 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShields to Guarantee Probabilistic Safety in MDPs
May 11, 2026Shielding is a prominent model-based technique to ensure safety of autonomous agents. Classical shielding aims to ensure that nothing bad ever happens and comes with strong guarantees about safety and maximal permissiveness. However, shielding systems for probabilistic safety, where something bad is allowed to happen with an acceptable probability, has proven to be more intricate. This paper presents a formal framework that conservatively extends classical shields to probabilistic safety. In this framework, we (i) demonstrate the impossibility of preserving the strong guarantees on safety and permissiveness, (ii) provide natural shields with weaker guarantees, and (iii) introduce offline and online shield constructions ensuring strong safety guarantees. The empirical evaluation highlights the practical advantages of the new shields, as well as their computational feasibility.
Finite-State Controllers for (Hidden-Model) POMDPs using Deep Reinforcement Learning
Feb 09, 2026Solving partially observable Markov decision processes (POMDPs) requires computing policies under imperfect state information. Despite recent advances, the scalability of existing POMDP solvers remains limited. Moreover, many settings require a policy that is robust across multiple POMDPs, further aggravating the scalability issue. We propose the Lexpop framework for POMDP solving. Lexpop (1) employs deep reinforcement learning to train a neural policy, represented by a recurrent neural network, and (2) constructs a finite-state controller mimicking the neural policy through efficient extraction methods. Crucially, unlike neural policies, such controllers can be formally evaluated, providing performance guarantees. We extend Lexpop to compute robust policies for hidden-model POMDPs (HM-POMDPs), which describe finite sets of POMDPs. We associate every extracted controller with its worst-case POMDP. Using a set of such POMDPs, we iteratively train a robust neural policy and consequently extract a robust controller. Our experiments show that on problems with large state spaces, Lexpop outperforms state-of-the-art solvers for POMDPs as well as HM-POMDPs.
Constrained and Robust Policy Synthesis with Satisfiability-Modulo-Probabilistic-Model-Checking
Nov 15, 2025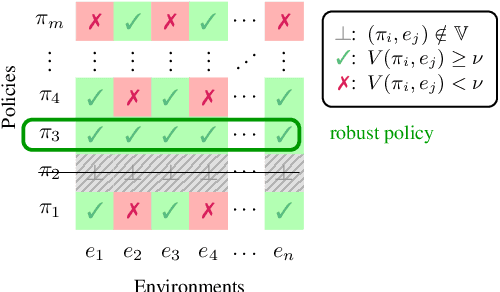
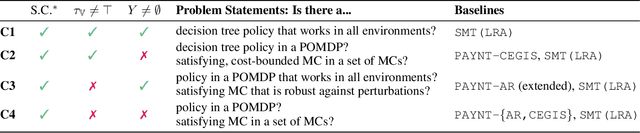
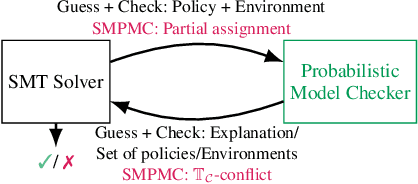

The ability to compute reward-optimal policies for given and known finite Markov decision processes (MDPs) underpins a variety of applications across planning, controller synthesis, and verification. However, we often want policies (1) to be robust, i.e., they perform well on perturbations of the MDP and (2) to satisfy additional structural constraints regarding, e.g., their representation or implementation cost. Computing such robust and constrained policies is indeed computationally more challenging. This paper contributes the first approach to effectively compute robust policies subject to arbitrary structural constraints using a flexible and efficient framework. We achieve flexibility by allowing to express our constraints in a first-order theory over a set of MDPs, while the root for our efficiency lies in the tight integration of satisfiability solvers to handle the combinatorial nature of the problem and probabilistic model checking algorithms to handle the analysis of MDPs. Experiments on a few hundred benchmarks demonstrate the feasibility for constrained and robust policy synthesis and the competitiveness with state-of-the-art methods for various fragments of the problem.
\textsc{rfPG}: Robust Finite-Memory Policy Gradients for Hidden-Model POMDPs
May 14, 2025Partially observable Markov decision processes (POMDPs) model specific environments in sequential decision-making under uncertainty. Critically, optimal policies for POMDPs may not be robust against perturbations in the environment. Hidden-model POMDPs (HM-POMDPs) capture sets of different environment models, that is, POMDPs with a shared action and observation space. The intuition is that the true model is hidden among a set of potential models, and it is unknown which model will be the environment at execution time. A policy is robust for a given HM-POMDP if it achieves sufficient performance for each of its POMDPs. We compute such robust policies by combining two orthogonal techniques: (1) a deductive formal verification technique that supports tractable robust policy evaluation by computing a worst-case POMDP within the HM-POMDP and (2) subgradient ascent to optimize the candidate policy for a worst-case POMDP. The empirical evaluation shows that, compared to various baselines, our approach (1) produces policies that are more robust and generalize better to unseen POMDPs and (2) scales to HM-POMDPs that consist of over a hundred thousand environments.
Decentralized Planning Using Probabilistic Hyperproperties
Feb 19, 2025


Multi-agent planning under stochastic dynamics is usually formalised using decentralized (partially observable) Markov decision processes ( MDPs) and reachability or expected reward specifications. In this paper, we propose a different approach: we use an MDP describing how a single agent operates in an environment and probabilistic hyperproperties to capture desired temporal objectives for a set of decentralized agents operating in the environment. We extend existing approaches for model checking probabilistic hyperproperties to handle temporal formulae relating paths of different agents, thus requiring the self-composition between multiple MDPs. Using several case studies, we demonstrate that our approach provides a flexible and expressive framework to broaden the specification capabilities with respect to existing planning techniques. Additionally, we establish a close connection between a subclass of probabilistic hyperproperties and planning for a particular type of Dec-MDPs, for both of which we show undecidability. This lays the ground for the use of existing decentralized planning tools in the field of probabilistic hyperproperty verification.
Counterexample-Driven Synthesis for Probabilistic Program Sketches
Apr 28, 2019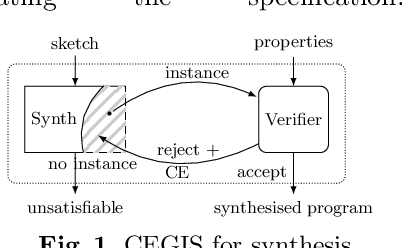

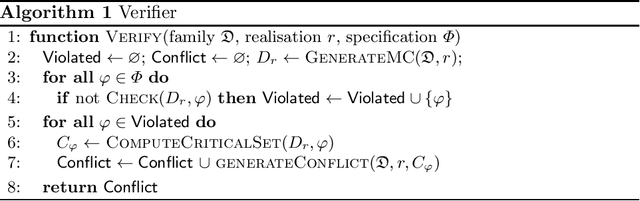
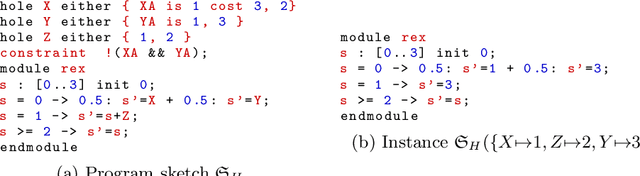
Probabilistic programs are key to deal with uncertainty in e.g. controller synthesis. They are typically small but intricate. Their development is complex and error prone requiring quantitative reasoning over a myriad of alternative designs. To mitigate this complexity, we adopt counterexample-guided inductive synthesis (CEGIS) to automatically synthesise finite-state probabilistic programs. Our approach leverages efficient model checking, modern SMT solving, and counterexample generation at program level. Experiments on practically relevant case studies show that design spaces with millions of candidate designs can be fully explored using a few thousand verification queries.