 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePT-ResNet: Perspective Transformation-Based Residual Network for Semantic Road Image Segmentation
Oct 29, 2019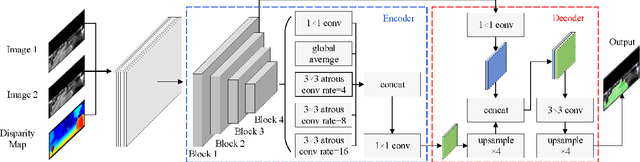
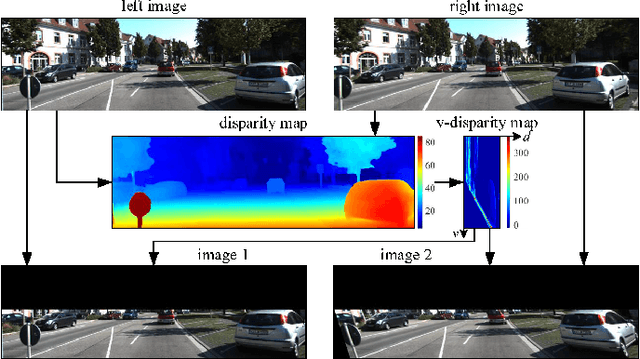
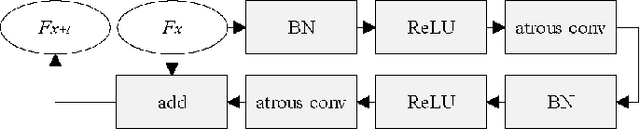
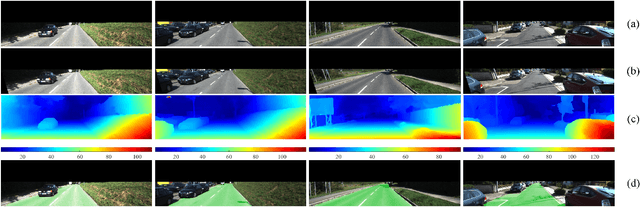
Semantic road region segmentation is a high-level task, which paves the way towards road scene understanding. This paper presents a residual network trained for semantic road segmentation. Firstly, we represent the projections of road disparities in the v-disparity map as a linear model, which can be estimated by optimizing the v-disparity map using dynamic programming. This linear model is then utilized to reduce the redundant information in the left and right road images. The right image is also transformed into the left perspective view, which greatly enhances the road surface similarity between the two images. Finally, the processed stereo images and their disparity maps are concatenated to create a set of 3D images, which are then utilized to train our neural network. The experimental results illustrate that our network achieves a maximum F1-measure of approximately 91.19% when analyzing the images from the KITTI road dataset.
OptSample: A Resilient Buffer Management Policy for Robotic Systems based on Optimal Message Sampling
Sep 26, 2019
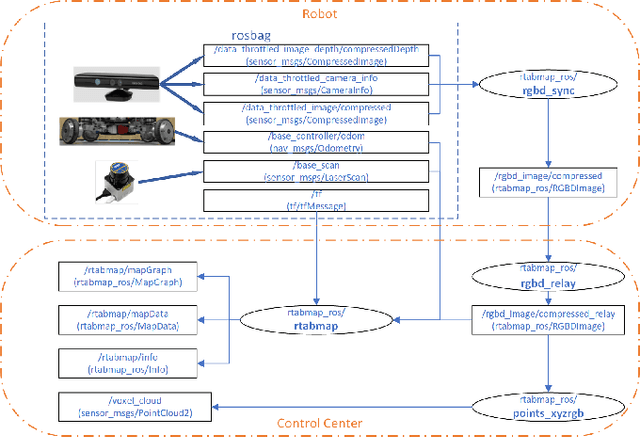
Modern robotic systems have become an alternative to humans to perform risky or exhausting tasks. In such application scenarios, communications between robots and the control center have become one of the major problems. Buffering is a commonly used solution to relieve temporary network disruption. But the assumption that newer messages are more valuable than older ones is not true for many application scenarios such as explorations, rescue operations, and surveillance. In this paper, we proposed a novel resilient buffer management policy named OptSample. It can uniformly sampling messages and dynamically adjust the sample rate based on run-time network situation. We define an evaluation function to estimate the profit of a message sequence. Based on the function, our analysis and simulation shows that the OptSample policy can effectively prevent losing long segment of continuous messages and improve the overall profit of the received messages. We implement the proposed policy in ROS. The implementation is transparent to user and no user code need to be changed. Experimental results on several application scenarios show that the OptSample policy can help robotic systems be more resilient against network disruption.