 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Sparse Voxel Fields
Jul 22, 2020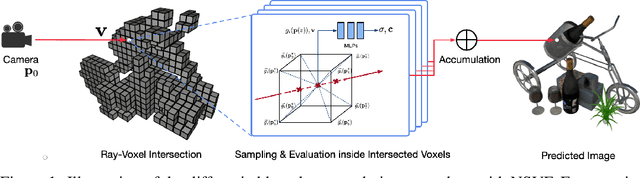
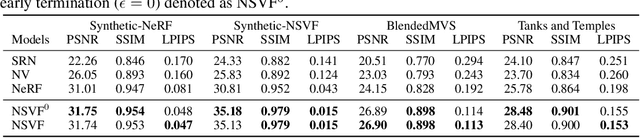
Photo-realistic free-viewpoint rendering of real-world scenes using classical computer graphics techniques is challenging, because it requires the difficult step of capturing detailed appearance and geometry models. Recent studies have demonstrated promising results by learning scene representations that implicitly encode both geometry and appearance without 3D supervision. However, existing approaches in practice often show blurry renderings caused by the limited network capacity or the difficulty in finding accurate intersections of camera rays with the scene geometry. Synthesizing high-resolution imagery from these representations often requires time-consuming optical ray marching. In this work, we introduce Neural Sparse Voxel Fields (NSVF), a new neural scene representation for fast and high-quality free-viewpoint rendering. NSVF defines a set of voxel-bounded implicit fields organized in a sparse voxel octree to model local properties in each cell. We progressively learn the underlying voxel structures with a diffentiable ray-marching operation from only a set of posed RGB images. With the sparse voxel octree structure, rendering novel views can be accelerated by skipping the voxels containing no relevant scene content. Our method is over 10 times faster than the state-of-the-art (namely, NeRF) at inference time while achieving higher quality results. Furthermore, by utilizing an explicit sparse voxel representation, our method can easily be applied to scene editing and scene composition. We also demonstrate several challenging tasks, including multi-scene learning, free-viewpoint rendering of a moving human, and large-scale scene rendering.
Learning a Disentangled Embedding for Monocular 3D Shape Retrieval and Pose Estimation
Dec 24, 2018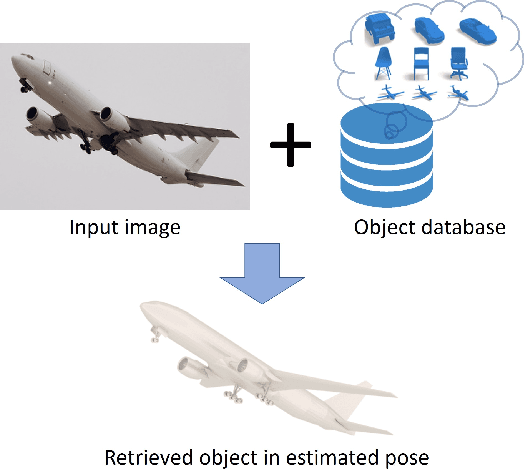
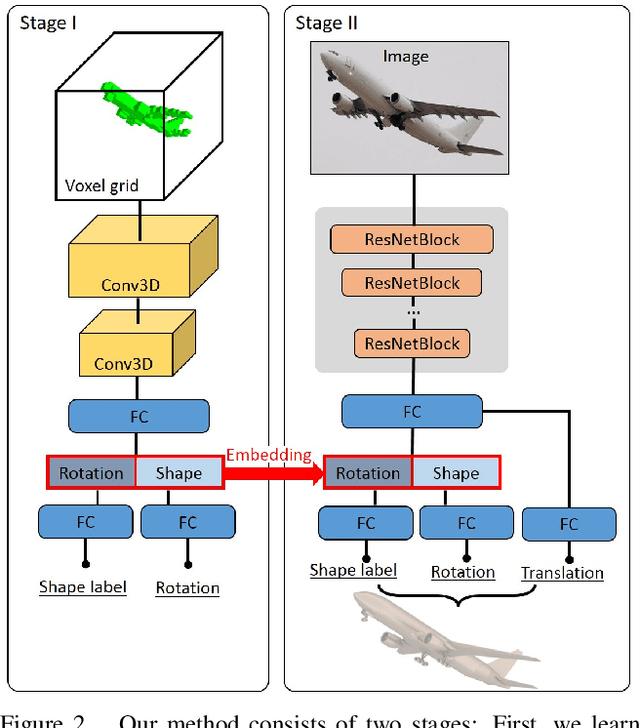
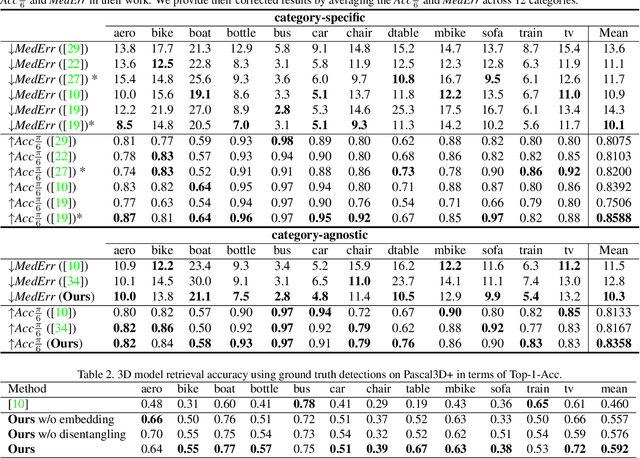
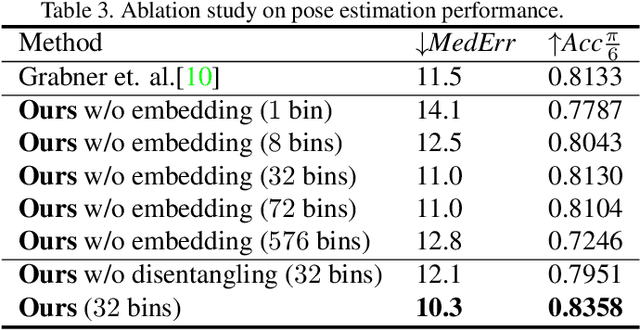
We propose a novel approach to jointly perform 3D object retrieval and pose estimation from monocular images.In order to make the method robust to real world scene variations in the images, e.g. texture, lighting and background,we learn an embedding space from 3D data that only includes the relevant information, namely the shape and pose.Our method can then be trained for robustness under real world scene variations without having to render a large training set simulating these variations. Our learned embedding explicitly disentangles a shape vector and a pose vector, which alleviates both pose bias for 3D shape retrieval and categorical bias for pose estimation. Having the learned disentangled embedding, we train a CNN to map the images to the embedding space, and then retrieve the closest 3D shape from the database and estimate the 6D pose of the object using the embedding vectors. Our method achieves 10.8 median error for pose estimation and 0.514 top-1-accuracy for category agnostic 3D object retrieval on the Pascal3D+ dataset. It therefore outperforms the previous state-of-the-art methods on both tasks.