 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDendroNN: Dendrocentric Neural Networks for Energy-Efficient Classification of Event-Based Data
Mar 10, 2026Spatiotemporal information is at the core of diverse sensory processing and computational tasks. Feed-forward spiking neural networks can be used to solve these tasks while offering potential benefits in terms of energy efficiency by computing event-based. However, they have trouble decoding temporal information with high accuracy. Thus, they commonly resort to recurrence or delays to enhance their temporal computing ability which, however, bring downsides in terms of hardware-efficiency. In the brain, dendrites are computational powerhouses that just recently started to be acknowledged in such machine learning systems. In this work, we focus on a sequence detection mechanism present in branches of dendrites and translate it into a novel type of neural network by introducing a dendrocentric neural network, DendroNN. DendroNNs identify unique incoming spike sequences as spatiotemporal features. This work further introduces a rewiring phase to train the non-differentiable spike sequences without the use of gradients. During the rewiring, the network memorizes frequently occurring sequences and additionally discards those that do not contribute any discriminative information. The networks display competitive accuracies across various event-based time series datasets. We also propose an asynchronous digital hardware architecture using a time-wheel mechanism that builds on the event-driven design of DendroNNs, eliminating per-step global updates typical of delay- or recurrence-based models. By leveraging a DendroNN's dynamic and static sparsity along with intrinsic quantization, it achieves up to 4x higher efficiency than state-of-the-art neuromorphic hardware at comparable accuracy on the same audio classification task, demonstrating its suitability for spatiotemporal event-based computing. This work offers a novel approach to low-power spatiotemporal processing on event-driven hardware.
Neuromorphic implementation of ECG anomaly detection using delay chains
Sep 02, 2022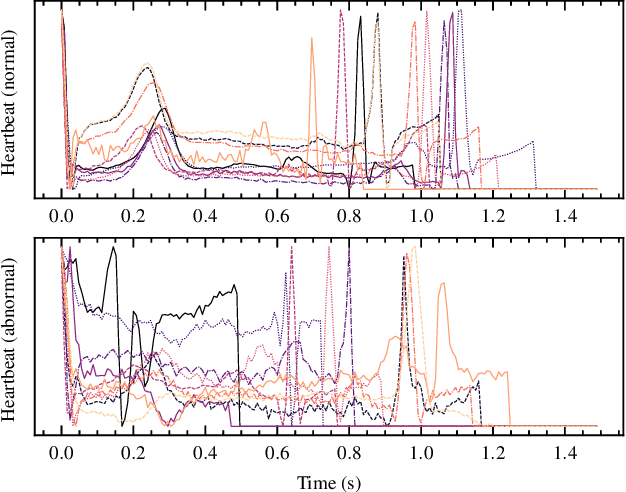
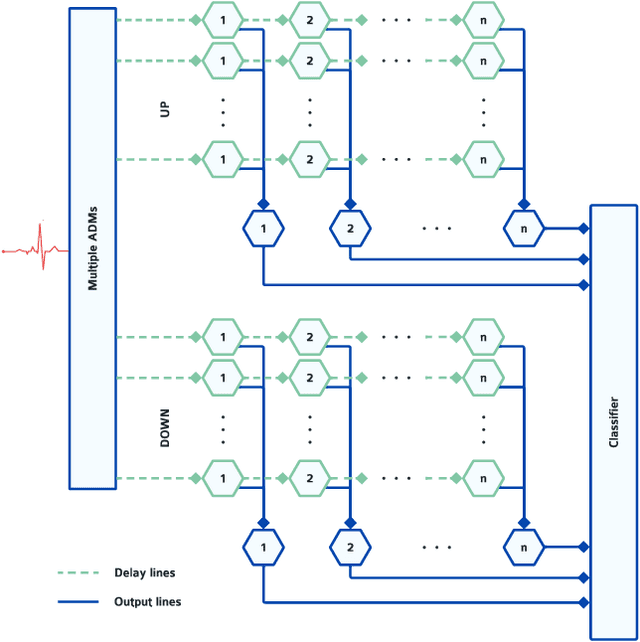
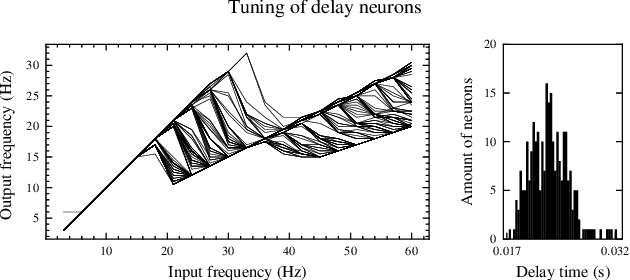
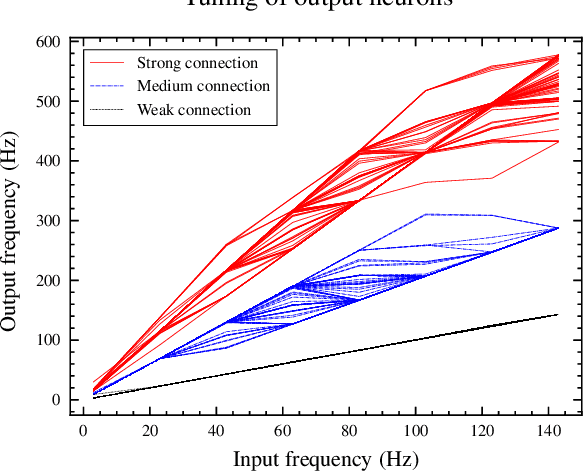
Real-time analysis and classification of bio-signals measured using wearable devices is computationally costly and requires dedicated low-power hardware. One promising approach is to use spiking neural networks implemented using in-memory computing architectures and neuromorphic electronic circuits. However, as these circuits process data in streaming mode without the possibility of storing it in external buffers, a major challenge lies in the processing of spatio-temporal signals that last longer than the time constants present in the network synapses and neurons. Here we propose to extend the memory capacity of a spiking neural network by using parallel delay chains. We show that it is possible to map temporal signals of multiple seconds into spiking activity distributed across multiple neurons which have time constants of few milliseconds. We validate this approach on an ECG anomaly detection task and present experimental results that demonstrate how temporal information is properly preserved in the network activity.
Towards hardware Implementation of WTA for CPG-based control of a Spiking Robotic Arm
Feb 14, 2022



Biological nervous systems typically perform the control of numerous degrees of freedom for example in animal limbs. Neuromorphic engineers study these systems by emulating them in hardware for a deeper understanding and its possible application to solve complex problems in engineering and robotics. Central-Pattern-Generators (CPGs) are part of neuro-controllers, typically used at their last steps to produce rhythmic patterns for limbs movement. Different patterns and gaits typically compete through winner-take-all (WTA) circuits to produce the right movements. In this work we present a WTA circuit implemented in a Spiking-Neural-Network (SNN) processor to produce such patterns for controlling a robotic arm in real-time. The robot uses spike-based proportional-integrativederivative (SPID) controllers to keep a commanded joint position from the winner population of neurons of the WTA circuit. Experiments demonstrate the feasibility of robotic control with spiking circuits following brain-inspiration.