 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaritime object classification with SAR imagery using quantum kernel methods
Dec 12, 2025



Illegal, unreported, and unregulated (IUU) fishing causes global economic losses of \$10-25 billion annually and undermines marine sustainability and governance. Synthetic Aperture Radar (SAR) provides reliable maritime surveillance under all weather and lighting conditions, but classifying small maritime objects in SAR imagery remains challenging. We investigate quantum machine learning for this task, focusing on Quantum Kernel Methods (QKMs) applied to real and complex SAR chips extracted from the SARFish dataset. We tackle two binary classification problems, the first for distinguishing vessels from non-vessels, and the second for distinguishing fishing vessels from other types of vessels. We compare QKMs applied to real and complex SAR chips against classical Laplacian, RBF, and linear kernels applied to real SAR chips. Using noiseless numerical simulations of the quantum kernels, we find that QKMs are capable of obtaining equal or better performance than the classical kernel on these tasks in the best case, but do not demonstrate a clear advantage for the complex SAR data. This work presents the first application of QKMs to maritime classification in SAR imagery and offers insight into the potential and current limitations of quantum-enhanced learning for maritime surveillance.
DocSpiral: A Platform for Integrated Assistive Document Annotation through Human-in-the-Spiral
May 06, 2025Acquiring structured data from domain-specific, image-based documents such as scanned reports is crucial for many downstream tasks but remains challenging due to document variability. Many of these documents exist as images rather than as machine-readable text, which requires human annotation to train automated extraction systems. We present DocSpiral, the first Human-in-the-Spiral assistive document annotation platform, designed to address the challenge of extracting structured information from domain-specific, image-based document collections. Our spiral design establishes an iterative cycle in which human annotations train models that progressively require less manual intervention. DocSpiral integrates document format normalization, comprehensive annotation interfaces, evaluation metrics dashboard, and API endpoints for the development of AI / ML models into a unified workflow. Experiments demonstrate that our framework reduces annotation time by at least 41\% while showing consistent performance gains across three iterations during model training. By making this annotation platform freely accessible, we aim to lower barriers to AI/ML models development in document processing, facilitating the adoption of large language models in image-based, document-intensive fields such as geoscience and healthcare. The system is freely available at: https://app.ai4wa.com. The demonstration video is available: https://app.ai4wa.com/docs/docspiral/demo.
TimelineKGQA: A Comprehensive Question-Answer Pair Generator for Temporal Knowledge Graphs
Jan 08, 2025



Question answering over temporal knowledge graphs (TKGs) is crucial for understanding evolving facts and relationships, yet its development is hindered by limited datasets and difficulties in generating custom QA pairs. We propose a novel categorization framework based on timeline-context relationships, along with \textbf{TimelineKGQA}, a universal temporal QA generator applicable to any TKGs. The code is available at: \url{https://github.com/PascalSun/TimelineKGQA} as an open source Python package.
Scene Gated Social Graph: Pedestrian Trajectory Prediction Based on Dynamic Social Graphs and Scene Constraints
Oct 12, 2020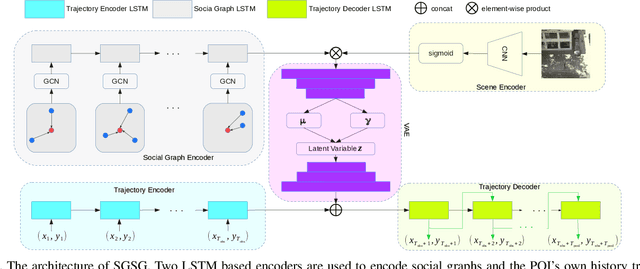

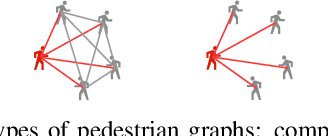
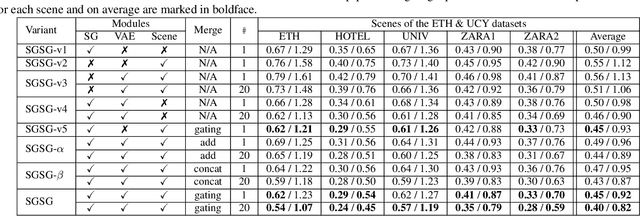
Pedestrian trajectory prediction is valuable for understanding human motion behaviors and it is challenging because of the social influence from other pedestrians, the scene constraints and the multimodal possibilities of predicted trajectories. Most existing methods only focus on two of the above three key elements. In order to jointly consider all these elements, we propose a novel trajectory prediction method named Scene Gated Social Graph (SGSG). In the proposed SGSG, dynamic graphs are used to describe the social relationship among pedestrians. The social and scene influences are taken into account through the scene gated social graph features which combine the encoded social graph features and semantic scene features. In addition, a VAE module is incorporated to learn the scene gated social feature and sample latent variables for generating multiple trajectories that are socially and environmentally acceptable. We compare our SGSG against twenty state-of-the-art pedestrian trajectory prediction methods and the results show that the proposed method achieves superior performance on two widely used trajectory prediction benchmarks.
Take a NAP: Non-Autoregressive Prediction for Pedestrian Trajectories
Apr 21, 2020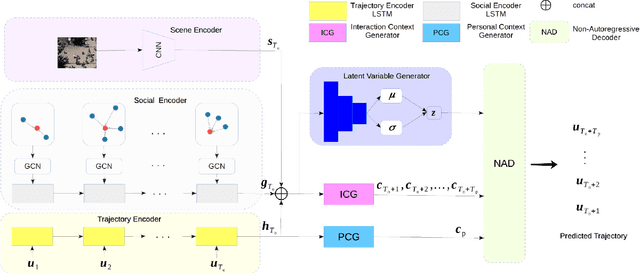
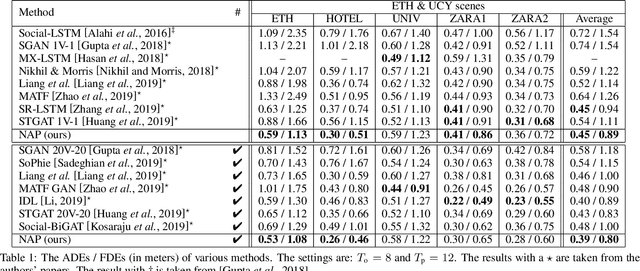


Pedestrian trajectory prediction is a challenging task as there are three properties of human movement behaviors which need to be addressed, namely, the social influence from other pedestrians, the scene constraints, and the multimodal (multiroute) nature of predictions. Although existing methods have explored these key properties, the prediction process of these methods is autoregressive. This means they can only predict future locations sequentially. In this paper, we present NAP, a non-autoregressive method for trajectory prediction. Our method comprises specifically designed feature encoders and a latent variable generator to handle the three properties above. It also has a time-agnostic context generator and a time-specific context generator for non-autoregressive prediction. Through extensive experiments that compare NAP against several recent methods, we show that NAP has state-of-the-art trajectory prediction performance.
A game-theoretic approach to timeline-based planning with uncertainty
Jul 12, 2018
In timeline-based planning, domains are described as sets of independent, but interacting, components, whose behaviour over time (the set of timelines) is governed by a set of temporal constraints. A distinguishing feature of timeline-based planning systems is the ability to integrate planning with execution by synthesising control strategies for flexible plans. However, flexible plans can only represent temporal uncertainty, while more complex forms of nondeterminism are needed to deal with a wider range of realistic problems. In this paper, we propose a novel game-theoretic approach to timeline-based planning problems, generalising the state of the art while uniformly handling temporal uncertainty and nondeterminism. We define a general concept of timeline-based game and we show that the notion of winning strategy for these games is strictly more general than that of control strategy for dynamically controllable flexible plans. Moreover, we show that the problem of establishing the existence of such winning strategies is decidable using a doubly exponential amount of space.