 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly Supervised Deep Learning Approach in Streaming Environments
Nov 14, 2019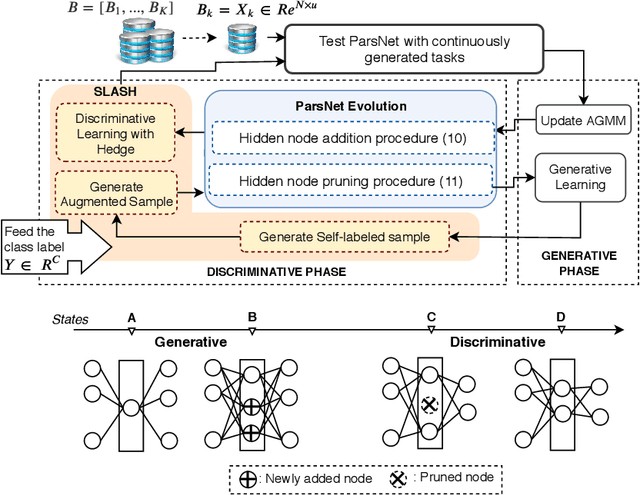
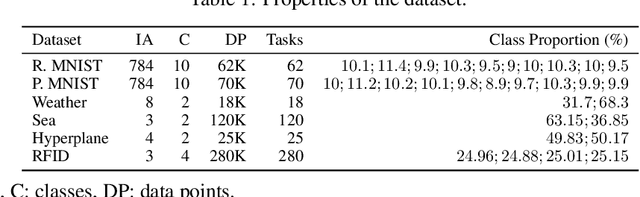
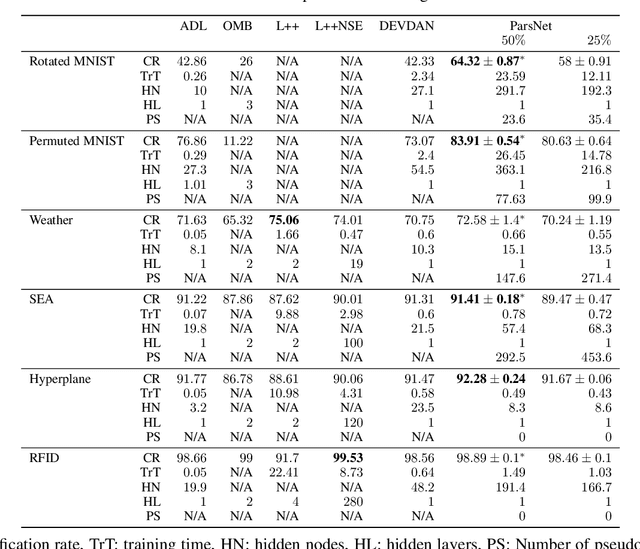
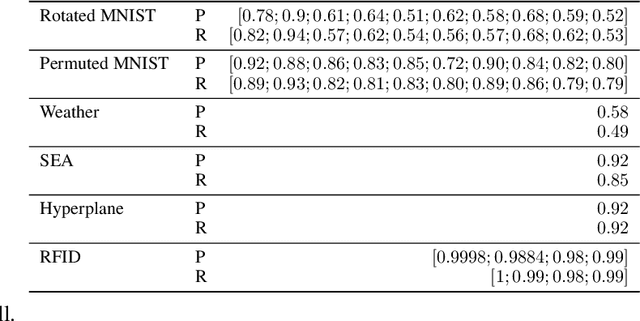
The feasibility of existing data stream algorithms is often hindered by the weakly supervised condition of data streams. A self-evolving deep neural network, namely Parsimonious Network (ParsNet), is proposed as a solution to various weakly-supervised data stream problems. A self-labelling strategy with hedge (SLASH) is proposed in which its auto-correction mechanism copes with \textit{the accumulation of mistakes} significantly affecting the model's generalization. ParsNet is developed from a closed-loop configuration of the self-evolving generative and discriminative training processes exploiting shared parameters in which its structure flexibly grows and shrinks to overcome the issue of concept drift with/without labels. The numerical evaluation has been performed under two challenging problems, namely sporadic access to ground truth and infinitely delayed access to the ground truth. Our numerical study shows the advantage of ParsNet with a substantial margin from its counterparts in the high-dimensional data streams and infinite delay simulation protocol. To support the reproducible research initiative, the source code of ParsNet along with supplementary materials are made available at https://bit.ly/2qNW7p4.
Toward Underground Localization: Lidar Inertial Odometry Enabled Aerial Robot Navigation
Oct 29, 2019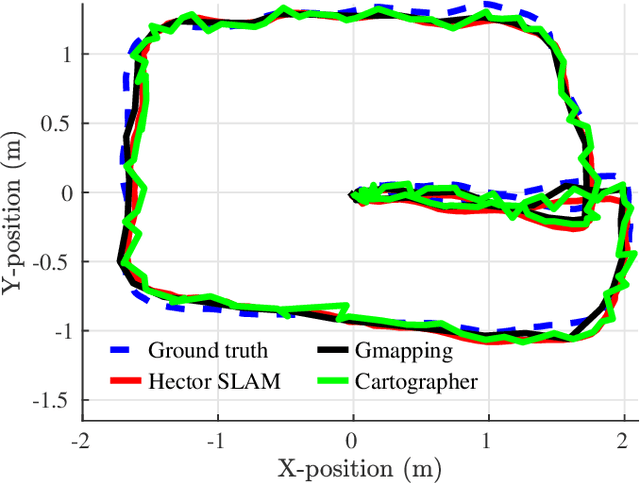
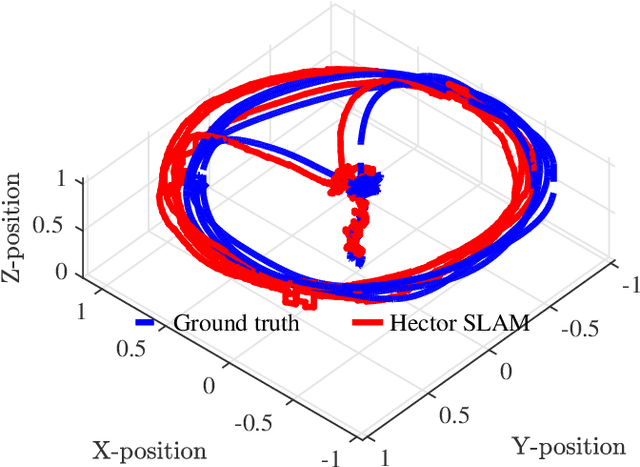
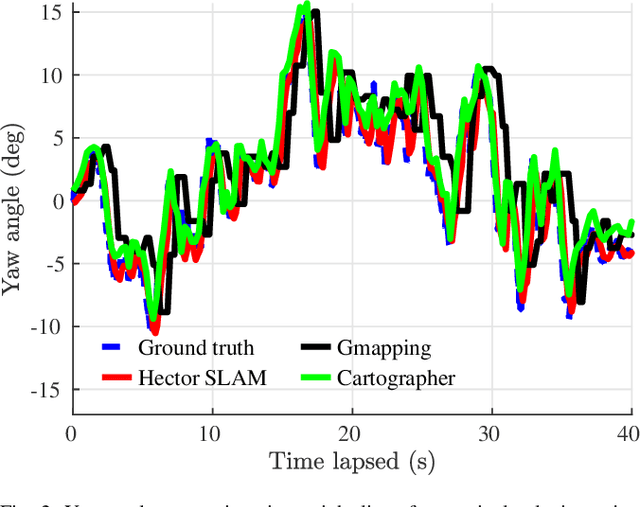
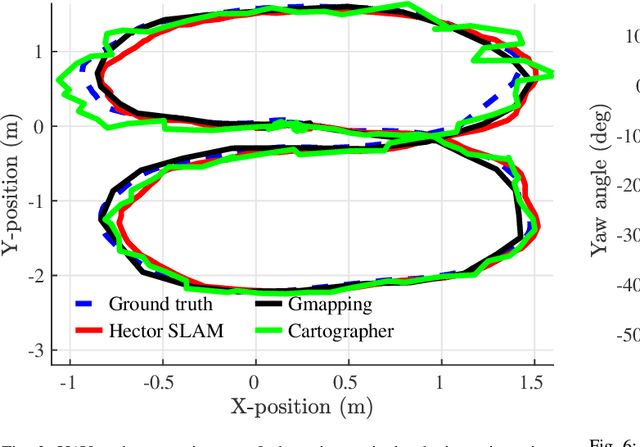
Localization can be achieved by different sensors and techniques such as a global positioning system (GPS), wifi, ultrasonic sensors, and cameras. In this paper, we focus on the laser-based localization method for unmanned aerial vehicle (UAV) applications in a GPS denied environment such as a deep tunnel system. Other than a low-cost 2D LiDAR for the planar axes, a single axis Lidar for the vertical axis as well as an inertial measurement unit (IMU) device is used to increase the reliability and accuracy of the localization performance. We present a comparative analysis of the three selected laser-based simultaneous localization and mapping(SLAM) approaches:(i) Hector SLAM; (ii) Gmapping; and(iii) Cartographer. These algorithms have been implemented and tested through real-world experiments. The results are compared with the ground truth data and the experiments are available at https://youtu.be/kQc3mJjw_mw.
ATL: Autonomous Knowledge Transfer from Many Streaming Processes
Oct 19, 2019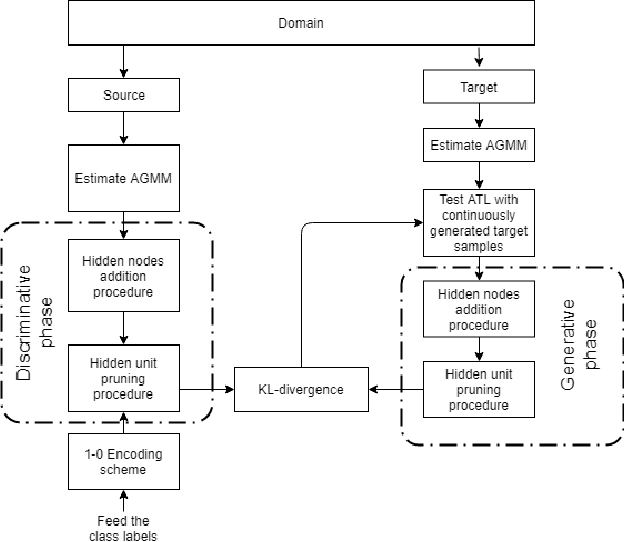
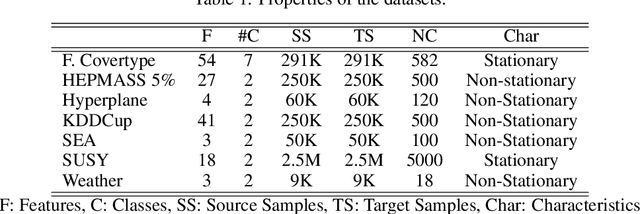
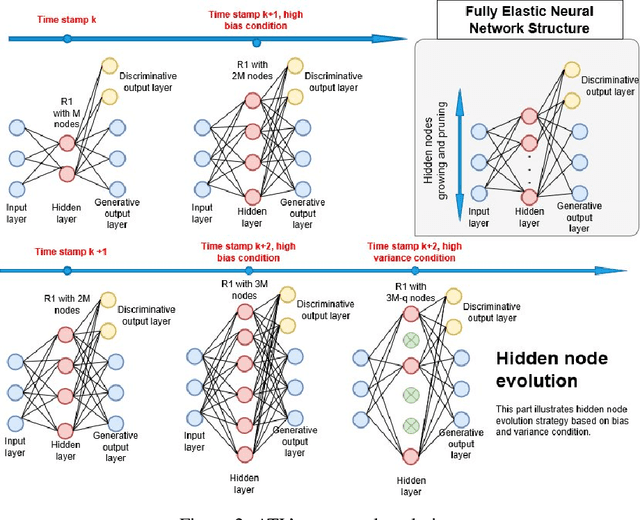
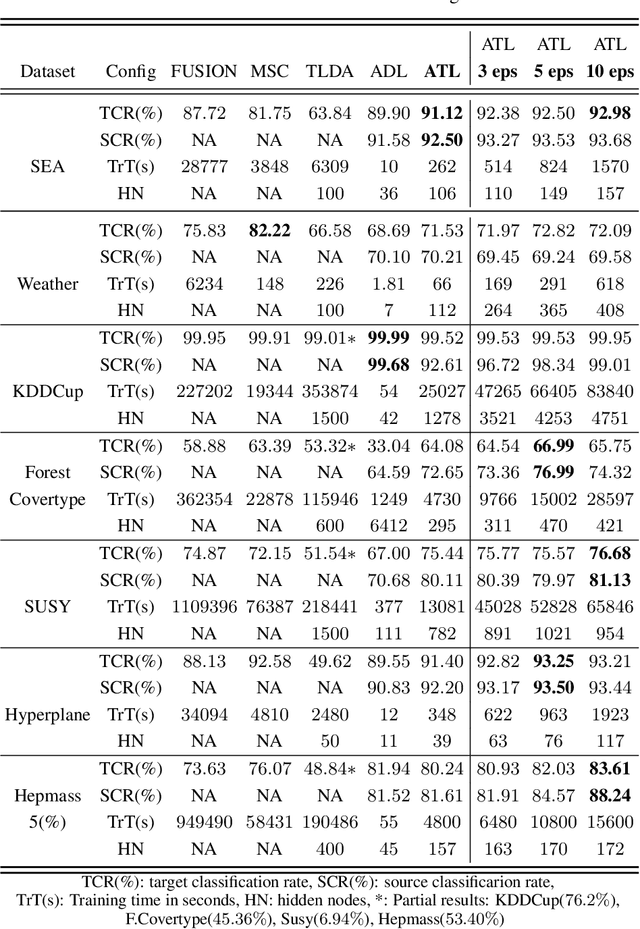
Transferring knowledge across many streaming processes remains an uncharted territory in the existing literature and features unique characteristics: no labelled instance of the target domain, covariate shift of source and target domain, different period of drifts in the source and target domains. Autonomous transfer learning (ATL) is proposed in this paper as a flexible deep learning approach for the online unsupervised transfer learning problem across many streaming processes. ATL offers an online domain adaptation strategy via the generative and discriminative phases coupled with the KL divergence based optimization strategy to produce a domain invariant network while putting forward an elastic network structure. It automatically evolves its network structure from scratch with/without the presence of ground truth to overcome independent concept drifts in the source and target domain. The rigorous numerical evaluation has been conducted along with a comparison against recently published works. ATL demonstrates improved performance while showing significantly faster training speed than its counterparts.
DEVDAN: Deep Evolving Denoising Autoencoder
Oct 08, 2019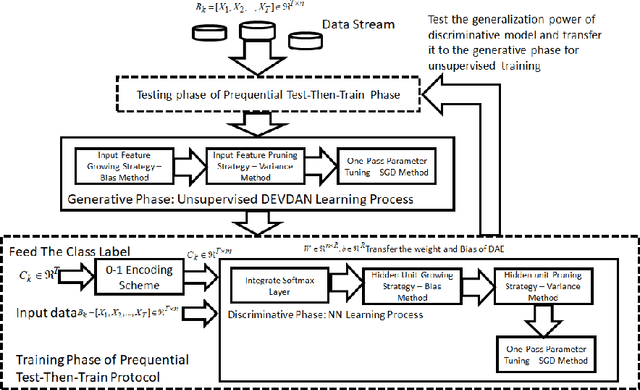
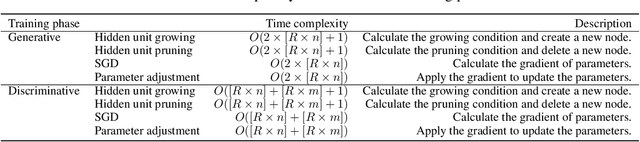
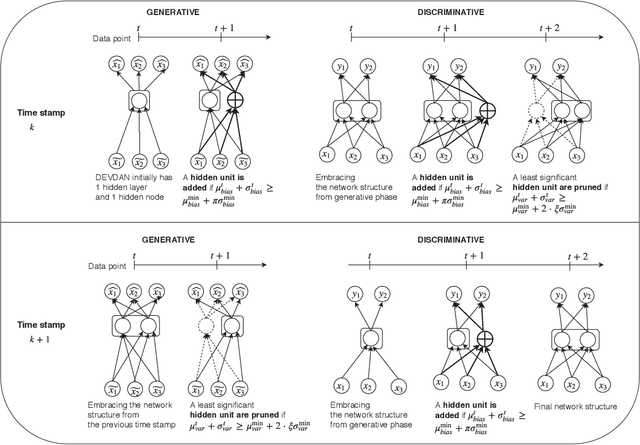
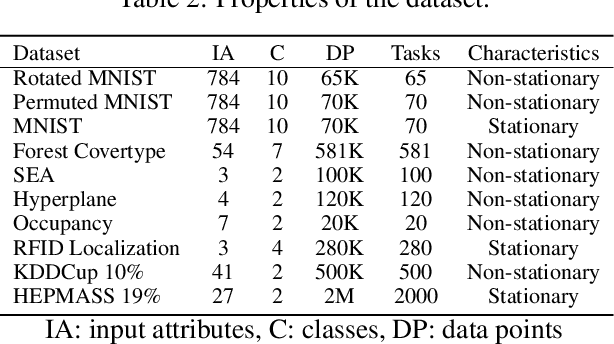
The Denoising Autoencoder (DAE) enhances the flexibility of the data stream method in exploiting unlabeled samples. Nonetheless, the feasibility of DAE for data stream analytic deserves an in-depth study because it characterizes a fixed network capacity that cannot adapt to rapidly changing environments. Deep evolving denoising autoencoder (DEVDAN), is proposed in this paper. It features an open structure in the generative phase and the discriminative phase where the hidden units can be automatically added and discarded on the fly. The generative phase refines the predictive performance of the discriminative model exploiting unlabeled data. Furthermore, DEVDAN is free of the problem-specific threshold and works fully in the single-pass learning fashion. We show that DEVDAN can find competitive network architecture compared with state-of-the-art methods on the classification task using ten prominent datasets simulated under the prequential test-then-train protocol.
Automatic Construction of Multi-layer Perceptron Network from Streaming Examples
Oct 08, 2019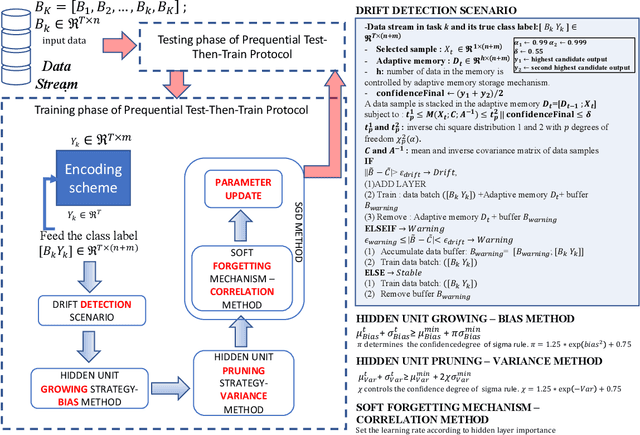
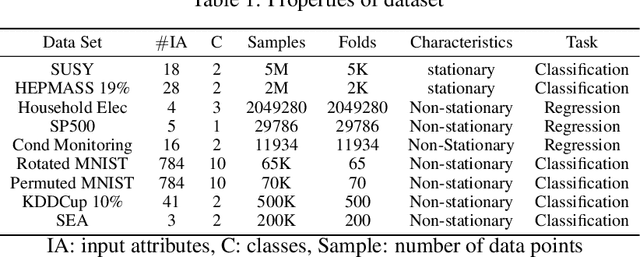
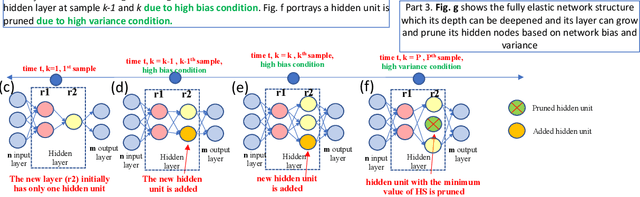
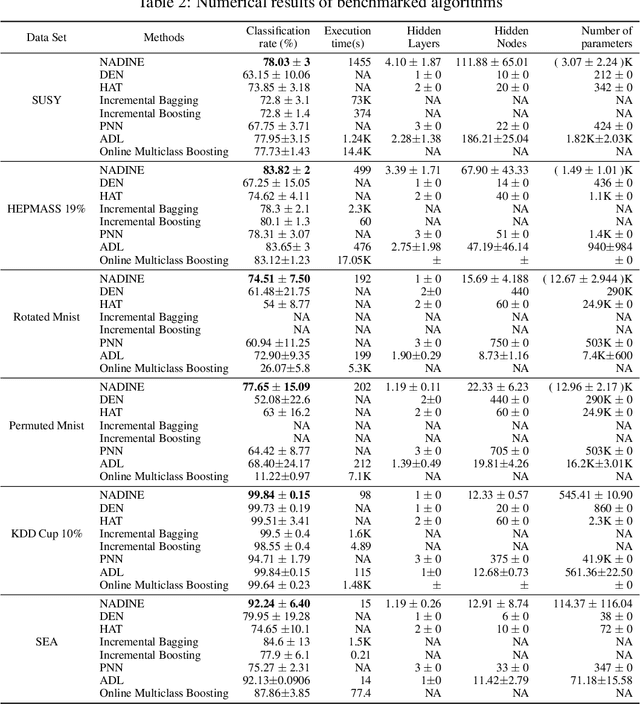
Autonomous construction of deep neural network (DNNs) is desired for data streams because it potentially offers two advantages: proper model's capacity and quick reaction to drift and shift. While the self-organizing mechanism of DNNs remains an open issue, this task is even more challenging to be developed for standard multi-layer DNNs than that using the different-depth structures, because the addition of a new layer results in information loss of previously trained knowledge. A Neural Network with Dynamically Evolved Capacity (NADINE) is proposed in this paper. NADINE features a fully open structure where its network structure, depth and width, can be automatically evolved from scratch in an online manner and without the use of problem-specific thresholds. NADINE is structured under a standard MLP architecture and the catastrophic forgetting issue during the hidden layer addition phase is resolved using the proposal of soft-forgetting and adaptive memory methods. The advantage of NADINE, namely elastic structure and online learning trait, is numerically validated using nine data stream classification and regression problems where it demonstrates performance improvement over prominent algorithms in all problems. In addition, it is capable of dealing with data stream regression and classification problems equally well.
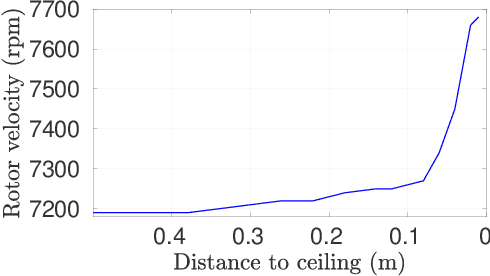
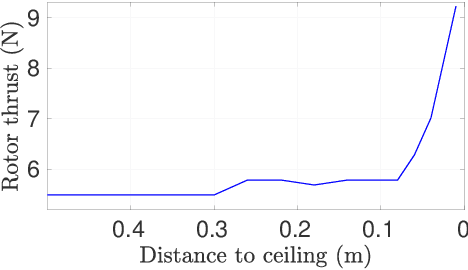
Aerial Robot Control in Close Proximity to Ceiling: A Force Estimation-based Nonlinear MPC
Jul 31, 2019
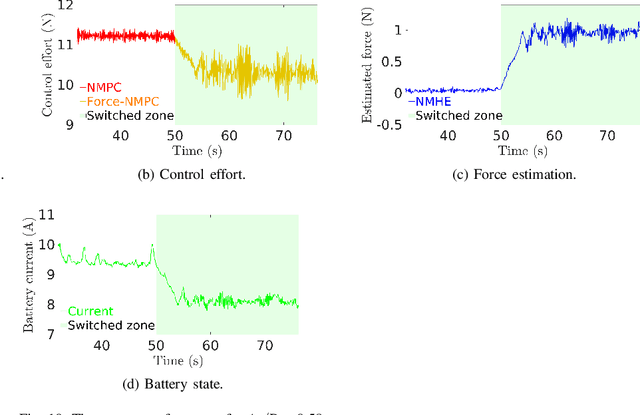
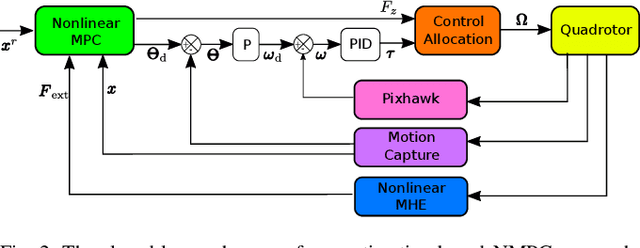
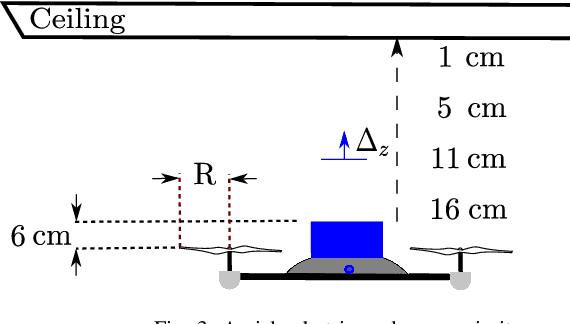
Being motivated by ceiling inspection applications via unmanned aerial vehicles (UAVs) which require close proximity flight to surfaces, a systematic control approach enabling safe and accurate close proximity flight is proposed in this work. There are two main challenges for close proximity flights: (i) the trust characteristics varies drastically for the different distance from the ceiling which results in a complex nonlinear dynamics; (ii) the system needs to consider physical and environmental constraints to safely fly in close proximity. To address these challenges, a novel framework consisting of a constrained optimization-based force estimation and an optimization-based nonlinear controller is proposed. Experimental results illustrate that the performance of the proposed control approach can stabilize UAV down to 1 cm distance to the ceiling. Furthermore, we report that the UAV consumes up to 12.5% less power when it is operated 1 cm distance to ceiling, which is promising potential for more battery-efficient inspection flights.
Real-time UAV Complex Missions Leveraging Self-Adaptive Controller with Elastic Structure
Jul 19, 2019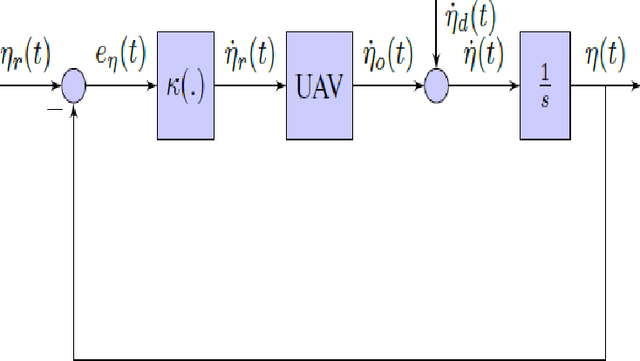
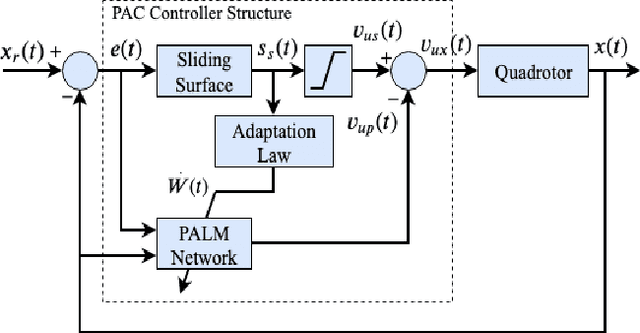
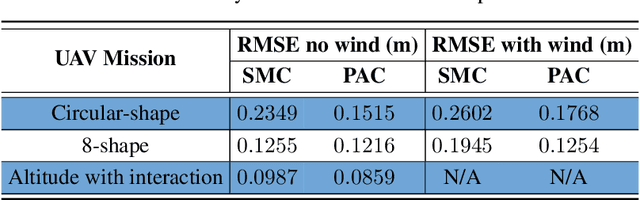
The expectation of unmanned air vehicles (UAVs) pushes the operation environment to narrow spaces, where the systems may fly very close to an object and perform an interaction. This phase brings the variation in UAV dynamics: thrust and drag coefficient of the propellers might change under different proximity. At the same time, UAVs may need to operate under external disturbances to follow time-based trajectories. Under these challenging conditions, a standard controller approach may not handle all missions with a fixed structure, where there may be a need to adjust its parameters for each different case. With these motivations, practical implementation and evaluation of an autonomous controller applied to a quadrotor UAV are proposed in this work. A self-adaptive controller based on a composite control scheme where a combination of sliding mode control (SMC) and evolving neuro-fuzzy control is used. The parameter vector of the neuro-fuzzy controller is updated adaptively based on the sliding surface of the SMC. The autonomous controller possesses a new elastic structure, where the number of fuzzy rules keeps growing or get pruned based on bias and variance balance. The interaction of the UAV is experimentally evaluated in real time considering the ground effect, ceiling effect and flight through a strong fan-generated wind while following time-based trajectories.
UAV Control in Close Proximities - Ceiling Effect on Battery Lifetime
Dec 31, 2018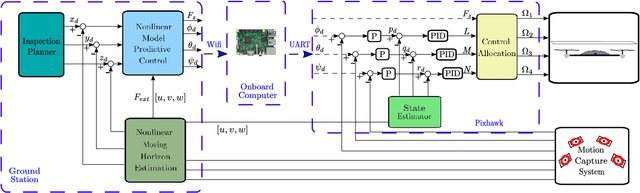
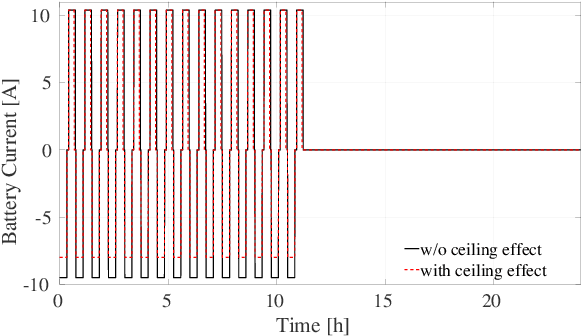
With the recent developments in the unmanned aerial vehicles (UAV), it is expected them to interact and collaborate with their surrounding objects, other robots and people in order to wisely plan and execute particular tasks. Although these interaction operations are inherently challenging as compared to free-flight missions, they might bring diverse advantages. One of them is their basic aerodynamic interaction during the flight in close proximities which can result in a reduction of the controller effort. In this study, by collecting real-time data, we have observed that the current drawn by the battery can be decreased while flying very close to the surroundings with the help of the ceiling effect. For the first time, this phenomenon is analyzed in terms of battery lifetime degradation by using a simple full equivalent cycle counting method. Results show that cycling related effect on battery degradation can be reduced by a 15.77% if the UAV can utilize ceiling effect.
PAC: A Novel Self-Adaptive Neuro-Fuzzy Controller for Micro Aerial Vehicles
Nov 09, 2018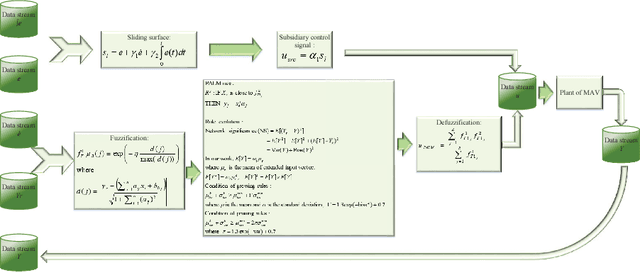
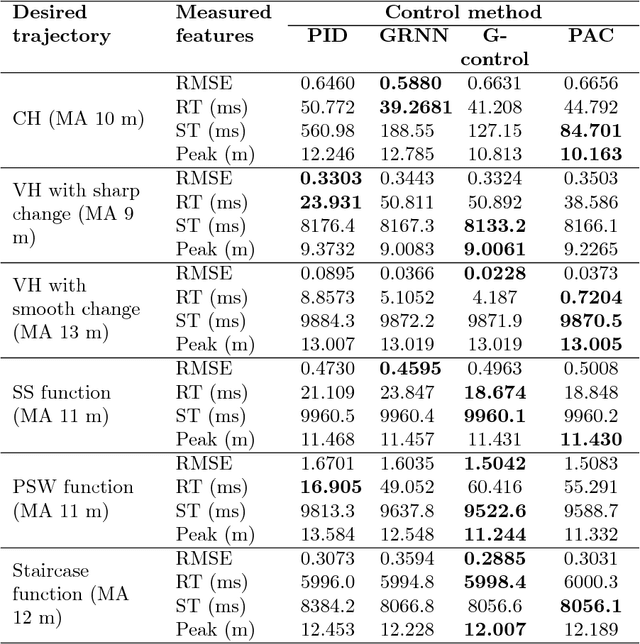
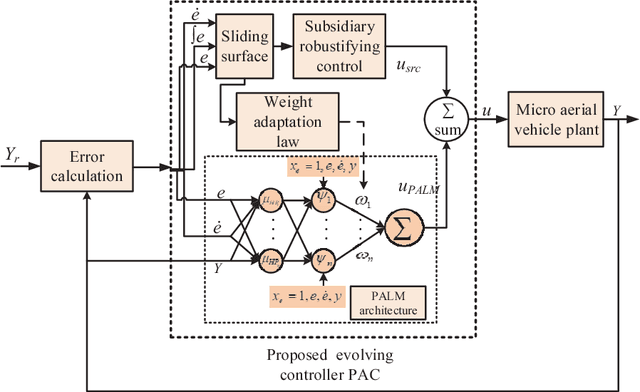
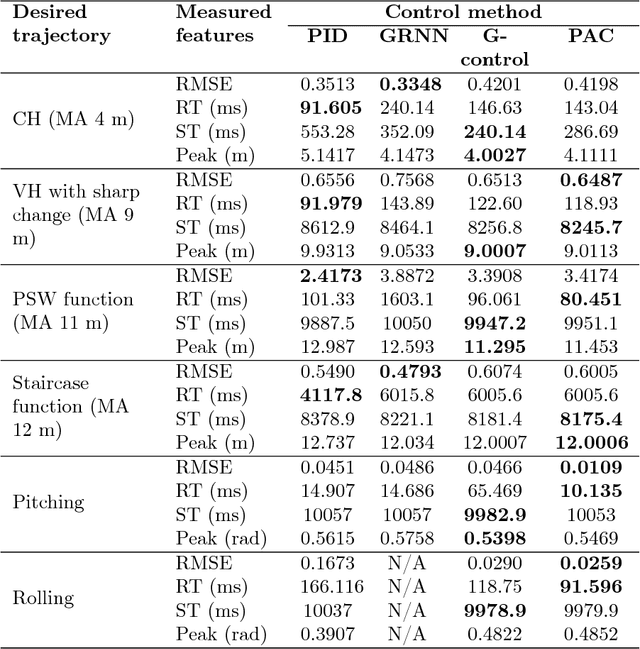
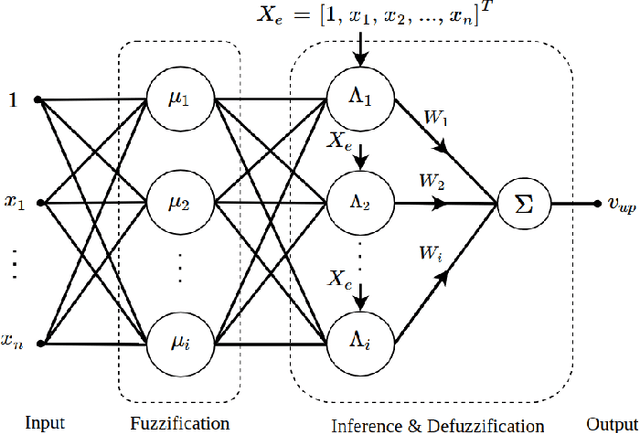
There exists an increasing demand of a flexible and computationally efficient controller for micro aerial vehicles (MAVs) due to a high degree of environmental perturbations. In this work, an evolving neuro-fuzzy controller namely Parsimonious Controller (PAC) is proposed and features less network parameters than conventional approaches due to the absence of rule premise parameters. PAC is built upon a recently developed evolving neuro-fuzzy system known as parsimonious learning machine (PALM) and adopts new rule growing and pruning modules derived from the approximation of bias and variance. These methods has no reliance on user-defined thresholds, thereby increasing its autonomy for the real-time deployment. PAC adapts the consequent parameters with the sliding mode control (SMC) theory in the single-pass fashion. The stability of our PAC is proven utilizing the Lyapunov stability analysis. Lastly, the controller's efficacy is evaluated by observing various trajectory tracking performance from a bio-inspired flapping wing micro aerial vehicle (BI-FWMAV) and a rotary wing micro aerial vehicle called hexacopter. Furthermore, it is compared against three distinctive controller. Our PAC outperforms the linear PID controller and generalized regression neural network (GRNN) based nonlinear adaptive controller. Compared to its predecessor, G-controller, the tracking accuracy is comparable but the PAC incurs significantly less parameters to attain similar or better performance than the G-controller.
Autonomous Deep Learning: Continual Learning Approach for Dynamic Environments
Oct 17, 2018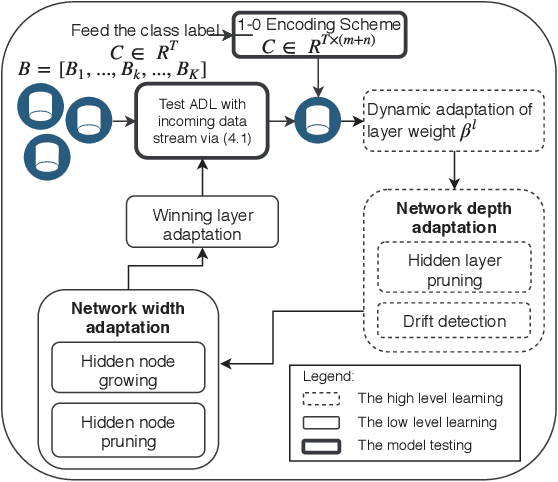
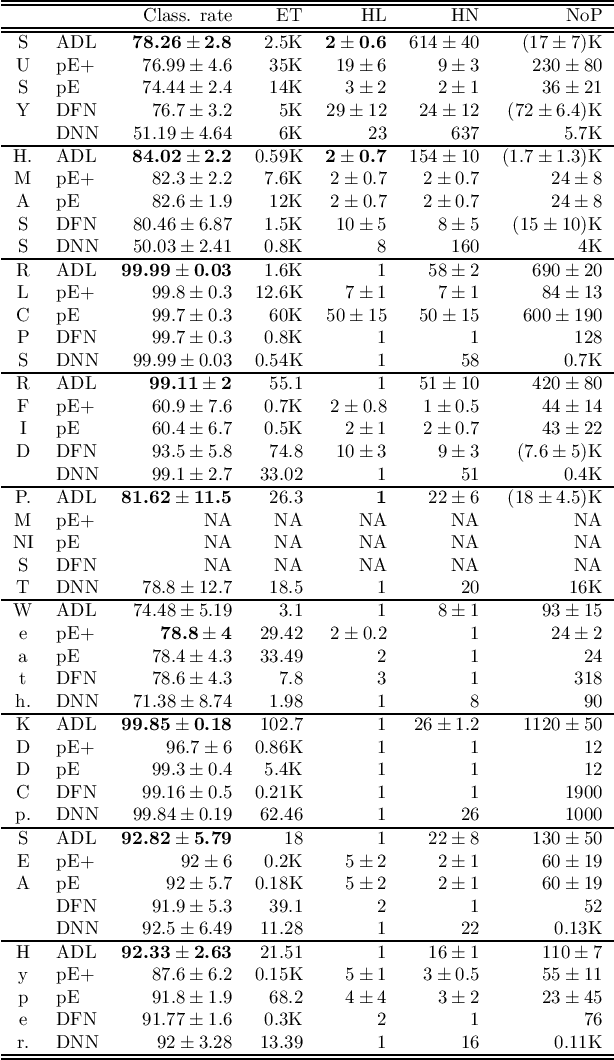
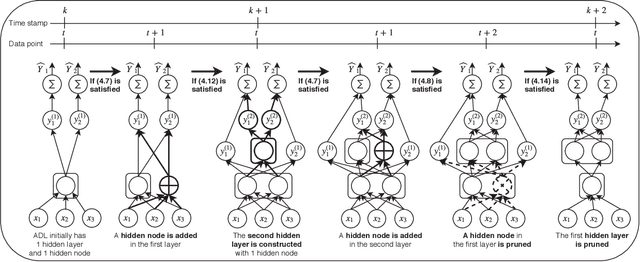
The feasibility of deep neural networks (DNNs) to address data stream problems still requires intensive study because of the static and offline nature of conventional deep learning approaches. A deep continual learning algorithm, namely autonomous deep learning (ADL), is proposed in this paper. Unlike traditional deep learning methods, ADL features a flexible structure where its network structure can be constructed from scratch with the absence of initial network structure via the self-constructing network structure. ADL specifically addresses catastrophic forgetting by having a different-depth structure which is capable of achieving a trade-off between plasticity and stability. Network significance (NS) formula is proposed to drive the hidden nodes growing and pruning mechanism. Drift detection scenario (DDS) is put forward to signal distributional changes in data streams which induce the creation of a new hidden layer. Maximum information compression index (MICI) method plays an important role as a complexity reduction module eliminating redundant layers. The efficacy of ADL is numerically validated under the prequential test-then-train procedure in lifelong environments using nine popular data stream problems. The numerical results demonstrate that ADL consistently outperforms recent continual learning methods while characterizing the automatic construction of network structures.