 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse aNETT for Solving Inverse Problems with Deep Learning
Apr 20, 2020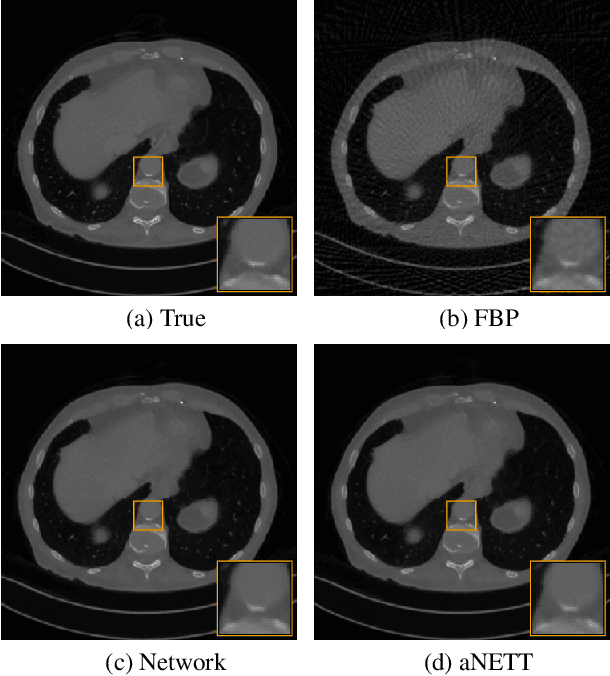
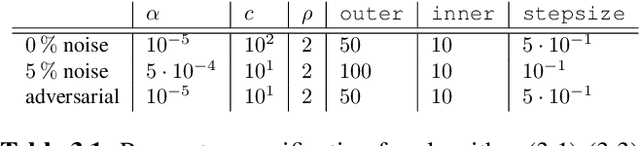
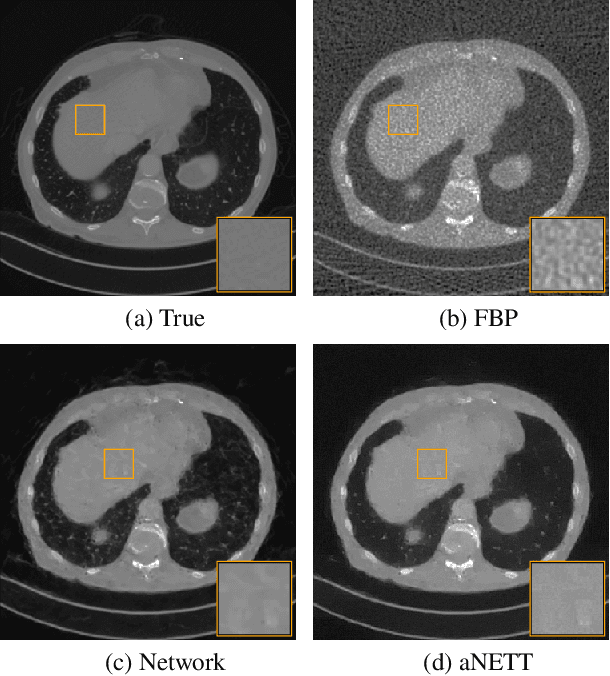
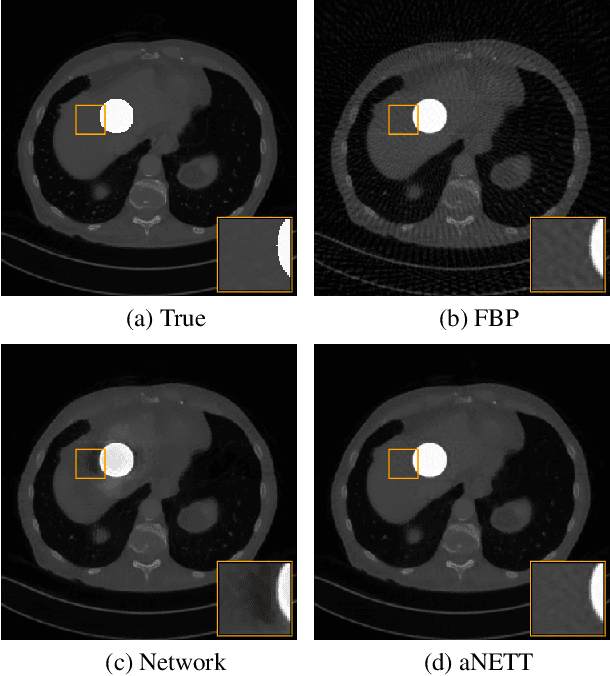
We propose a sparse reconstruction framework (aNETT) for solving inverse problems. Opposed to existing sparse reconstruction techniques that are based on linear sparsifying transforms, we train an autoencoder network $D \circ E$ with $E$ acting as a nonlinear sparsifying transform and minimize a Tikhonov functional with learned regularizer formed by the $\ell^q$-norm of the encoder coefficients and a penalty for the distance to the data manifold. We propose a strategy for training an autoencoder based on a sample set of the underlying image class such that the autoencoder is independent of the forward operator and is subsequently adapted to the specific forward model. Numerical results are presented for sparse view CT, which clearly demonstrate the feasibility, robustness and the improved generalization capability and stability of aNETT over post-processing networks.
Sparse $\ell^q$-regularization of inverse problems with deep learning
Aug 08, 2019
We propose a sparse reconstruction framework for solving inverse problems. Opposed to existing sparse reconstruction techniques that are based on linear sparsifying transforms, we train an encoder-decoder network $D \circ E$ with $E$ acting as a nonlinear sparsifying transform. We minimize a Tikhonov functional which used a learned regularization term formed by the $\ell^q$-norm of the encoder coefficients and a penalty for the distance to the data manifold. For this augmented sparse $\ell^q$-approach, we present a full convergence analysis, derive convergence rates and describe a training strategy. As a main ingredient for the analysis we establish the coercivity of the augmented regularization term.
Gaussian Mixture Marginal Distributions for Modelling Remaining Pipe Wall Thickness of Critical Water Mains in Non-Destructive Evaluation
Jul 02, 2019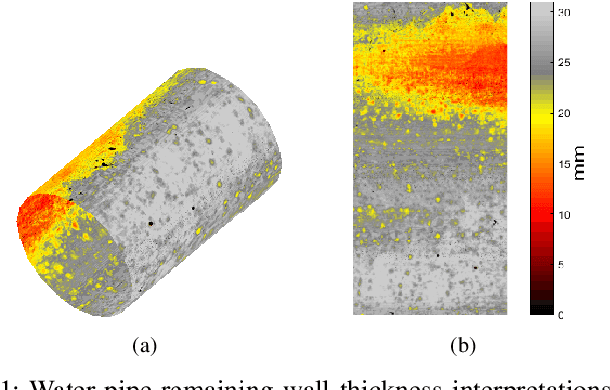
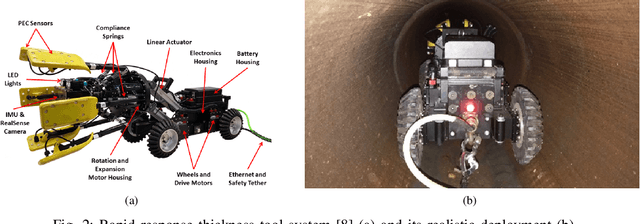
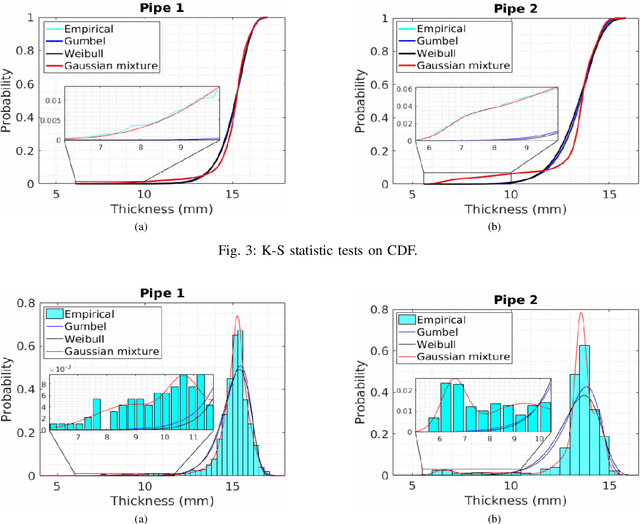
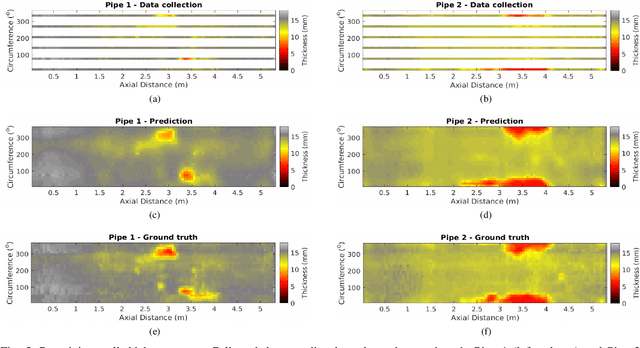
Rapidly estimating the remaining wall thickness (RWT) is paramount for the non-destructive condition assessment evaluation of large critical metallic pipelines. A robotic vehicle with embedded magnetism-based sensors has been developed to traverse the inside of a pipeline and conduct inspections at the location of a break. However its sensing speed is constrained by the magnetic principle of operation, thus slowing down the overall operation in seeking dense RWT mapping. To ameliorate this drawback, this work proposes the partial scanning of the pipe and then employing Gaussian Processes (GPs) to infer RWT at the unseen pipe sections. Since GP prediction assumes to have normally distributed input data - which does correspond with real RWT measurements - Gaussian mixture (GM) models are proven in this work as fitting marginal distributions to effectively capture the probability of any RWT value in the inspected data. The effectiveness of the proposed approach is extensively validated from real-world data collected in collaboration with a water utility from a cast iron water main pipeline in Sydney, Australia.
Can a Robot Hear the Shape and Dimensions of a Room?
Jul 02, 2019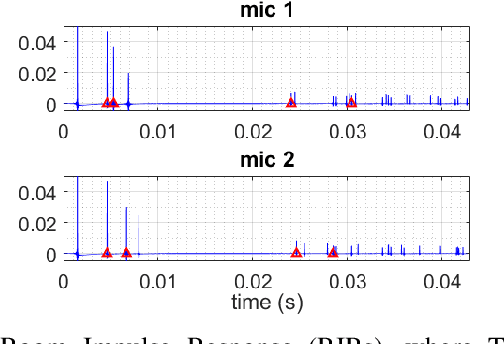
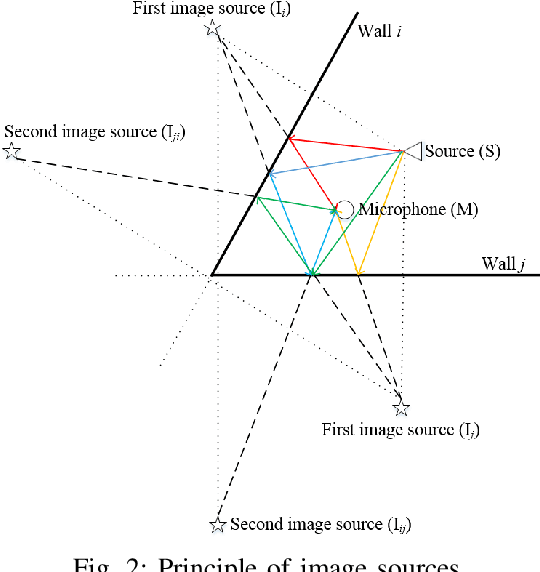
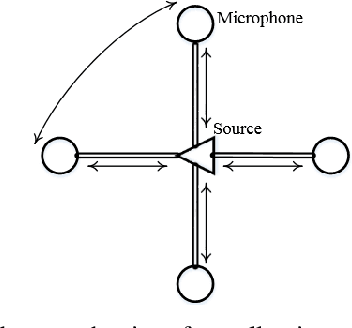
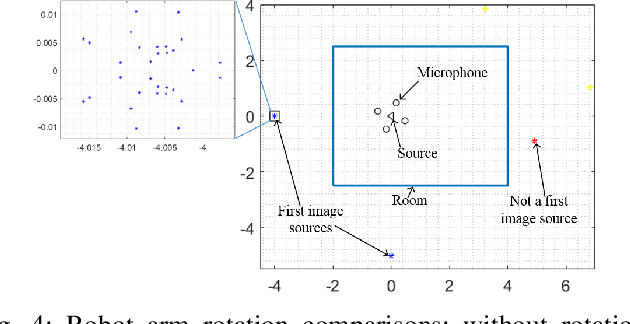
Knowing the geometry of a space is desirable for many applications, e.g. sound source localization, sound field reproduction or auralization. In circumstances where only acoustic signals can be obtained, estimating the geometry of a room is a challenging proposition. Existing methods have been proposed to reconstruct a room from the room impulse responses (RIRs). However, the sound source and microphones must be deployed in a feasible region of the room for it to work, which is impractical when the room is unknown. This work propose to employ a robot equipped with a sound source and four acoustic sensors, to follow a proposed path planning strategy to moves around the room to collect first image sources for room geometry estimation. The strategy can effectively drives the robot from a random initial location through the room so that the room geometry is guaranteed to be revealed. Effectiveness of the proposed approach is extensively validated in a synthetic environment, where the results obtained are highly promising.
Adaptive neural network based dynamic surface control for uncertain dual arm robots
May 08, 2019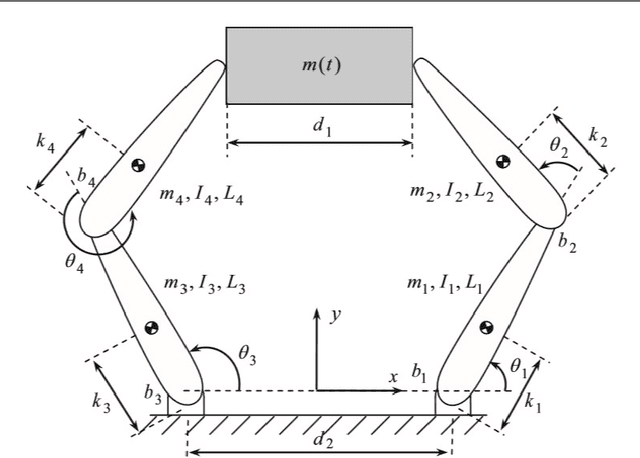
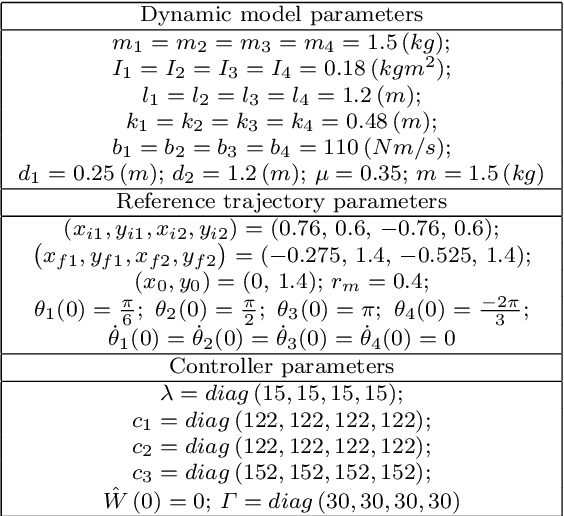
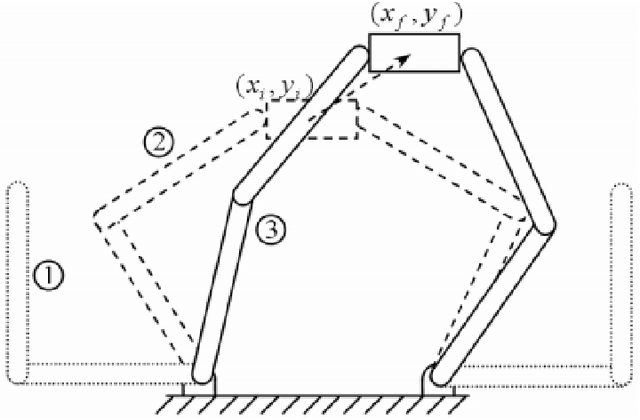
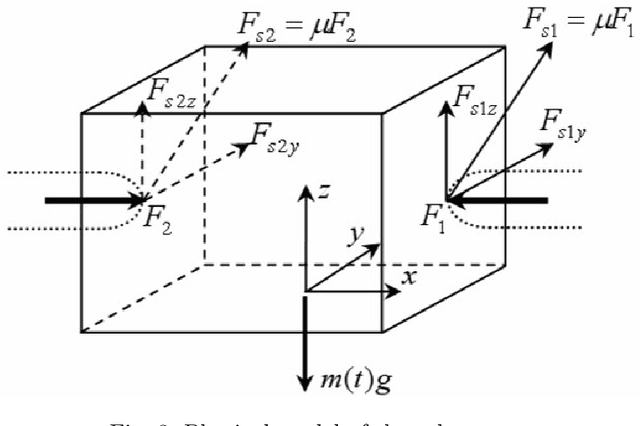
The paper discusses an adaptive strategy to effectively control nonlinear manipulation motions of a dual arm robot (DAR) under system uncertainties including parameter variations, actuator nonlinearities and external disturbances. It is proposed that the control scheme is first derived from the dynamic surface control (DSC) method, which allows the robot's end-effectors to robustly track the desired trajectories. Moreover, since exactly determining the DAR system's dynamics is impractical due to the system uncertainties, the uncertain system parameters are then proposed to be adaptively estimated by the use of the radial basis function network (RBFN). The adaptation mechanism is derived from the Lyapunov theory, which theoretically guarantees stability of the closed-loop control system. The effectiveness of the proposed RBFN-DSC approach is demonstrated by implementing the algorithm in a synthetic environment with realistic parameters, where the obtained results are highly promising.
Domain-to-Domain Translation Model for Recommender System
Dec 15, 2018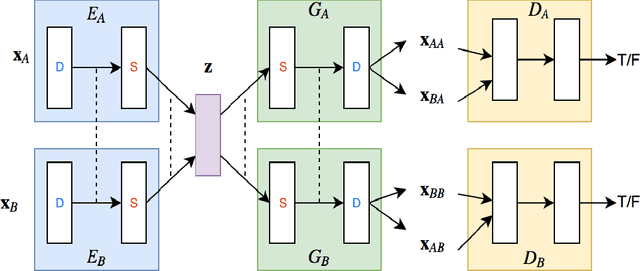
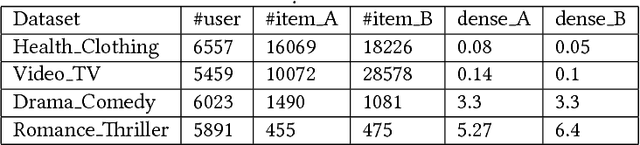
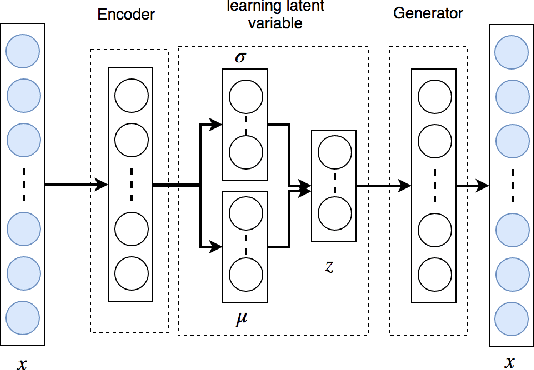
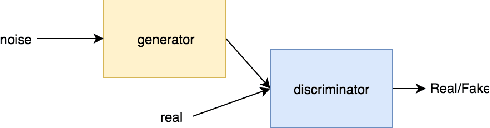
Recently multi-domain recommender systems have received much attention from researchers because they can solve cold-start problem as well as support for cross-selling. However, when applying into multi-domain items, although algorithms specifically addressing a single domain have many difficulties in capturing the specific characteristics of each domain, multi-domain algorithms have less opportunity to obtain similar features among domains. Because both similarities and differences exist among domains, multi-domain models must capture both to achieve good performance. Other studies of multi-domain systems merely transfer knowledge from the source domain to the target domain, so the source domain usually comes from external factors such as the search query or social network, which is sometimes impossible to obtain. To handle the two problems, we propose a model that can extract both homogeneous and divergent features among domains and extract data in a domain can support for other domain equally: a so-called Domain-to-Domain Translation Model (D2D-TM). It is based on generative adversarial networks (GANs), Variational Autoencoders (VAEs), and Cycle-Consistency (CC) for weight-sharing. We use the user interaction history of each domain as input and extract latent features through a VAE-GAN-CC network. Experiments underscore the effectiveness of the proposed system over state-of-the-art methods by a large margin.
A Learning and Masking Approach to Secure Learning
Jan 27, 2018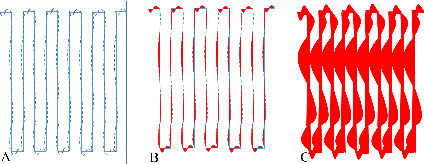
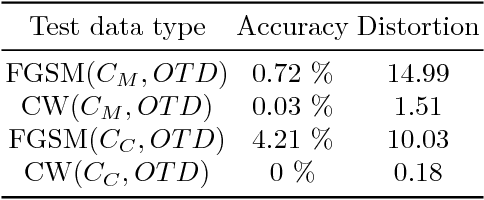
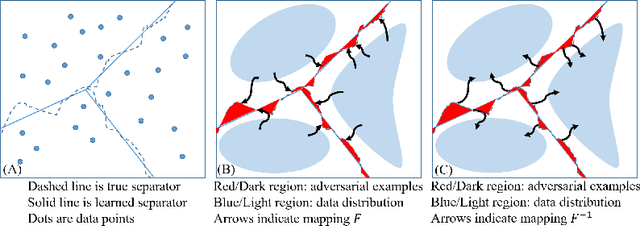
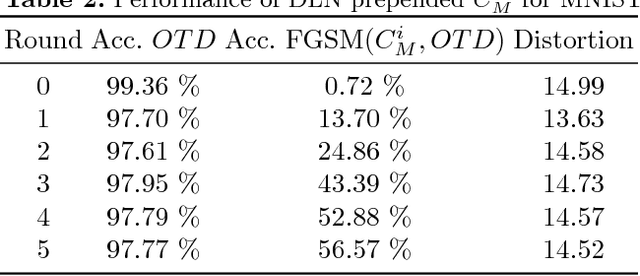
Deep Neural Networks (DNNs) have been shown to be vulnerable against adversarial examples, which are data points cleverly constructed to fool the classifier. Such attacks can be devastating in practice, especially as DNNs are being applied to ever increasing critical tasks like image recognition in autonomous driving. In this paper, we introduce a new perspective on the problem. We do so by first defining robustness of a classifier to adversarial exploitation. Next, we show that the problem of adversarial example generation can be posed as learning problem. We also categorize attacks in literature into high and low perturbation attacks; well-known attacks like fast-gradient sign method (FGSM) and our attack produce higher perturbation adversarial examples while the more potent but computationally inefficient Carlini-Wagner (CW) attack is low perturbation. Next, we show that the dual approach of the attack learning problem can be used as a defensive technique that is effective against high perturbation attacks. Finally, we show that a classifier masking method achieved by adding noise to the a neural network's logit output protects against low distortion attacks such as the CW attack. We also show that both our learning and masking defense can work simultaneously to protect against multiple attacks. We demonstrate the efficacy of our techniques by experimenting with the MNIST and CIFAR-10 datasets.
Flint Water Crisis: Data-Driven Risk Assessment Via Residential Water Testing
Sep 30, 2016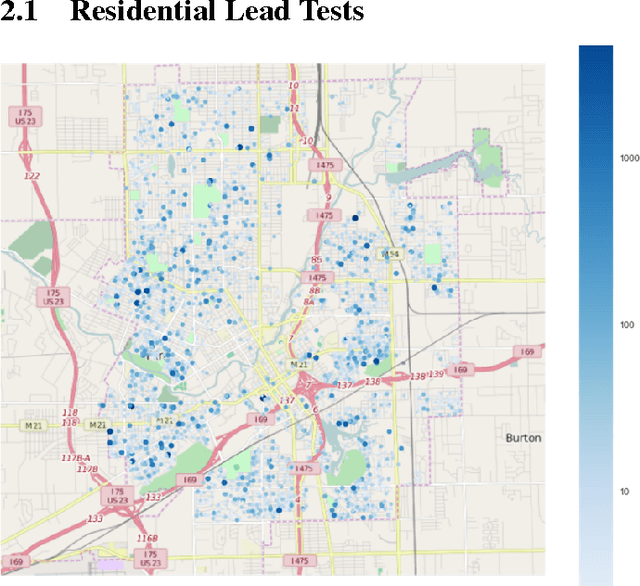
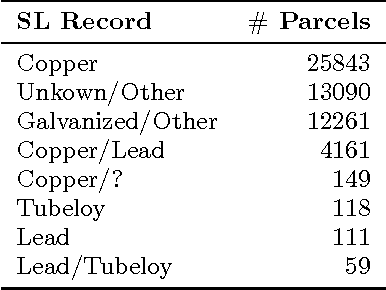
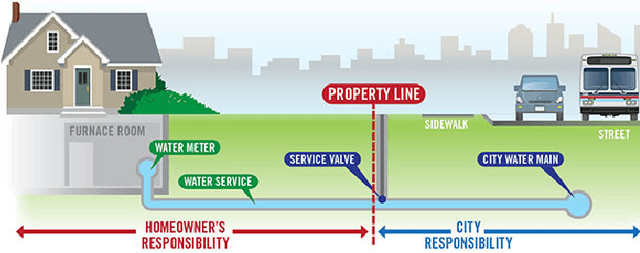
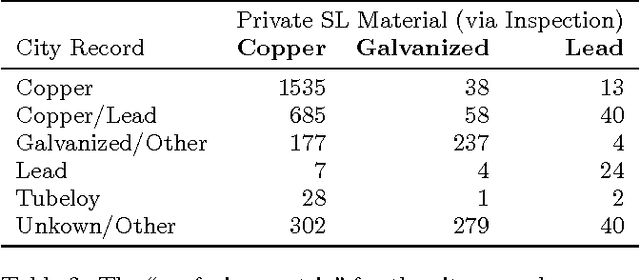
Recovery from the Flint Water Crisis has been hindered by uncertainty in both the water testing process and the causes of contamination. In this work, we develop an ensemble of predictive models to assess the risk of lead contamination in individual homes and neighborhoods. To train these models, we utilize a wide range of data sources, including voluntary residential water tests, historical records, and city infrastructure data. Additionally, we use our models to identify the most prominent factors that contribute to a high risk of lead contamination. In this analysis, we find that lead service lines are not the only factor that is predictive of the risk of lead contamination of water. These results could be used to guide the long-term recovery efforts in Flint, minimize the immediate damages, and improve resource-allocation decisions for similar water infrastructure crises.