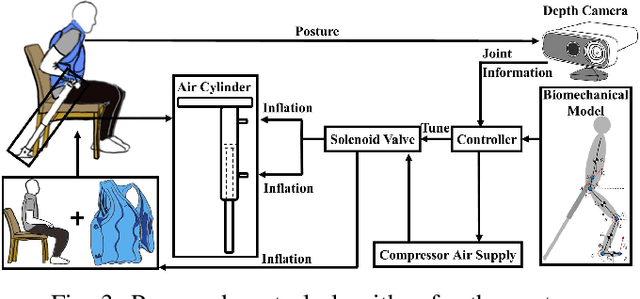
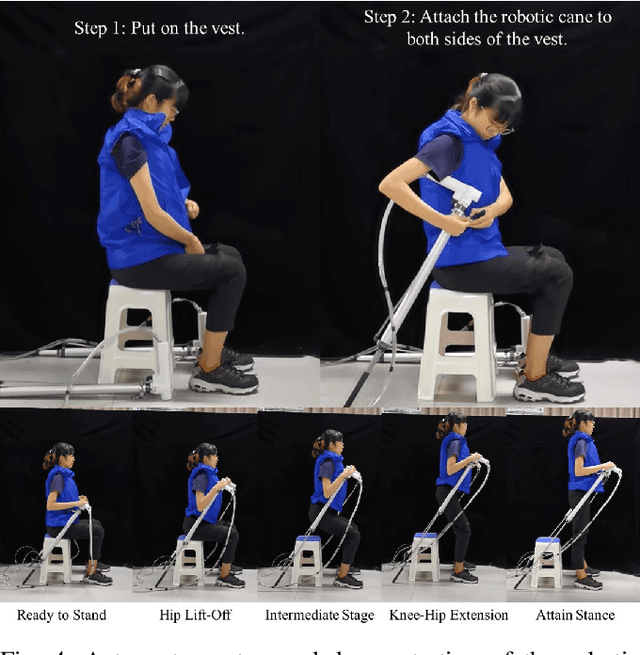
Many researchers have identified robotics as a potential solution to the aging population faced by many developed and developing countries. If so, how should we address the cognitive acceptance and ambient control of elderly assistive robots through design? In this paper, we proposed an explorative design of an ambient SuperLimb (Supernumerary Robotic Limb) system that involves a pneumatically-driven robotic cane for at-home motion assistance, an inflatable vest for compliant human-robot interaction, and a depth sensor for ambient intention detection. The proposed system aims at providing active assistance during the sit-to-stand transition for at-home usage by the elderly at the bedside, in the chair, and on the toilet. We proposed a modified biomechanical model with a linear cane robot for closed-loop control implementation. We validated the design feasibility of the proposed ambient SuperLimb system including the biomechanical model, our result showed the advantages in reducing lower limb efforts and elderly fall risks, yet the detection accuracy using depth sensing and adjustments on the model still require further research in the future. Nevertheless, we summarized empirical guidelines to support the ambient design of elderly-assistive SuperLimb systems for lower limb functional augmentation.