 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormalising Concepts as Grounded Abstractions
Jan 13, 2021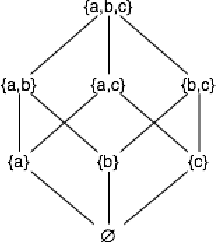
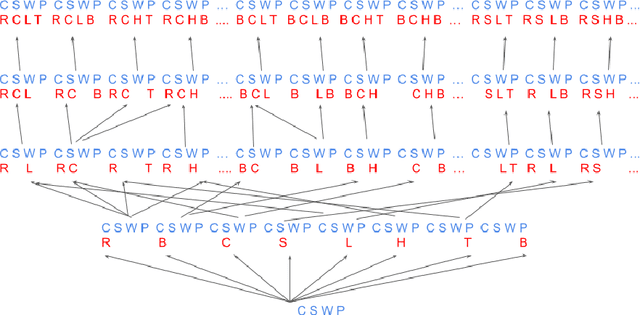
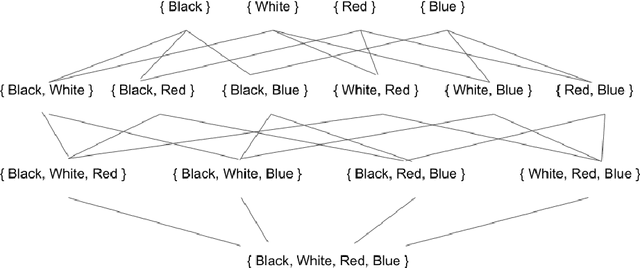
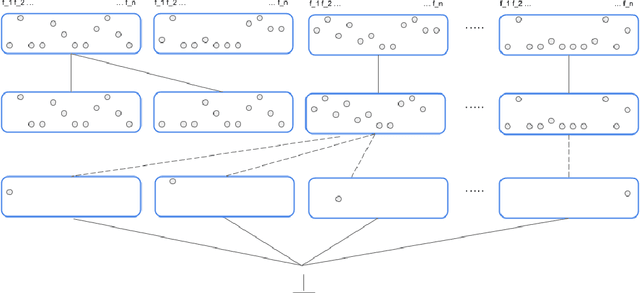
The notion of concept has been studied for centuries, by philosophers, linguists, cognitive scientists, and researchers in artificial intelligence (Margolis & Laurence, 1999). There is a large literature on formal, mathematical models of concepts, including a whole sub-field of AI -- Formal Concept Analysis -- devoted to this topic (Ganter & Obiedkov, 2016). Recently, researchers in machine learning have begun to investigate how methods from representation learning can be used to induce concepts from raw perceptual data (Higgins, Sonnerat, et al., 2018). The goal of this report is to provide a formal account of concepts which is compatible with this latest work in deep learning. The main technical goal of this report is to show how techniques from representation learning can be married with a lattice-theoretic formulation of conceptual spaces. The mathematics of partial orders and lattices is a standard tool for modelling conceptual spaces (Ch.2, Mitchell (1997), Ganter and Obiedkov (2016)); however, there is no formal work that we are aware of which defines a conceptual lattice on top of a representation that is induced using unsupervised deep learning (Goodfellow et al., 2016). The advantages of partially-ordered lattice structures are that these provide natural mechanisms for use in concept discovery algorithms, through the meets and joins of the lattice.
COBRA: Data-Efficient Model-Based RL through Unsupervised Object Discovery and Curiosity-Driven Exploration
May 22, 2019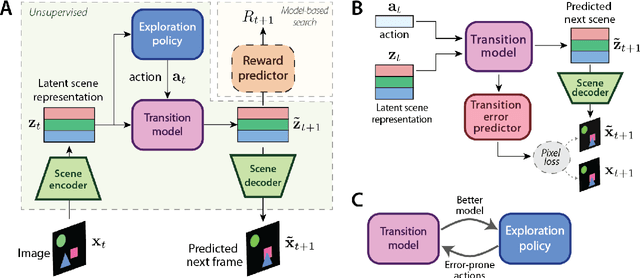
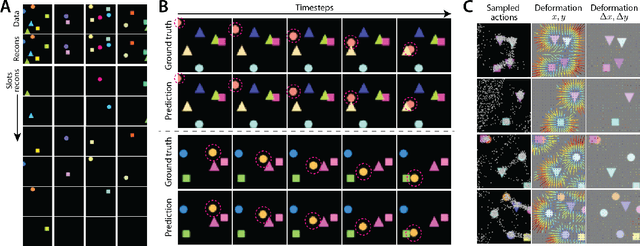
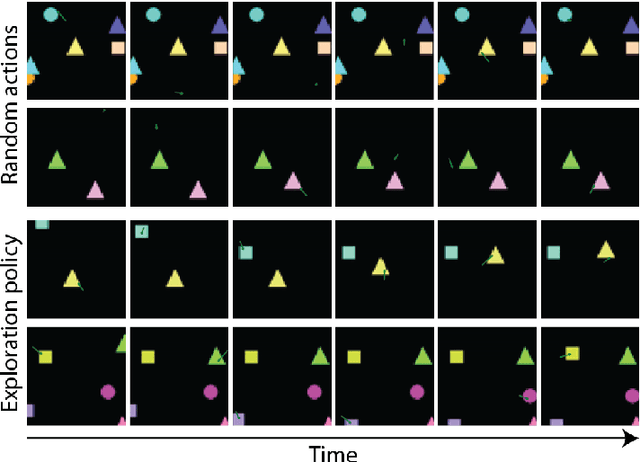
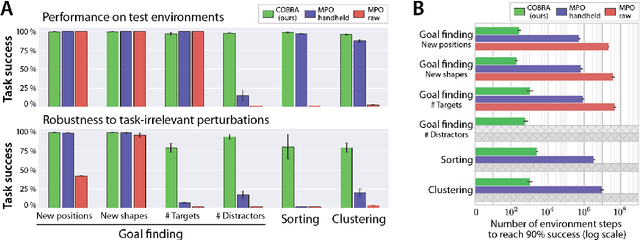
Data efficiency and robustness to task-irrelevant perturbations are long-standing challenges for deep reinforcement learning algorithms. Here we introduce a modular approach to addressing these challenges in a continuous control environment, without using hand-crafted or supervised information. Our Curious Object-Based seaRch Agent (COBRA) uses task-free intrinsically motivated exploration and unsupervised learning to build object-based models of its environment and action space. Subsequently, it can learn a variety of tasks through model-based search in very few steps and excel on structured hold-out tests of policy robustness.
Towards Neural Theorem Proving at Scale
Jul 21, 2018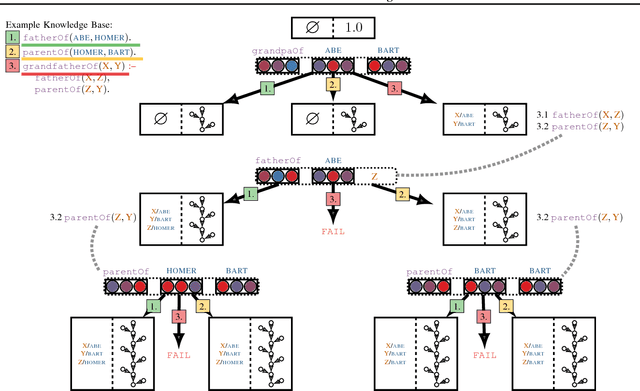
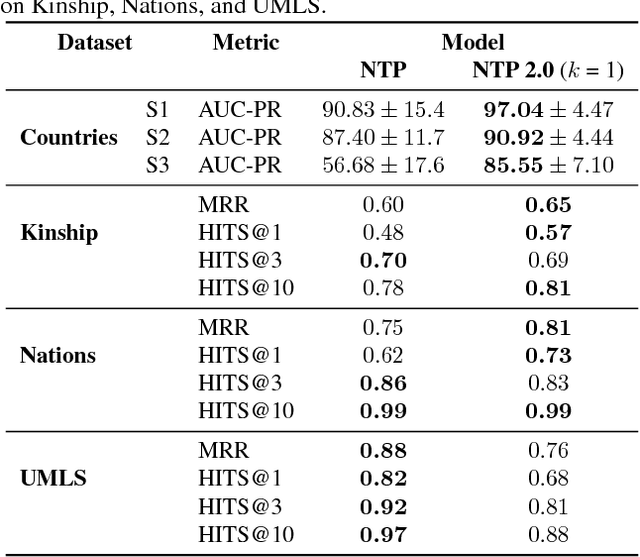
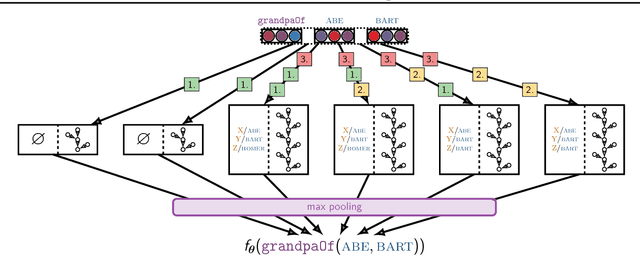
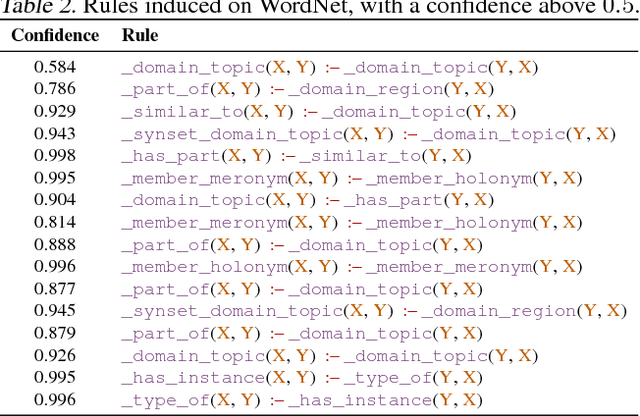
Neural models combining representation learning and reasoning in an end-to-end trainable manner are receiving increasing interest. However, their use is severely limited by their computational complexity, which renders them unusable on real world datasets. We focus on the Neural Theorem Prover (NTP) model proposed by Rockt{\"{a}}schel and Riedel (2017), a continuous relaxation of the Prolog backward chaining algorithm where unification between terms is replaced by the similarity between their embedding representations. For answering a given query, this model needs to consider all possible proof paths, and then aggregate results - this quickly becomes infeasible even for small Knowledge Bases (KBs). We observe that we can accurately approximate the inference process in this model by considering only proof paths associated with the highest proof scores. This enables inference and learning on previously impracticable KBs.
SCAN: Learning Hierarchical Compositional Visual Concepts
Jun 06, 2018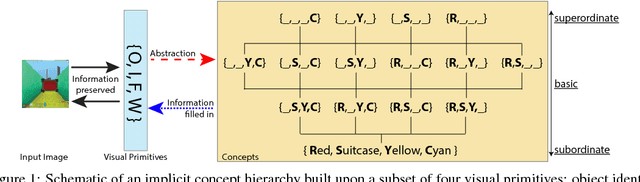
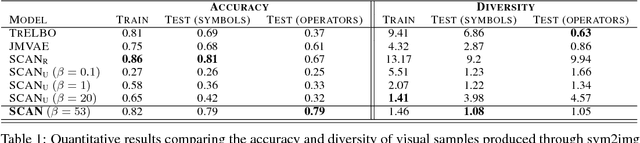
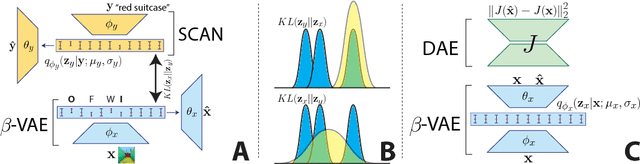
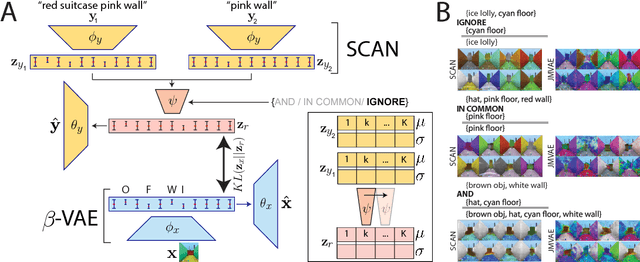
The seemingly infinite diversity of the natural world arises from a relatively small set of coherent rules, such as the laws of physics or chemistry. We conjecture that these rules give rise to regularities that can be discovered through primarily unsupervised experiences and represented as abstract concepts. If such representations are compositional and hierarchical, they can be recombined into an exponentially large set of new concepts. This paper describes SCAN (Symbol-Concept Association Network), a new framework for learning such abstractions in the visual domain. SCAN learns concepts through fast symbol association, grounding them in disentangled visual primitives that are discovered in an unsupervised manner. Unlike state of the art multimodal generative model baselines, our approach requires very few pairings between symbols and images and makes no assumptions about the form of symbol representations. Once trained, SCAN is capable of multimodal bi-directional inference, generating a diverse set of image samples from symbolic descriptions and vice versa. It also allows for traversal and manipulation of the implicit hierarchy of visual concepts through symbolic instructions and learnt logical recombination operations. Such manipulations enable SCAN to break away from its training data distribution and imagine novel visual concepts through symbolically instructed recombination of previously learnt concepts.