 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDimensionality Controls When Modularity Helps in Continual Learning
Jun 16, 2026Compositional learning systems must balance plasticity, the ability to acquire new knowledge, with stability, the preservation of previously learned components, especially when tasks share structure and risk interference. We study how modular architecture, task similarity, and representational dimensionality jointly shape compositional continual learning in a sequential A-B-A paradigm, comparing a task-partitioned recurrent network to a single-network baseline while inducing high- and low-dimensional regimes via weight-scale manipulations. In a high-dimensional "lazy" regime, both architectures achieve similar performance and internal geometry, suggesting that explicit modular structure has little impact when representations are weakly constrained. In a lower-dimensional "rich" regime, modularity becomes decisive: the modular network develops graded task-specific subspaces that overlap for similar tasks, partially align for moderately dissimilar tasks, and separate for dissimilar tasks, yielding a more compositional and interpretable organization than the single network. These findings identify the representational regime induced by initialization scale, which co-varies with representational dimensionality, as a key factor governing when compositional, modular structure is functionally beneficial in continual learning, and support viewing safety and robustness as problems of adaptive allocation of representational subspaces rather than fixed separation versus sharing.
Hypernetworks That Evolve Themselves
Dec 18, 2025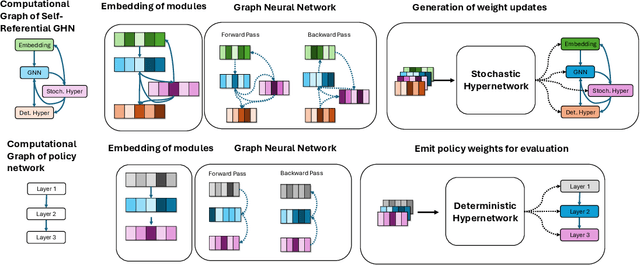
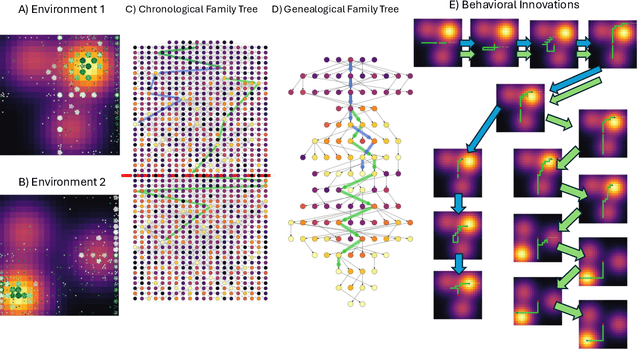
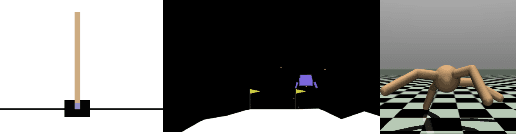
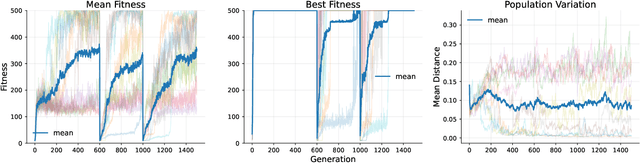
How can neural networks evolve themselves without relying on external optimizers? We propose Self-Referential Graph HyperNetworks, systems where the very machinery of variation and inheritance is embedded within the network. By uniting hypernetworks, stochastic parameter generation, and graph-based representations, Self-Referential GHNs mutate and evaluate themselves while adapting mutation rates as selectable traits. Through new reinforcement learning benchmarks with environmental shifts (CartPoleSwitch, LunarLander-Switch), Self-Referential GHNs show swift, reliable adaptation and emergent population dynamics. In the locomotion benchmark Ant-v5, they evolve coherent gaits, showing promising fine-tuning capabilities by autonomously decreasing variation in the population to concentrate around promising solutions. Our findings support the idea that evolvability itself can emerge from neural self-reference. Self-Referential GHNs reflect a step toward synthetic systems that more closely mirror biological evolution, offering tools for autonomous, open-ended learning agents.