 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Case Study in Recovery of Drones using Discrete-Event Systems
Apr 23, 2026Discrete-event systems and supervisory control theory provide a rigorous framework for specifying correct-by-construction behavior. However, their practical application to swarm robotics remains largely underexplored. In this paper, we investigate a topological recovery method based on discrete-event-systems within a swarm robotics context. We propose a hybrid architecture that combines a high-level discrete event systems supervisor with a low-level continuous controller, allowing lost drones to safely recover from fault or attack events and re-enter a controlled region. The method is demonstrated using ten simulated UAVs in the py-bullet-drones framework. We show recovery performance across four distinct scenarios, each with varying initial state estimates. Additionally, we introduce a secondary recovery supervisor that manages the regrouping process for a drone after it has re-entered the operational region.
Collaboration or Corporate Capture? Quantifying NLP's Reliance on Industry Artifacts and Contributions
Dec 06, 2023The advent of transformers, higher computational budgets, and big data has engendered remarkable progress in Natural Language Processing (NLP). Impressive performance of industry pre-trained models has garnered public attention in recent years and made news headlines. That these are industry models is noteworthy. Rarely, if ever, are academic institutes producing exciting new NLP models. Using these models is critical for competing on NLP benchmarks and correspondingly to stay relevant in NLP research. We surveyed 100 papers published at EMNLP 2022 to determine whether this phenomenon constitutes a reliance on industry for NLP publications. We find that there is indeed a substantial reliance. Citations of industry artifacts and contributions across categories is at least three times greater than industry publication rates per year. Quantifying this reliance does not settle how we ought to interpret the results. We discuss two possible perspectives in our discussion: 1) Is collaboration with industry still collaboration in the absence of an alternative? Or 2) has free NLP inquiry been captured by the motivations and research direction of private corporations?
Do What You Know: Coupling Knowledge with Action in Discrete-Event Systems
Jul 25, 2021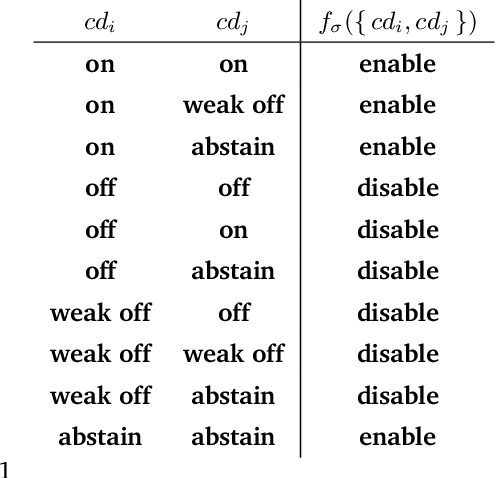
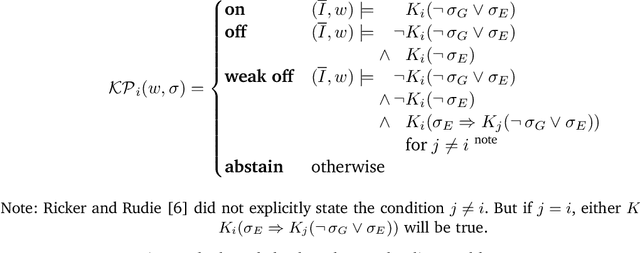
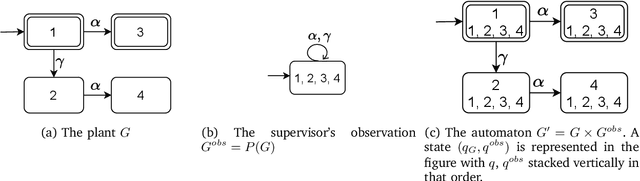
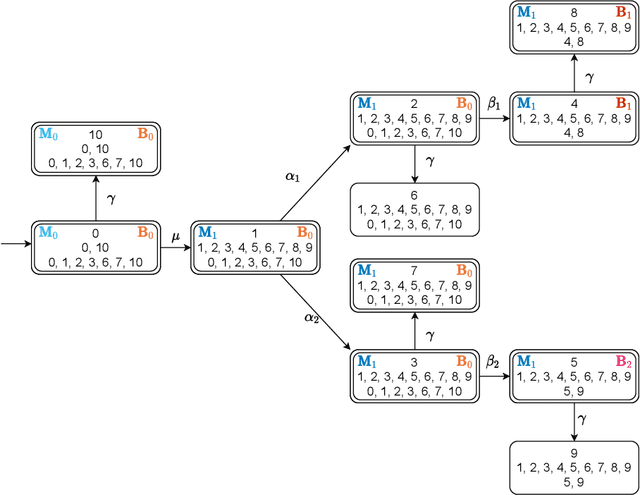
An epistemic model for decentralized discrete-event systems with non-binary control is presented. This framework combines existing work on conditional control decisions with existing work on formal reasoning about knowledge in discrete-event systems. The novelty in the model presented is that the necessary and sufficient conditions for problem solvability encapsulate the actions that supervisors must take. This direct coupling between knowledge and action -- in a formalism that mimics natural language -- makes it easier, when the problem conditions fail, to determine how the problem requirements should be revised.