 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusionBERT: Multi-View Image-3D Retrieval via Cross-Attention Visual Fusion and Normal-Aware 3D Encoder
Apr 02, 2026We propose FusionBERT, a novel multi-view visual fusion framework for image-3D multimodal retrieval. Existing image-3D representation learning methods predominantly focus on feature alignment of a single object image and its 3D model, limiting their applicability in realistic scenarios where an object is typically observed and captured from multiple viewpoints. Although multi-view observations naturally provide complementary geometric and appearance cues, existing multimodal large models rarely explore how to effectively fuse such multi-view visual information for better cross-modal retrieval. To address this limitation, we introduce a multi-view image-3D retrieval framework named FusionBERT, which innovatively utilizes a cross-attention-based multi-view visual aggregator to adaptively integrate features from multi-view images of an object. The proposed multi-view visual encoder fuses inter-view complementary relationships and selectively emphasizes informative visual cues across multiple views to get a more robustly fused visual feature for better 3D model matching. Furthermore, FusionBERT proposes a normal-aware 3D model encoder that can further enhance the 3D geometric feature of an object model by jointly encoding point normals and 3D positions, enabling a more robust representation learning for textureless or color-degraded 3D models. Extensive image-3D retrieval experiments demonstrate that FusionBERT achieves significantly higher retrieval accuracy than SOTA multimodal large models under both single-view and multi-view settings, establishing a strong baseline for multi-view multimodal retrieval.
Parallel Transport Unfolding: A Connection-based Manifold Learning Approach
Nov 02, 2018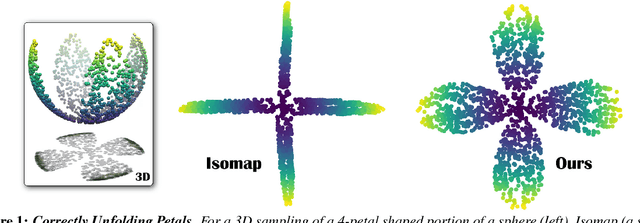
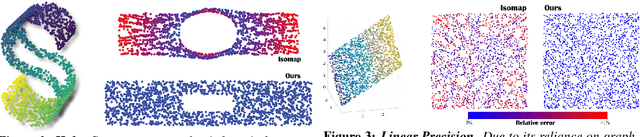


Manifold learning offers nonlinear dimensionality reduction of high-dimensional datasets. In this paper, we bring geometry processing to bear on manifold learning by introducing a new approach based on metric connection for generating a quasi-isometric, low-dimensional mapping from a sparse and irregular sampling of an arbitrary manifold embedded in a high-dimensional space. Geodesic distances of discrete paths over the input pointset are evaluated through "parallel transport unfolding" (PTU) to offer robustness to poor sampling and arbitrary topology. Our new geometric procedure exhibits the same strong resilience to noise as one of the staples of manifold learning, the Isomap algorithm, as it also exploits all pairwise geodesic distances to compute a low-dimensional embedding. While Isomap is limited to geodesically-convex sampled domains, parallel transport unfolding does not suffer from this crippling limitation, resulting in an improved robustness to irregularity and voids in the sampling. Moreover, it involves only simple linear algebra, significantly improves the accuracy of all pairwise geodesic distance approximations, and has the same computational complexity as Isomap. Finally, we show that our connection-based distance estimation can be used for faster variants of Isomap such as L-Isomap.