 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and Enforcing Context-Sensitive Control for LLMs
Apr 12, 2026Controlling the output of Large Language Models (LLMs) through context-sensitive constraints has emerged as a promising approach to overcome the limitations of Context-Free Grammars (CFGs) in guaranteeing generation validity. However, such constraints typically require manual specification -- a significant barrier demanding specialized expertise. We introduce a framework that automatically learns context-sensitive constraints from LLM interactions through a two-phase process: syntactic exploration to gather diverse outputs for constraint learning, followed by constraint exploitation to enforce these learned rules during generation. Experiments demonstrate that our method enables even small LLMs (1B parameters) to learn and generate with perfect constraint adherence, outperforming larger counterparts and state-of-the-art reasoning models. This work represents the first integration of context-sensitive grammar learning with LLM generation, eliminating manual specification while maintaining generation validity.
* ACL 2025 Student Research Workshop
LearnAD: Learning Interpretable Rules for Brain Networks in Alzheimer's Disease Classification
Dec 30, 2025We introduce LearnAD, a neuro-symbolic method for predicting Alzheimer's disease from brain magnetic resonance imaging data, learning fully interpretable rules. LearnAD applies statistical models, Decision Trees, Random Forests, or GNNs to identify relevant brain connections, and then employs FastLAS to learn global rules. Our best instance outperforms Decision Trees, matches Support Vector Machine accuracy, and performs only slightly below Random Forests and GNNs trained on all features, all while remaining fully interpretable. Ablation studies show that our neuro-symbolic approach improves interpretability with comparable performance to pure statistical models. LearnAD demonstrates how symbolic learning can deepen our understanding of GNN behaviour in clinical neuroscience.
The Role of Foundation Models in Neuro-Symbolic Learning and Reasoning
Feb 02, 2024Neuro-Symbolic AI (NeSy) holds promise to ensure the safe deployment of AI systems, as interpretable symbolic techniques provide formal behaviour guarantees. The challenge is how to effectively integrate neural and symbolic computation, to enable learning and reasoning from raw data. Existing pipelines that train the neural and symbolic components sequentially require extensive labelling, whereas end-to-end approaches are limited in terms of scalability, due to the combinatorial explosion in the symbol grounding problem. In this paper, we leverage the implicit knowledge within foundation models to enhance the performance in NeSy tasks, whilst reducing the amount of data labelling and manual engineering. We introduce a new architecture, called NeSyGPT, which fine-tunes a vision-language foundation model to extract symbolic features from raw data, before learning a highly expressive answer set program to solve a downstream task. Our comprehensive evaluation demonstrates that NeSyGPT has superior accuracy over various baselines, and can scale to complex NeSy tasks. Finally, we highlight the effective use of a large language model to generate the programmatic interface between the neural and symbolic components, significantly reducing the amount of manual engineering required.
A Unifying Framework for Learning Argumentation Semantics
Oct 18, 2023



Argumentation is a very active research field of Artificial Intelligence concerned with the representation and evaluation of arguments used in dialogues between humans and/or artificial agents. Acceptability semantics of formal argumentation systems define the criteria for the acceptance or rejection of arguments. Several software systems, known as argumentation solvers, have been developed to compute the accepted/rejected arguments using such criteria. These include systems that learn to identify the accepted arguments using non-interpretable methods. In this paper we present a novel framework, which uses an Inductive Logic Programming approach to learn the acceptability semantics for several abstract and structured argumentation frameworks in an interpretable way. Through an empirical evaluation we show that our framework outperforms existing argumentation solvers, thus opening up new future research directions in the area of formal argumentation and human-machine dialogues.
Hierarchies of Reward Machines
May 31, 2022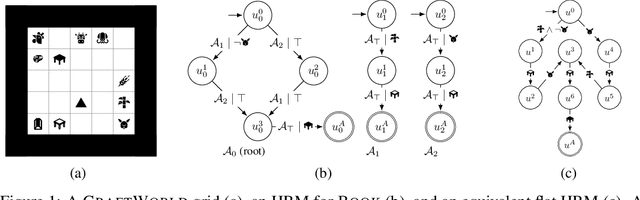


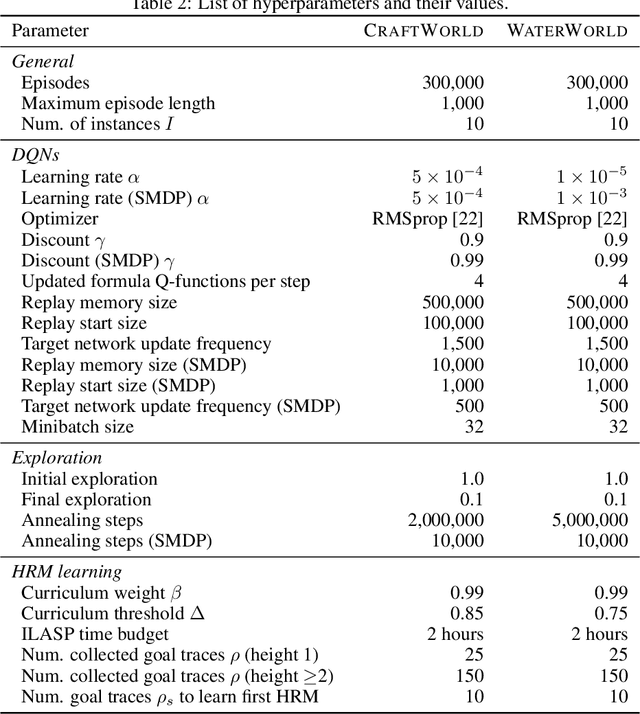
Reward machines (RMs) are a recent formalism for representing the reward function of a reinforcement learning task through a finite-state machine whose edges encode landmarks of the task using high-level events. The structure of RMs enables the decomposition of a task into simpler and independently solvable subtasks that help tackle long-horizon and/or sparse reward tasks. We propose a formalism for further abstracting the subtask structure by endowing an RM with the ability to call other RMs, thus composing a hierarchy of RMs (HRM). We exploit HRMs by treating each call to an RM as an independently solvable subtask using the options framework, and describe a curriculum-based method to induce HRMs from example traces observed by the agent. Our experiments reveal that exploiting a handcrafted HRM leads to faster convergence than with a flat HRM, and that learning an HRM is more scalable than learning an equivalent flat HRM.
Inductive Learning of Complex Knowledge from Raw Data
May 25, 2022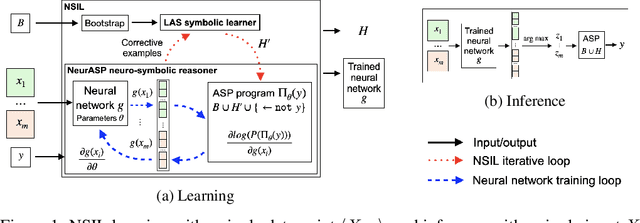
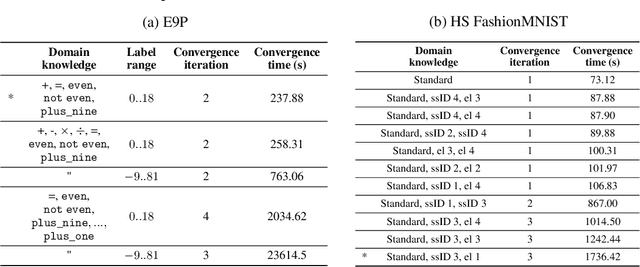
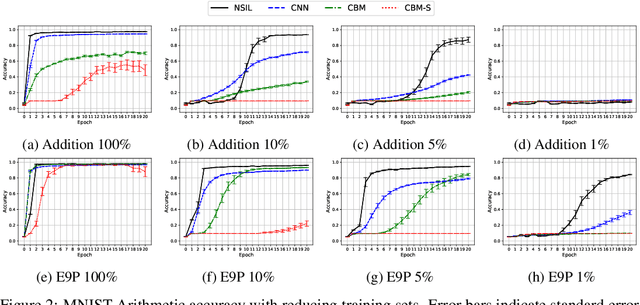
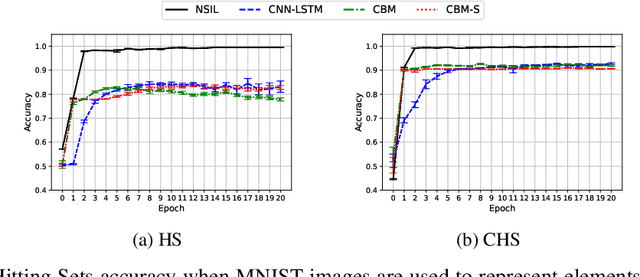
One of the ultimate goals of Artificial Intelligence is to learn generalised and human-interpretable knowledge from raw data. Neuro-symbolic reasoning approaches partly tackle this problem by improving the training of a neural network using a manually engineered symbolic knowledge base. In the case where symbolic knowledge is learned from raw data, this knowledge lacks the expressivity required to solve complex problems. In this paper, we introduce Neuro-Symbolic Inductive Learner (NSIL), an approach that trains a neural network to extract latent concepts from raw data, whilst learning symbolic knowledge that solves complex problems, defined in terms of these latent concepts. The novelty of our approach is a method for biasing a symbolic learner to learn improved knowledge, based on the in-training performance of both neural and symbolic components. We evaluate NSIL on two problem domains that require learning knowledge with different levels of complexity, and demonstrate that NSIL learns knowledge that is not possible to learn with other neuro-symbolic systems, whilst outperforming baseline models in terms of accuracy and data efficiency.
Efficient lifting of symmetry breaking constraints for complex combinatorial problems
May 14, 2022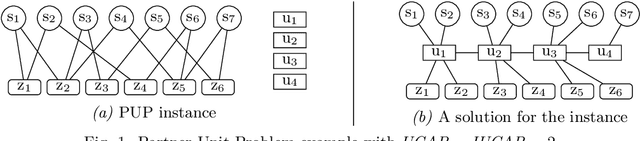
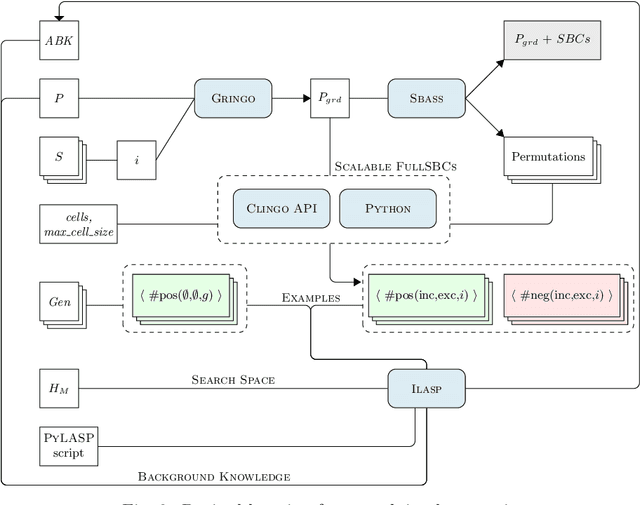
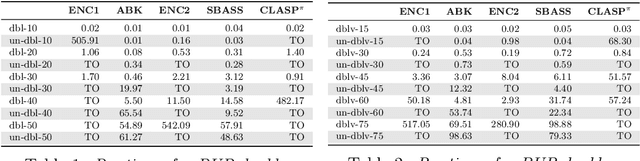
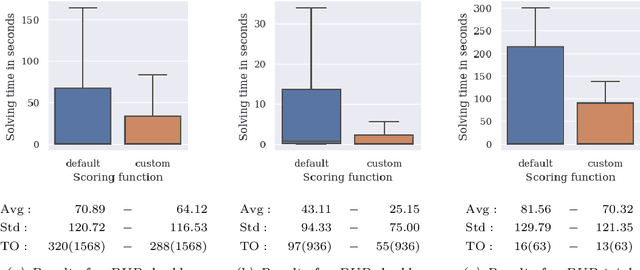
Many industrial applications require finding solutions to challenging combinatorial problems. Efficient elimination of symmetric solution candidates is one of the key enablers for high-performance solving. However, existing model-based approaches for symmetry breaking are limited to problems for which a set of representative and easily-solvable instances is available, which is often not the case in practical applications. This work extends the learning framework and implementation of a model-based approach for Answer Set Programming to overcome these limitations and address challenging problems, such as the Partner Units Problem. In particular, we incorporate a new conflict analysis algorithm in the Inductive Logic Programming system ILASP, redefine the learning task, and suggest a new example generation method to scale up the approach. The experiments conducted for different kinds of Partner Units Problem instances demonstrate the applicability of our approach and the computational benefits due to the first-order constraints learned.
FF-NSL: Feed-Forward Neural-Symbolic Learner
Jul 02, 2021
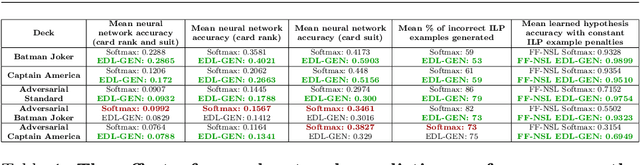

Inductive Logic Programming (ILP) aims to learn generalised, interpretable hypotheses in a data-efficient manner. However, current ILP systems require training examples to be specified in a structured logical form. To address this problem, this paper proposes a neural-symbolic learning framework, called Feed-Forward Neural-Symbolic Learner (FF-NSL), that integrates state-of-the-art ILP systems, based on the Answer Set semantics, with Neural Networks (NNs), in order to learn interpretable hypotheses from labelled unstructured data. To demonstrate the generality and robustness of FF-NSL, we use two datasets subject to distributional shifts, for which pre-trained NNs may give incorrect predictions with high confidence. Experimental results show that FF-NSL outperforms tree-based and neural-based approaches by learning more accurate and interpretable hypotheses with fewer examples.
Conflict-driven Inductive Logic Programming
Dec 31, 2020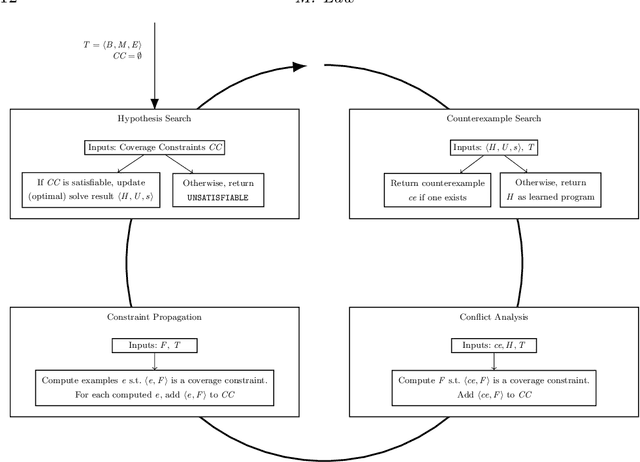
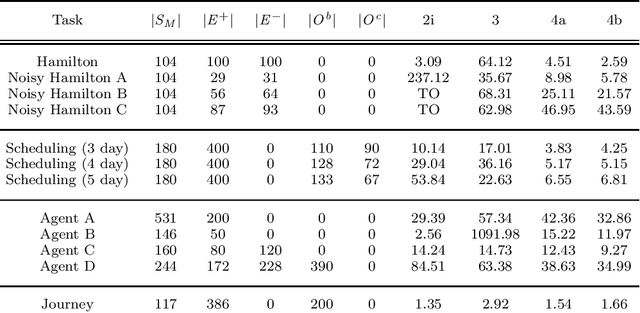
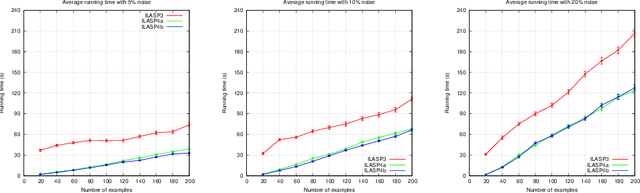
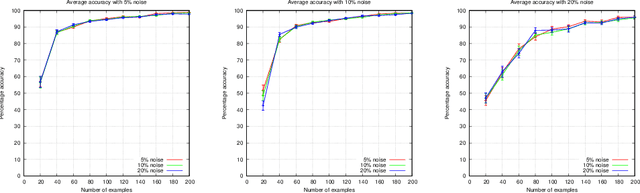
The goal of Inductive Logic Programming (ILP) is to learn a program that explains a set of examples. Until recently, most research on ILP targeted learning Prolog programs. The ILASP system instead learns Answer Set Programs (ASP). Learning such expressive programs widens the applicability of ILP considerably; for example, enabling preference learning, learning common-sense knowledge, including defaults and exceptions, and learning non-deterministic theories. Early versions of ILASP can be considered meta-level ILP approaches, which encode a learning task as a logic program and delegate the search to an ASP solver. More recently, ILASP has shifted towards a new method, inspired by conflict-driven SAT and ASP solvers. The fundamental idea of the approach, called Conflict-driven ILP (CDILP), is to iteratively interleave the search for a hypothesis with the generation of constraints which explain why the current hypothesis does not cover a particular example. These coverage constraints allow ILASP to rule out not just the current hypothesis, but an entire class of hypotheses that do not satisfy the coverage constraint. This paper formalises the CDILP approach and presents the ILASP3 and ILASP4 systems for CDILP, which are demonstrated to be more scalable than previous ILASP systems, particularly in the presence of noise.
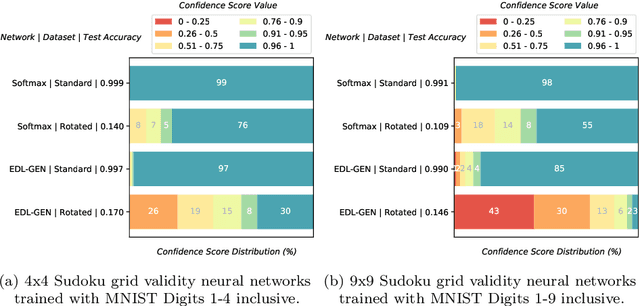
NSL: Hybrid Interpretable Learning From Noisy Raw Data
Dec 09, 2020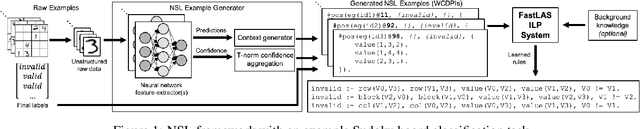
Inductive Logic Programming (ILP) systems learn generalised, interpretable rules in a data-efficient manner utilising existing background knowledge. However, current ILP systems require training examples to be specified in a structured logical format. Neural networks learn from unstructured data, although their learned models may be difficult to interpret and are vulnerable to data perturbations at run-time. This paper introduces a hybrid neural-symbolic learning framework, called NSL, that learns interpretable rules from labelled unstructured data. NSL combines pre-trained neural networks for feature extraction with FastLAS, a state-of-the-art ILP system for rule learning under the answer set semantics. Features extracted by the neural components define the structured context of labelled examples and the confidence of the neural predictions determines the level of noise of the examples. Using the scoring function of FastLAS, NSL searches for short, interpretable rules that generalise over such noisy examples. We evaluate our framework on propositional and first-order classification tasks using the MNIST dataset as raw data. Specifically, we demonstrate that NSL is able to learn robust rules from perturbed MNIST data and achieve comparable or superior accuracy when compared to neural network and random forest baselines whilst being more general and interpretable.