 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Dexterity in Robotic Manipulation via Hierarchical Contact Exploration
Jul 01, 2023



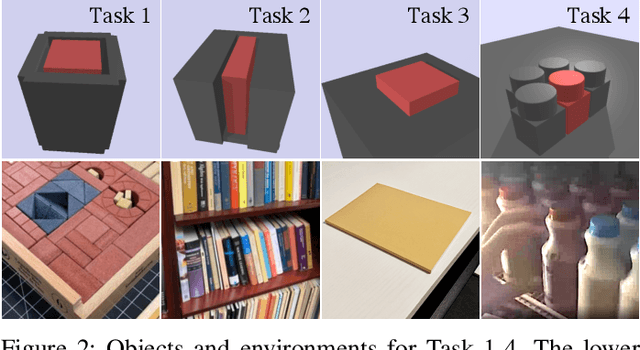
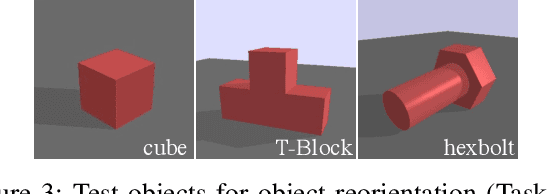
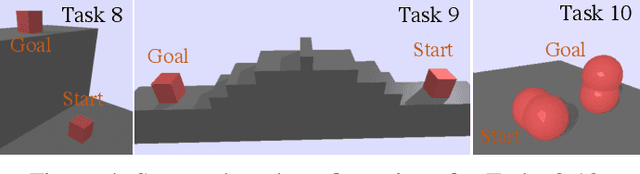
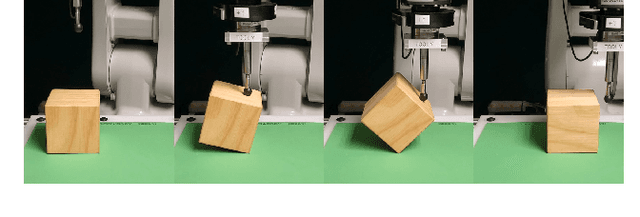
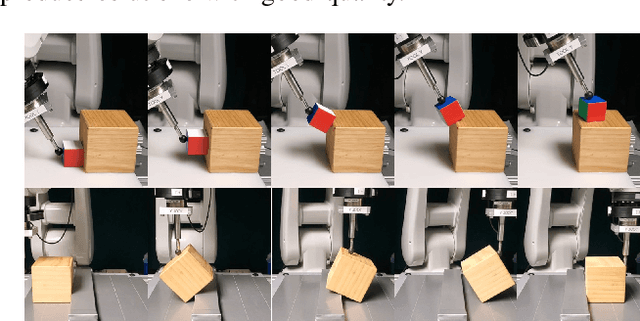
We present a hierarchical planning framework for dexterous robotic manipulation (HiDex). This framework exploits in-hand and extrinsic dexterity by actively exploring contacts. It generates rigid-body motions and complex contact sequences. Our framework is based on Monte-Carlo Tree Search (MCTS) and has three levels: 1) planning object motions and environment contact modes; 2) planning robot contacts; 3) path evaluation and control optimization that passes the rewards to the upper levels. This framework offers two main advantages. First, it allows efficient global reasoning over high-dimensional complex space created by contacts. It solves a diverse set of manipulation tasks that require dexterity, both intrinsic (using the fingers) and extrinsic (also using the environment), mostly in seconds. Second, our framework allows the incorporation of expert knowledge and customizable setups in task mechanics and models. It requires minor modifications to accommodate different scenarios and robots. Hence, it could provide a flexible and generalizable solution for various manipulation tasks. As examples, we analyze the results on 7 hand configurations and 15 scenarios. We demonstrate 8 of them on two robot platforms.
Reacting to Contact: Transparency and Collision Reflex in Actuation
Dec 07, 2022



In unstructured environments, robots run the risk of unexpected collisions. How well they react to these events is determined by how transparent they are to collisions. Transparency is affected by structural properties as well as sensing and control architectures. In this paper, we propose the collision reflex metric as a way to formally quantify transparency. It is defined as the total impulse transferred in collision, which determines the collision mitigation capabilities of a closed-loop robotic system taking into account structure, sensing, and control. We analyze the effect of motor scaling, stiffness, and configuration on the collision reflex of a system using an analytical model. Physical experiments using the move-until-touch behavior are conducted to compare the collision reflex of direct-drive and quasi-direct-drive actuators and robotic hands (Schunk WSG-50 and Dexterous DDHand.) For transparent systems, we see a counter-intuitive trend: the impulse may be lower at higher pre-impact velocities.
Contact Mode Guided Motion Planning for Dexterous Manipulation
May 30, 2021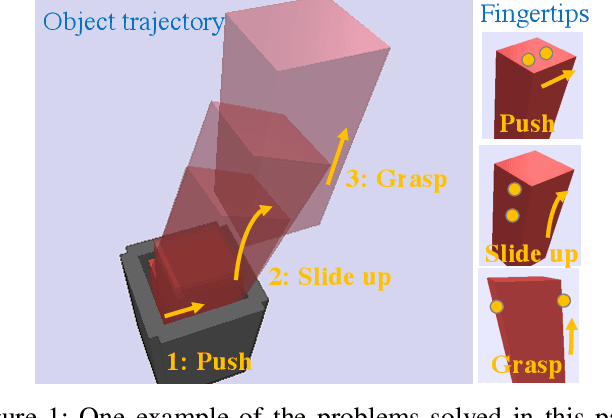
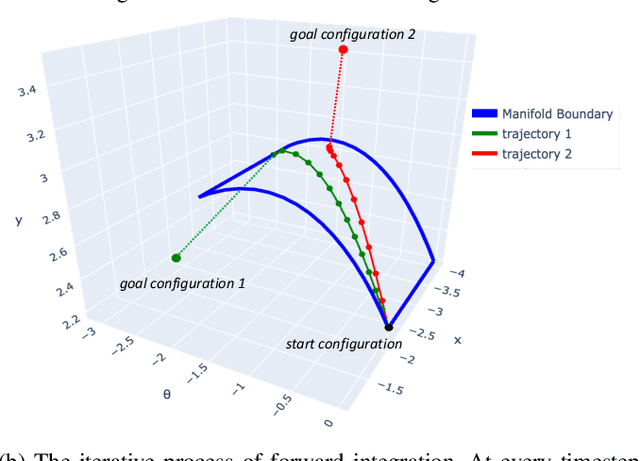
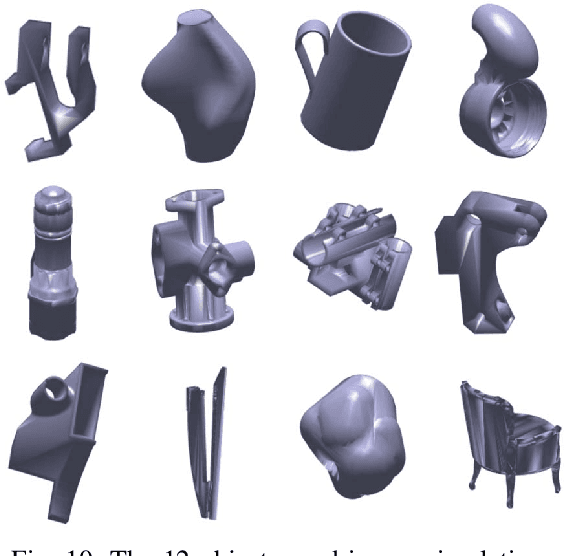
Within the field of robotic manipulation, a central goal is to replicate the human ability to manipulate any object in any situation using a sequence of manipulation primitives such as grasping, pushing, inserting, sliding, etc. Conceptually, each manipulation primitive restricts the object and robot to move on a lower-dimensional manifold defined by the primitive's dynamic equations of motion. Likewise, a manipulation sequence represents a dynamically feasible trajectory that traverses multiple manifolds. To manipulate any object in any situation, robotic systems must include the ability to automatically synthesize manipulation primitives (manifolds) and sequence those primitives into a coherent plan (find a path across the manifolds). This paper investigates a principled approach for solving dexterous manipulation planning. This approach is based on rapidly-exploring random trees which use contact modes to guide tree expansion along primitive manifolds. This paper extends this algorithm from 2D domains to 3D domains. We validated our algorithm on a large collection of simulated 3D manipulation tasks. These tasks required our algorithm to sequence between 6-42 manipulation primitives (i.e.\! distinct contact modes). We believe this work represents an important step towards robotic manipulation capabilities which generalize across objects and environments.
An Efficient Closed-Form Method for Optimal Hybrid Force-Velocity Control
Nov 10, 2020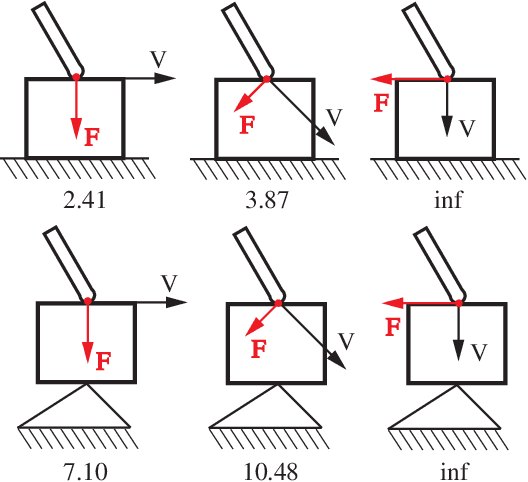
This paper derives a closed-form method for computing hybrid force-velocity control. The key idea is to maximize the kinematic conditioning of the mechanical system, which includes a robot, free objects, a rigid environment and contact constraints. The method is complete, in that it always produces an optimal/near optimal solution when a solution exists. It is efficient, since it is in closed form, avoiding the iterative search of previous work. We test the method on 78,000 randomly generated test cases. The method outperforms our previous search-based technique by being from 7 to 40 times faster, while consistently producing better solutions in the sense of robustness to kinematic singularity. We also test the method in several representative manipulation experiments.
Contact Mode Guided Sampling-Based Planning for Quasistatic Dexterous Manipulation in 2D
Nov 03, 2020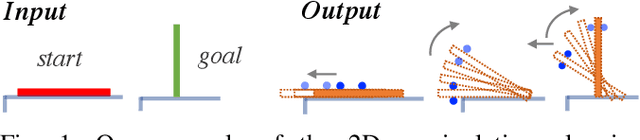


The discontinuities and multi-modality introduced by contacts make manipulation planning challenging. Many previous works avoid this problem by pre-designing a set of high-level motion primitives like grasping and pushing. However, such motion primitives are often not adequate to describe dexterous manipulation motions. In this work, we propose a method for automatic dexterous manipulation planning at a more primitive level. The key idea is to use contact modes to guide the search in a sampling-based planning framework. Our method can automatically generate contact transitions and motion trajectories under the quasistatic assumption. In the experiments, this method sometimes generates motions that are often pre-designed as motion primitives, as well as dexterous motions that are more task-specific.
Manipulation with Shared Grasping
Jun 04, 2020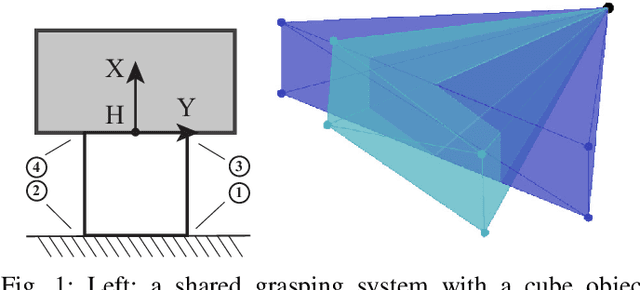
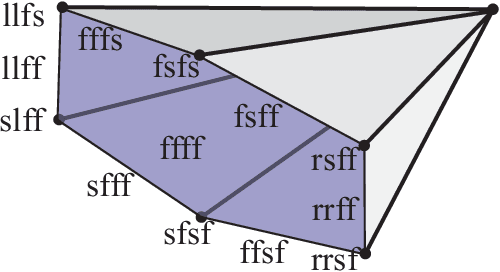
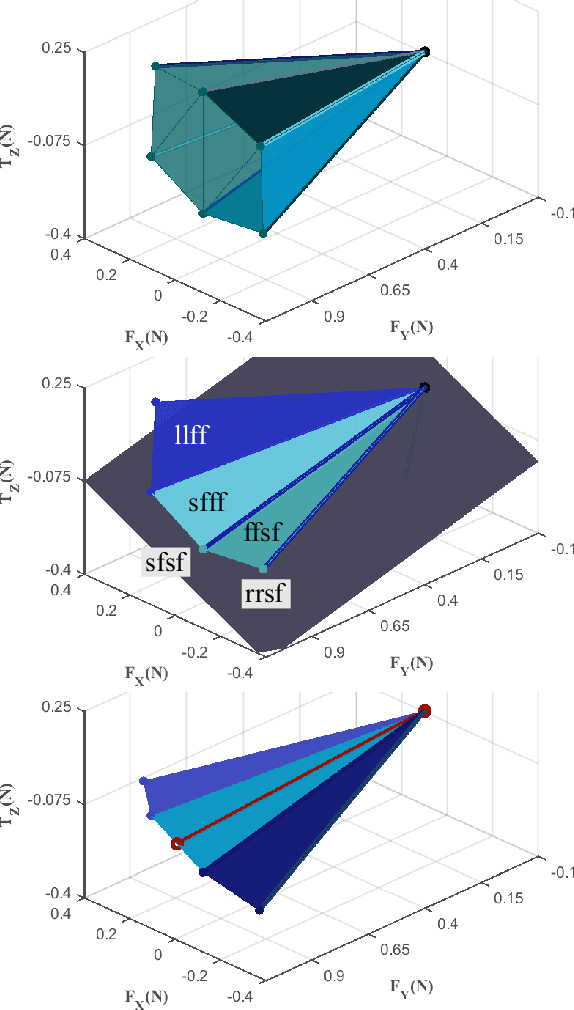
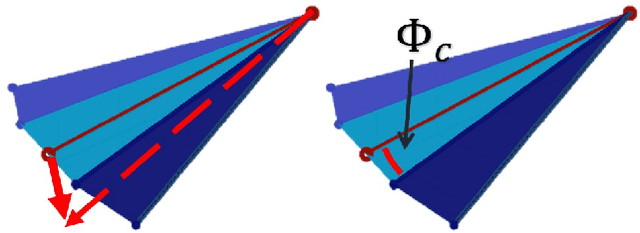
A shared grasp is a grasp formed by contacts between the manipulated object and both the robot hand and the environment. By trading off hand contacts for environmental contacts, a shared grasp requires fewer contacts with the hand, and enables manipulation even when a full grasp is not possible. Previous research has used shared grasps for non-prehensile manipulation such as pivoting and tumbling. This paper treats the problem more generally, with methods to select the best shared grasp and robot actions for a desired object motion. The central issue is to evaluate the feasible contact modes: for each contact, whether that contact will remain active, and whether slip will occur. Robustness is important. When a contact mode fails, e.g., when a contact is lost, or when unintentional slip occurs, the operation will fail, and in some cases damage may occur. In this work, we enumerate all feasible contact modes, calculate corresponding controls, and select the most robust candidate. We can also optimize the contact geometry for robustness. This paper employs quasi-static analysis of planar rigid bodies with Coulomb friction to derive the algorithms and controls. Finally, we demonstrate the robustness of shared grasping and the use of our methods in representative experiments and examples. The video can be found at https://youtu.be/tyNhJvRYZNk
Reorienting Objects in 3D Space Using Pivoting
Dec 05, 2019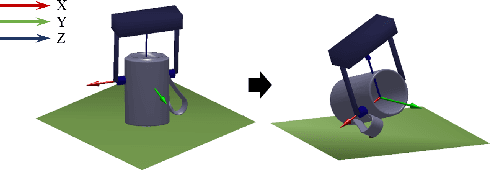
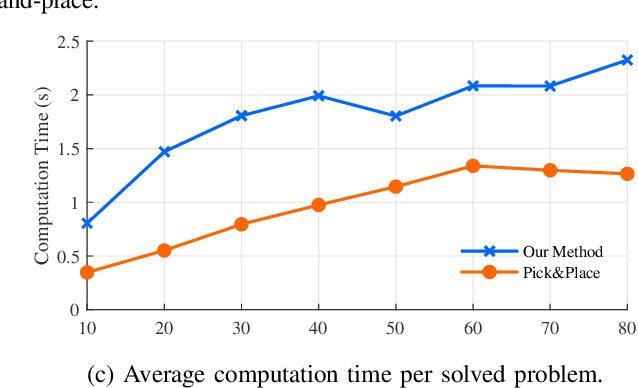
We consider the problem of reorienting a rigid object with arbitrary known shape on a table using a two-finger pinch gripper. Reorienting problem is challenging because of its non-smoothness and high dimensionality. In this work, we focus on solving reorienting using pivoting, in which we allow the grasped object to rotate between fingers. Pivoting decouples the gripper rotation from the object motion, making it possible to reorient an object under strict robot workspace constraints. We provide detailed mechanical analysis to the 3D pivoting motion on a table, which leads to simple geometric conditions for its stability. To solve reorienting problems, we introduce two motion primitives: pivot-on-support and roll-on-support, and provide an efficient hierarchical motion planning algorithm with the two motion primitives to solve for the gripper motions that reorient an object between arbitrary poses. To handle the uncertainties in modeling and perception, we make conservative plans that work in the worst case, and propose a robust control strategy for executing the motion plan. Finally we discuss the mechanical requirements on the robot and provide a "two-phase" gripper design to implement both pivoting grasp and firm grasp. We demonstrate the effectiveness of our method in simulations and multiple experiments. Our algorithm can solve more reorienting problems with fewer making and breaking contacts, when compared to traditional pick-and-place based methods.
Robust Execution of Contact-Rich Motion Plans by Hybrid Force-Velocity Control
Mar 07, 2019
In hybrid force-velocity control, the robot can use velocity control in some directions to follow a trajectory, while performing force control in other directions to maintain contacts with the environment regardless of positional errors. We call this way of executing a trajectory hybrid servoing. We propose an algorithm to compute hybrid force-velocity control actions for hybrid servoing. We quantify the robustness of a control action and make trade-offs between different requirements by formulating the control synthesis as optimization problems. Our method can efficiently compute the dimensions, directions and magnitudes of force and velocity controls. We demonstrated by experiments the effectiveness of our method in several contact-rich manipulation tasks. Link to the video: https://youtu.be/KtSNmvwOenM.
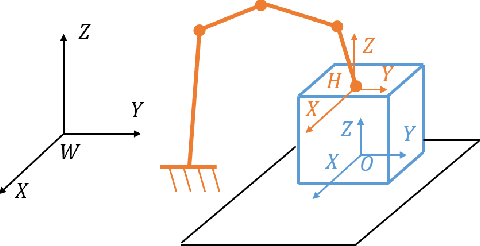
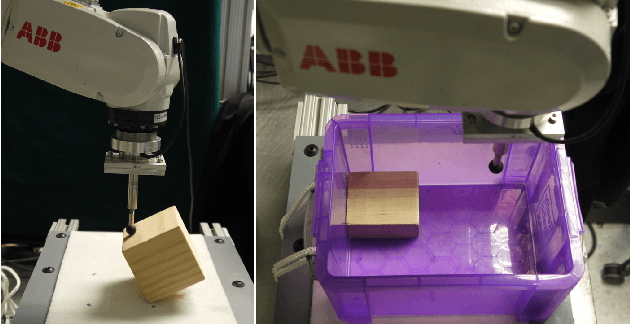
Sensorless Pose Determination using Randomized Action Sequences
Dec 04, 2018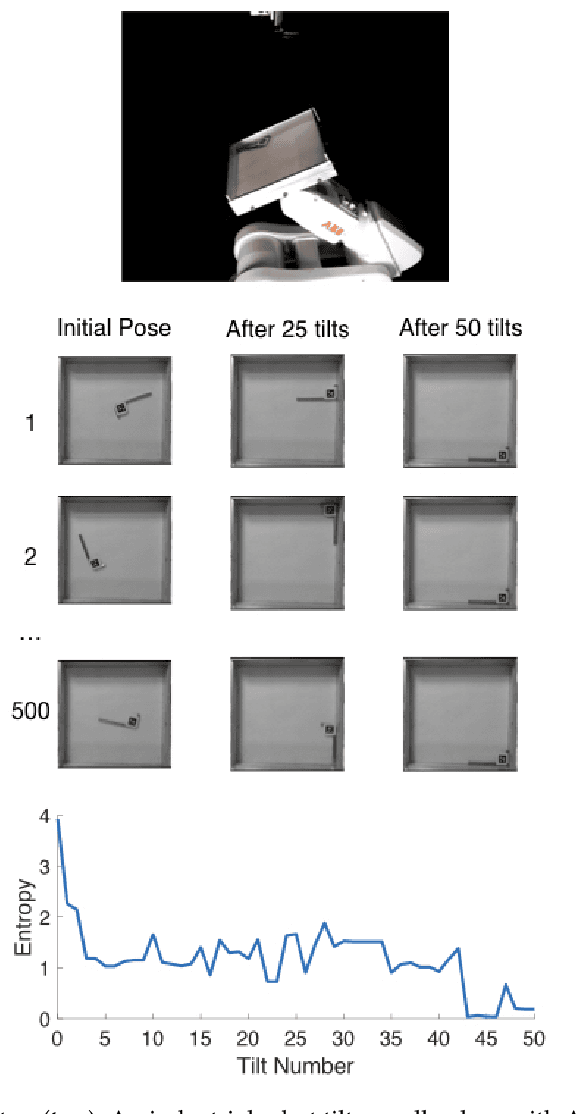
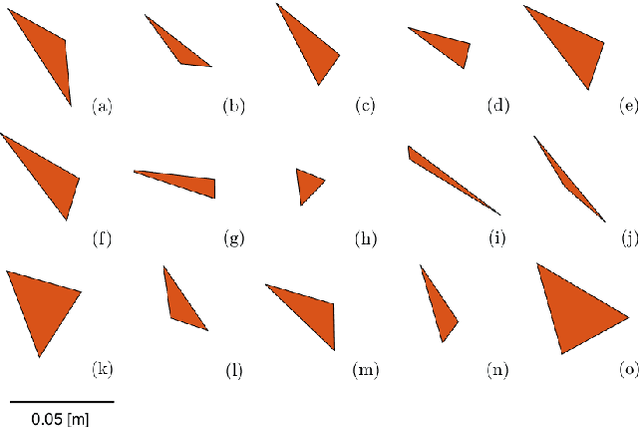
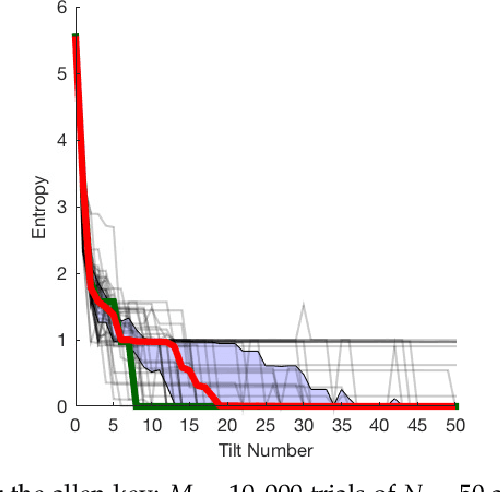
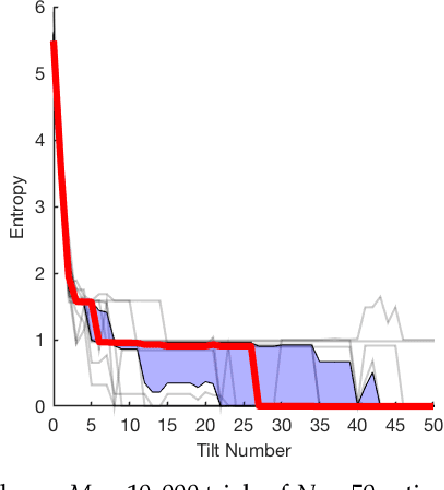
This paper is a study of 2D manipulation without sensing and planning, by exploring the effects of unplanned randomized action sequences on 2D object pose uncertainty. Our approach follows the work of Erdmann and Mason's sensorless reorienting of an object into a completely determined pose, regardless of its initial pose. While Erdmann and Mason proposed a method using Newtonian mechanics, this paper shows that under some circumstances, a long enough sequence of random actions will also converge toward a determined final pose of the object. This is verified through several simulation and real robot experiments where randomized action sequences are shown to reduce entropy of the object pose distribution. The effects of varying object shapes, action sequences, and surface friction are also explored.
Unsupervised Learning for Nonlinear PieceWise Smooth Hybrid Systems
Oct 02, 2017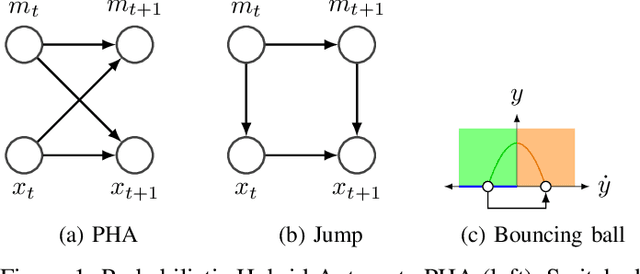
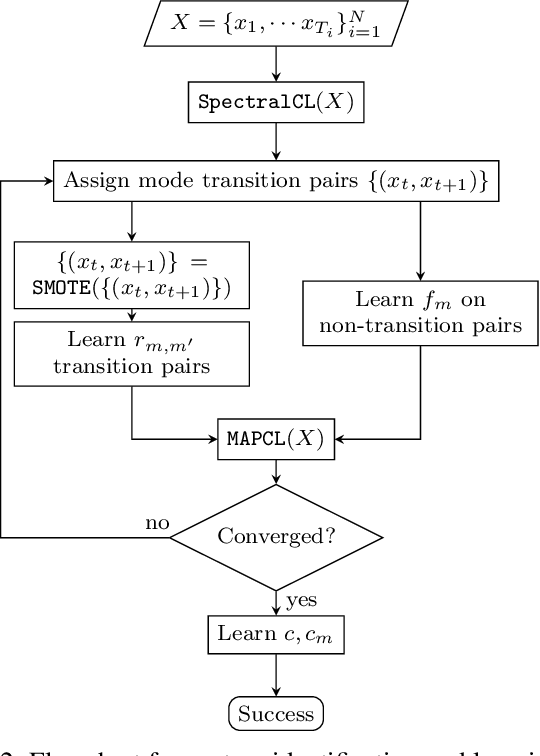
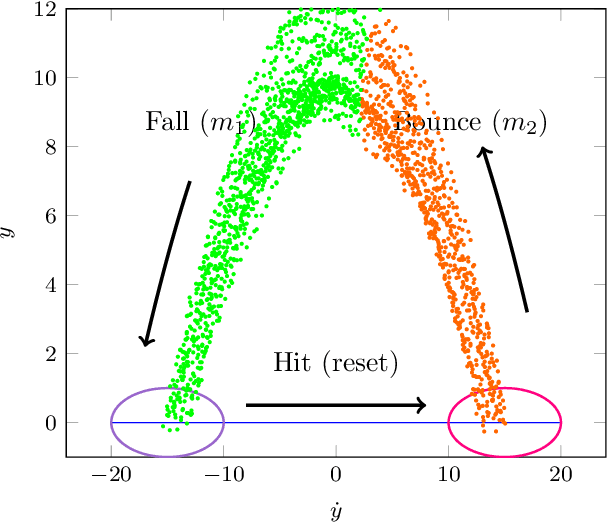
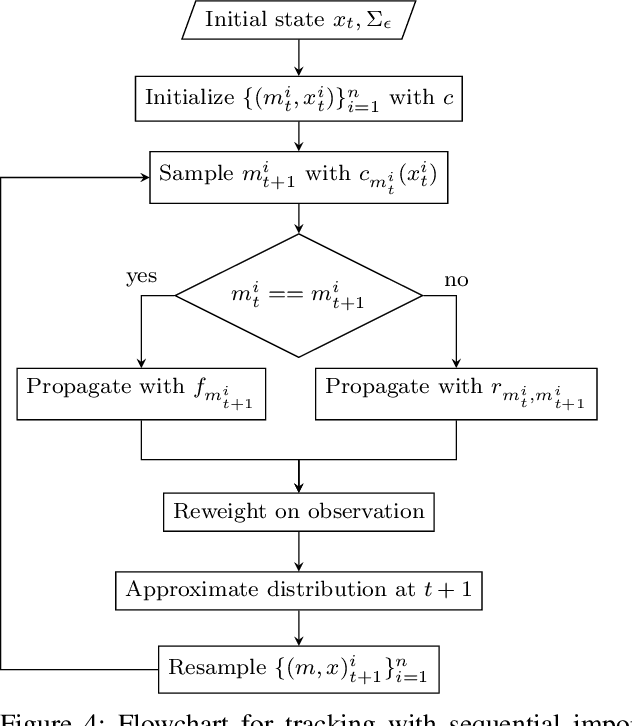
This paper introduces a novel system identification and tracking method for PieceWise Smooth (PWS) nonlinear stochastic hybrid systems. We are able to correctly identify and track challenging problems with diverse dynamics and low dimensional transitions. We exploit the composite structure system to learn a simpler model on each component/mode. We use Gaussian Process Regression techniques to learn smooth, nonlinear manifolds across mode transitions, guard-regions, and make multi-step ahead predictions on each mode dynamics. We combine a PWS non-linear model with a particle filter to effectively track multi-modal transitions. We further use synthetic oversampling techniques to address the challenge of detecting mode transition which is sparse compared to mode dynamics. This work provides an effective form of model learning in a complex hybrid system, which can be useful for future integration in a reinforcement learning setting. We compare multi-step prediction and tracking performance against traditional dynamical system tracking methods, such as EKF and Switching Gaussian Processes, and show that this framework performs significantly better, being able to correctly track complex dynamics with sparse transitions.